Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Selective Modal Control For Vibration Reduction in Flexible Structures 2017Dokumen6 halamanSelective Modal Control For Vibration Reduction in Flexible Structures 2017oscar201140Belum ada peringkat
- Analisis de EstructurasDokumen6 halamanAnalisis de Estructurasoscar201140Belum ada peringkat
- Acta Astronautica: Yang Zhao, Zheng Feng BaiDokumen9 halamanActa Astronautica: Yang Zhao, Zheng Feng Baioscar201140Belum ada peringkat
- End-Effector Trajectory Tracking in Flexible Arms Comparison of Approaches Based On Regulation TheoryDokumen17 halamanEnd-Effector Trajectory Tracking in Flexible Arms Comparison of Approaches Based On Regulation Theoryoscar201140Belum ada peringkat
- Adaptive Control of A Flexible Robot Using Fuzzy LogicDokumen7 halamanAdaptive Control of A Flexible Robot Using Fuzzy Logicoscar201140Belum ada peringkat
- A Vibration Abosortion Method For Alleviation Impact of Flexible Robotic Arm - AsmeDokumen9 halamanA Vibration Abosortion Method For Alleviation Impact of Flexible Robotic Arm - Asmeoscar201140Belum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- 29 DT Fir FiltersDokumen16 halaman29 DT Fir FiltersahmdBelum ada peringkat
- Control System Design: Graham C. Goodwin Stefan F. Graebe Mario E. SalgadoDokumen17 halamanControl System Design: Graham C. Goodwin Stefan F. Graebe Mario E. SalgadoPriyadarshini SahooBelum ada peringkat
- Micro-DCI Micro-Mite 53SL6000 Single Loop Controllers: - 2-Year WarrantyDokumen4 halamanMicro-DCI Micro-Mite 53SL6000 Single Loop Controllers: - 2-Year WarrantyMoiReyesBelum ada peringkat
- Fuzzy Sliding Mode Control ThesisDokumen6 halamanFuzzy Sliding Mode Control Thesisgbwav8m4100% (2)
- Balancing of An Inverted Pendulum With A SCARA Robot: Bernhard Sprenger, Ladislav Kucera, and Safer MouradDokumen6 halamanBalancing of An Inverted Pendulum With A SCARA Robot: Bernhard Sprenger, Ladislav Kucera, and Safer Mouradhophuong_dhvBelum ada peringkat
- The Integration of Process Design and ControlDokumen656 halamanThe Integration of Process Design and Controlsheida shBelum ada peringkat
- An Optimal Control Approach To Robust Control of Robot ManipulatorsDokumen10 halamanAn Optimal Control Approach To Robust Control of Robot ManipulatorsYunus Emre DemirelBelum ada peringkat
- User'S Manual: Lift ApplicationDokumen63 halamanUser'S Manual: Lift ApplicationCarolina Sansón100% (2)
- Active Magnetic BearingDokumen20 halamanActive Magnetic BearingSanat patilBelum ada peringkat
- Block Diagram and StabilityDokumen101 halamanBlock Diagram and Stabilityhasan bishBelum ada peringkat
- PCVLDokumen16 halamanPCVLabmuqeet2Belum ada peringkat
- Fractional Order PID Controller Tuning Based On IMCDokumen15 halamanFractional Order PID Controller Tuning Based On IMCijitcajournalBelum ada peringkat
- An Introduction To Feedback Control SystemsDokumen21 halamanAn Introduction To Feedback Control Systemspandey99Belum ada peringkat
- Unified Power Quality Conditioner (Upqc) With Pi and Hysteresis Controller For Power Quality Improvement in Distribution SystemsDokumen7 halamanUnified Power Quality Conditioner (Upqc) With Pi and Hysteresis Controller For Power Quality Improvement in Distribution SystemsKANNAN MANIBelum ada peringkat
- Wheel Control TheoryDokumen7 halamanWheel Control TheoryNgurah BimantaraBelum ada peringkat
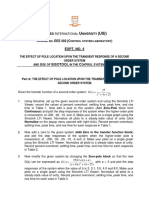
- U U (UIU) : Expt. No. 4Dokumen7 halamanU U (UIU) : Expt. No. 4Maksud SarkerBelum ada peringkat
- ARIANE 5 Failure - Full ReportDokumen12 halamanARIANE 5 Failure - Full ReportSreedhar GundlapalliBelum ada peringkat
- Fuzzy ControlDokumen37 halamanFuzzy Controltecav94114Belum ada peringkat
- 8.2 System Compensation Control ActionDokumen9 halaman8.2 System Compensation Control Actionvidya_sagar826Belum ada peringkat
- Carrying Out Preventative Planned Maintenance On Electrical EquipmentDokumen9 halamanCarrying Out Preventative Planned Maintenance On Electrical EquipmentJordan Leah50% (2)
- An Economical Class of Digital Filters For Decimation and Interpolation-FoLDokumen8 halamanAn Economical Class of Digital Filters For Decimation and Interpolation-FoLrasikarajaBelum ada peringkat
- Engineering enDokumen395 halamanEngineering enhaineleiBelum ada peringkat
- Topic 5 Fundamentals of Robots 2Dokumen46 halamanTopic 5 Fundamentals of Robots 2Elvis OmondiBelum ada peringkat
- Servomechanism: Application of Servo MechanismDokumen6 halamanServomechanism: Application of Servo MechanismJawad SandhuBelum ada peringkat
- S120 Drive FCT Man 0620 en-USDokumen1.006 halamanS120 Drive FCT Man 0620 en-USMarian ChobodaBelum ada peringkat
- CollegepptDokumen38 halamanCollegepptneethurj9Belum ada peringkat
- Laboratory Manual: Subject Name: CMP10460 Simulation and ModelingDokumen6 halamanLaboratory Manual: Subject Name: CMP10460 Simulation and ModelingMuhammad AjmalBelum ada peringkat
- 351 792 1 SMDokumen3 halaman351 792 1 SMIulia MunteanuBelum ada peringkat