Anda mungkin juga menyukai
- Spring Wind UpDokumen8 halamanSpring Wind UpAvinashRaiBelum ada peringkat
- FatigueDokumen10 halamanFatigueAvinashRaiBelum ada peringkat
- 48 WordNet Tulu ShivakumarDokumen7 halaman48 WordNet Tulu ShivakumarAvinashRaiBelum ada peringkat
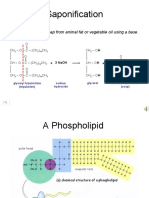
- Saponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseDokumen14 halamanSaponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseAvinashRaiBelum ada peringkat
- 13 DigestionDokumen21 halaman13 Digestionapi-270511270Belum ada peringkat
- Kathak Dance BookletDokumen58 halamanKathak Dance Bookletಜಗದೀಶ್ ಎ ಎಂBelum ada peringkat
- NoodleDokumen52 halamanNoodleAvinashRaiBelum ada peringkat
- Yoga Is UsedDokumen42 halamanYoga Is UsedAvinashRaiBelum ada peringkat
- Cocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)Dokumen80 halamanCocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)AvinashRaiBelum ada peringkat
- Customer ID Why Did You Purchase Hotstar Premium?Dokumen4 halamanCustomer ID Why Did You Purchase Hotstar Premium?AvinashRaiBelum ada peringkat
- CasshewDokumen11 halamanCasshewAvinashRaiBelum ada peringkat
- Kathak Dance BookletDokumen58 halamanKathak Dance Bookletಜಗದೀಶ್ ಎ ಎಂBelum ada peringkat
- Is 210Dokumen16 halamanIs 210Debopriyo GhoshBelum ada peringkat
- Design and Failure Modes of Automotive Suspension SpringsDokumen20 halamanDesign and Failure Modes of Automotive Suspension SpringsheliselyayBelum ada peringkat
- Design and Analysis of Independent Suspension System Using FEADokumen7 halamanDesign and Analysis of Independent Suspension System Using FEAAvinashRaiBelum ada peringkat
- Vibration Study of A Vehicle Suspension Assembly WDokumen13 halamanVibration Study of A Vehicle Suspension Assembly WAvinashRaiBelum ada peringkat
- BharatanatyamDokumen4 halamanBharatanatyamAvinashRaiBelum ada peringkat
- AJSE December2009 Lowres PDFDokumen14 halamanAJSE December2009 Lowres PDFAvinashRaiBelum ada peringkat
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleDokumen87 halamanLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiBelum ada peringkat
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleDokumen87 halamanLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiBelum ada peringkat
- FG IronDokumen23 halamanFG IronAvinashRaiBelum ada peringkat
- Dynamic Systems and Control: Associate Professor, Department of Engineering DesignDokumen1 halamanDynamic Systems and Control: Associate Professor, Department of Engineering DesignAvinashRaiBelum ada peringkat
- Disclosure To Promote The Right To InformationDokumen25 halamanDisclosure To Promote The Right To InformationmggogsBelum ada peringkat
- Machine Design Ball Screw Vol 1 e BookDokumen22 halamanMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीBelum ada peringkat
- Bolted 1Dokumen47 halamanBolted 1Purna ChBelum ada peringkat
- Absolute vs Relative Error - Calculating Approximation PrecisionDokumen1 halamanAbsolute vs Relative Error - Calculating Approximation PrecisionAvinashRaiBelum ada peringkat
- About Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorDokumen17 halamanAbout Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorAvinashRaiBelum ada peringkat
- Machine Design Ball Screw Vol 1 e BookDokumen22 halamanMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीBelum ada peringkat
- Three Wheeled Vehicle Eprintsrvr IIScDokumen30 halamanThree Wheeled Vehicle Eprintsrvr IIScSunilkumar ReddyBelum ada peringkat
- Adams SolverDokumen138 halamanAdams Solveravegliante9314Belum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Thin Slender Concrete Rectangular Walls in Moderate Seismic Regions With A Single Reinforcement Layer2020journal of Building Engineering PDFDokumen12 halamanThin Slender Concrete Rectangular Walls in Moderate Seismic Regions With A Single Reinforcement Layer2020journal of Building Engineering PDFLeonardo Chavez VillamizarBelum ada peringkat
- Lecture-08-Theory of Metal Cutting-Theory of Chip FormationDokumen22 halamanLecture-08-Theory of Metal Cutting-Theory of Chip FormationDipu SubranBelum ada peringkat
- Dense Phase Co2 Transport PDFDokumen87 halamanDense Phase Co2 Transport PDFSchöberl ErichBelum ada peringkat
- Phase2 TutorialDokumen22 halamanPhase2 Tutorialmed AmineBelum ada peringkat
- Workshop 04.1: Metal Plasticity: ANSYS Mechanical Basic Structural NonlinearitiesDokumen28 halamanWorkshop 04.1: Metal Plasticity: ANSYS Mechanical Basic Structural NonlinearitiesSahil JawaBelum ada peringkat
- Models Mems Fluid-Structure Interaction COMSOLDokumen18 halamanModels Mems Fluid-Structure Interaction COMSOLgf-antaresBelum ada peringkat
- Nuclear Engineering and Design: Sugandha Singh, Abhinav GuptaDokumen13 halamanNuclear Engineering and Design: Sugandha Singh, Abhinav GuptaJAGARAN CHAKMABelum ada peringkat
- High Temperature MaterialsDokumen120 halamanHigh Temperature MaterialsMithun Ravichandran80% (5)
- Universal Testing Machine Compliance: What Is It?Dokumen4 halamanUniversal Testing Machine Compliance: What Is It?Erisell CastilloBelum ada peringkat
- SOM QB For Unit Test IDokumen5 halamanSOM QB For Unit Test IculvertsBelum ada peringkat
- 2004 ELASTO PLASTIC FE ANALYSIS ON MOMENT ROTATION Relations of Top and Seat Angle Connections PDFDokumen10 halaman2004 ELASTO PLASTIC FE ANALYSIS ON MOMENT ROTATION Relations of Top and Seat Angle Connections PDFalfonsoBelum ada peringkat
- Imperfections in solids and their mechanical propertiesDokumen14 halamanImperfections in solids and their mechanical propertiesAbdulrahman AlsubieBelum ada peringkat
- The Complete Book On Rubber Processing and Compounding TechnologyDokumen97 halamanThe Complete Book On Rubber Processing and Compounding TechnologyPraveen M100% (1)
- Principles of Welding Processes, Physics, Chemistry, and MetallurgyDokumen2 halamanPrinciples of Welding Processes, Physics, Chemistry, and Metallurgyvladimirsoler0150% (2)
- BF 03266576Dokumen9 halamanBF 03266576Gianni FurgoneBelum ada peringkat
- Needle Tip Deformation After PDL and Intraseptal Dental Local AnesthesiaDokumen5 halamanNeedle Tip Deformation After PDL and Intraseptal Dental Local AnesthesiaMohammad AkheelBelum ada peringkat
- FEA in Practice 20.04Dokumen198 halamanFEA in Practice 20.04Juan Jose Flores FiallosBelum ada peringkat
- Steel: Dr. Mahesh Mungule IitramDokumen19 halamanSteel: Dr. Mahesh Mungule IitramGulshan KumarBelum ada peringkat
- Modelling and Analysis of Femur Bone by Using Finite Element AnalysisDokumen50 halamanModelling and Analysis of Femur Bone by Using Finite Element Analysismohan reddyBelum ada peringkat
- Effect of Welding Current Voltage On Tensile Strength of Pressure Vessel Steel Submerged Welded JointsDokumen4 halamanEffect of Welding Current Voltage On Tensile Strength of Pressure Vessel Steel Submerged Welded JointsCioroaga Bogdan DorelBelum ada peringkat
- MarcDokumen20 halamanMarcHoang MaiBelum ada peringkat
- K Hjort 1994 J. Micromech. Microeng. 4 001Dokumen14 halamanK Hjort 1994 J. Micromech. Microeng. 4 001Hazel Chavez MartinezBelum ada peringkat
- Strutting systems for deep excavations technical challengesDokumen10 halamanStrutting systems for deep excavations technical challengesratneshtripathi1412Belum ada peringkat
- Graduate Program CoursesDokumen11 halamanGraduate Program CoursesAhmed Adel IbrahimBelum ada peringkat
- 2016 Advances in Tool Wear in Turning ProcessDokumen14 halaman2016 Advances in Tool Wear in Turning ProcessorlandoduranBelum ada peringkat
- Highway Embankment Failures in Silty ClayDokumen15 halamanHighway Embankment Failures in Silty ClaySafwat El RoubyBelum ada peringkat
- Physics of Feldenkrais 2Dokumen9 halamanPhysics of Feldenkrais 2ANAHATA2010100% (3)
- Biomechanics of CartilageDokumen14 halamanBiomechanics of CartilageEric Urbina SantibañezBelum ada peringkat
- Plastic Hardening Model TheoryDokumen36 halamanPlastic Hardening Model TheorykrainajackaBelum ada peringkat
- 3.4.2.2 The Young ModulusDokumen83 halaman3.4.2.2 The Young ModulusThushani KirupaharanBelum ada peringkat