Anda mungkin juga menyukai
- Suspension: Spring CalculationsDokumen1 halamanSuspension: Spring CalculationsChandrakiran AlapatiBelum ada peringkat
- Technical Information: Vol. PB-2Dokumen2 halamanTechnical Information: Vol. PB-2أبومحمدالزياتBelum ada peringkat
- (Replacement Criteria For Traction Sheave) K 608007-01Dokumen4 halaman(Replacement Criteria For Traction Sheave) K 608007-01Ali DiabBelum ada peringkat
- Screenshot 2023-11-16 at 3.45.42 PMDokumen20 halamanScreenshot 2023-11-16 at 3.45.42 PMrajeevbhardwaj20Belum ada peringkat
- Lecture 6 - Modelling and Analysis of The Full VehicleDokumen57 halamanLecture 6 - Modelling and Analysis of The Full Vehiclehotsync101Belum ada peringkat
- Maintain microscope lenses, objectives and nosepieceDokumen2 halamanMaintain microscope lenses, objectives and nosepieceElvin HernandezBelum ada peringkat
- Bowex Curved-Tooth Gear Couplings: Type As No. 004 and Spec.-I No. 005Dokumen1 halamanBowex Curved-Tooth Gear Couplings: Type As No. 004 and Spec.-I No. 005Mauricio Ariel H. OrellanaBelum ada peringkat
- Bevel EAR: Competence and PerformanceDokumen8 halamanBevel EAR: Competence and PerformancevikiBelum ada peringkat
- Instruction Manual: Aluminum Site-Rite Hand Benders AND Iron Site-Rite Hand BendersDokumen28 halamanInstruction Manual: Aluminum Site-Rite Hand Benders AND Iron Site-Rite Hand BendersAymeeenBelum ada peringkat
- Revelation III LedDokumen2 halamanRevelation III LedAdriana Flor SalazarBelum ada peringkat
- Cte100-5 h490 TC Kq10sd-3 English SadromDokumen1 halamanCte100-5 h490 TC Kq10sd-3 English SadromSC SADROM TEH SRLBelum ada peringkat
- Catálogo 37FSDokumen6 halamanCatálogo 37FSMarcos Marcandali de JesusBelum ada peringkat
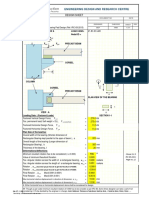
- Design Sheet: View A Load Case= Nodal ID = α F F F Precast BeamDokumen5 halamanDesign Sheet: View A Load Case= Nodal ID = α F F F Precast BeamGanesh PrabuBelum ada peringkat
- Ball Screw ServotakDokumen4 halamanBall Screw ServotakdipakBelum ada peringkat
- Gripper Sommer GK35NDokumen17 halamanGripper Sommer GK35NAdrian StateBelum ada peringkat
- Teach PendantDokumen1 halamanTeach PendantTuấn TúBelum ada peringkat
- DS DMG DMU 80P DuoBLOCK Automotive Tire Mold enDokumen2 halamanDS DMG DMU 80P DuoBLOCK Automotive Tire Mold enPaul VeramendiBelum ada peringkat
- Pillar and Wall-Mounted Slewing Jib Cranes: Move MoreDokumen18 halamanPillar and Wall-Mounted Slewing Jib Cranes: Move MoreEgemen AkbulutBelum ada peringkat
- Claude - FSS 1 W Methodology For Formula Student Suspension Kinematics DesignDokumen55 halamanClaude - FSS 1 W Methodology For Formula Student Suspension Kinematics DesignSatvik Vatsa100% (2)
- GP 180Dokumen2 halamanGP 180yousufBelum ada peringkat
- Iveco c78 c10 c13 Wshop ManualDokumen584 halamanIveco c78 c10 c13 Wshop ManualDarrell Nickels100% (2)
- Cam SoftwareDokumen5 halamanCam SoftwarebennyfergusonBelum ada peringkat
- M16iB FootprintDokumen2 halamanM16iB Footprintto0984903132Belum ada peringkat
- Manual Mitutoyo Digimatic CaliperDokumen1 halamanManual Mitutoyo Digimatic CaliperPubcrawl100% (1)
- M-16 Series: Basic DescriptionDokumen2 halamanM-16 Series: Basic DescriptiondavidBelum ada peringkat
- Durilock Marketing Bulletin PELJ0343Dokumen7 halamanDurilock Marketing Bulletin PELJ0343Patricio AlvaradoBelum ada peringkat
- Gimatic EMI PSP Radial GripperDokumen13 halamanGimatic EMI PSP Radial GripperReuben MuriguBelum ada peringkat
- Samsung Machine Tools: PL 20M/25 / 25M / 30Dokumen6 halamanSamsung Machine Tools: PL 20M/25 / 25M / 30Angel LeydanBelum ada peringkat
- Arc Welding Solution: With Yaskawa MotomanDokumen26 halamanArc Welding Solution: With Yaskawa MotomanMayank Jain0% (1)
- Textiles Yarn Production: SieglingDokumen20 halamanTextiles Yarn Production: SieglingSebastian QuintanaBelum ada peringkat
- Teach PendantDokumen1 halamanTeach PendantErragueb Moussaoui IdrissiBelum ada peringkat
- 1 - Chapter 1 - Lecture 2 - Torsional LoadDokumen8 halaman1 - Chapter 1 - Lecture 2 - Torsional LoadRami AbdelaalBelum ada peringkat
- Schmidt MGZDokumen20 halamanSchmidt MGZsanatikalaBelum ada peringkat
- INTEGREX AG Series - Brochure - DigitalDokumen7 halamanINTEGREX AG Series - Brochure - Digitalrenilpeter89Belum ada peringkat
- Type 37Fsb: Balanced Fully Split SealDokumen6 halamanType 37Fsb: Balanced Fully Split SealKantakuzinBelum ada peringkat
- Mechanical Engineering - April 2011Dokumen76 halamanMechanical Engineering - April 2011johan100% (1)
- KUKA KR C10Dokumen1 halamanKUKA KR C10kancerbero91Belum ada peringkat
- הזט קטלוג 2019-2020 HAZETDokumen24 halamanהזט קטלוג 2019-2020 HAZETחברת גוטמן ברזיליBelum ada peringkat
- Linear Drives DGC-K: Look For The Star!Dokumen36 halamanLinear Drives DGC-K: Look For The Star!a.ghani BaRaCuDaBelum ada peringkat
- Team 18 - Bullz Racing: Engineering Design Presentation LinkDokumen52 halamanTeam 18 - Bullz Racing: Engineering Design Presentation LinkYuvaraj BadigerBelum ada peringkat
- Lecture 4Dokumen25 halamanLecture 4AbdulBelum ada peringkat
- Jarret SeriesDokumen10 halamanJarret SeriesKarimZianiBelum ada peringkat
- Greener High Level Summary V1.0Dokumen29 halamanGreener High Level Summary V1.0Balachander RkBelum ada peringkat
- Ok 0402-PL800V VMDokumen6 halamanOk 0402-PL800V VMAngel LeydanBelum ada peringkat
- RCR 35ia (E) 02aDokumen2 halamanRCR 35ia (E) 02apc100xohmBelum ada peringkat
- Model 163 Rigid Planetary Axle Model 263 Steering Planetary AxleDokumen2 halamanModel 163 Rigid Planetary Axle Model 263 Steering Planetary AxleFernando MarinBelum ada peringkat
- CG - Eng .223 Drill Pipe Care and HandlingDokumen12 halamanCG - Eng .223 Drill Pipe Care and Handlingjinyuan74Belum ada peringkat
- Katalog 2016 EN1 Web PDFDokumen577 halamanKatalog 2016 EN1 Web PDFdivjak70Belum ada peringkat
- Acupoint: Anti-Cross-Threading FeatureDokumen1 halamanAcupoint: Anti-Cross-Threading FeaturePaulo Henrique NascimentoBelum ada peringkat
- Cam Types and Layout DiagramsDokumen41 halamanCam Types and Layout DiagramsmanilycanBelum ada peringkat
- ISOMAG Bearing IsolatorDokumen4 halamanISOMAG Bearing Isolatorrembrandt mostolesBelum ada peringkat
- Series: Actuators General CatalogDokumen10 halamanSeries: Actuators General Catalogrieza_fBelum ada peringkat
- Magnet Technology CT - MT - 00000005mag - en 2 12.2021Dokumen52 halamanMagnet Technology CT - MT - 00000005mag - en 2 12.2021danang hari nur cahyoBelum ada peringkat
- CCK/W33: Spherical Roller BearingsDokumen4 halamanCCK/W33: Spherical Roller BearingshamdaBelum ada peringkat
- PB09_Gyproc_CoreBoardDokumen2 halamanPB09_Gyproc_CoreBoardmauryadevesh6Belum ada peringkat
- Edge Tool For Mountain Cutting Models of Value: Quality Changes The WorldDokumen2 halamanEdge Tool For Mountain Cutting Models of Value: Quality Changes The WorldLutfi DstrBelum ada peringkat
- GraflexDokumen104 halamanGraflexMd. Alam HasnatBelum ada peringkat
- Datasheet M-710iC-45MDokumen1 halamanDatasheet M-710iC-45MEdgar Ivan BorbollaBelum ada peringkat
- MBV - Products - List V-Belt VNDokumen1 halamanMBV - Products - List V-Belt VNSteven PhamBelum ada peringkat
- Torbini Team Invitation Letter To MATE FinalsDokumen1 halamanTorbini Team Invitation Letter To MATE FinalsAhmed AbdelfattahBelum ada peringkat
- Ats48 User Manual PDFDokumen81 halamanAts48 User Manual PDFAhmed AbdelfattahBelum ada peringkat
- 3pi Quick StartDokumen2 halaman3pi Quick StartAdam AhmatBelum ada peringkat
- RC Alexandria TournamentDokumen3 halamanRC Alexandria TournamentAhmed AbdelfattahBelum ada peringkat
- Beams On Elastic FoundationDokumen15 halamanBeams On Elastic FoundationIngeniero EstructuralBelum ada peringkat
- Scheme of Work - Cambridge IGCSE Physics (0625) : Unit 5: ElectromagnetismDokumen5 halamanScheme of Work - Cambridge IGCSE Physics (0625) : Unit 5: ElectromagnetismEman Gamal Mahmoud HusseinBelum ada peringkat
- BU1-AC - AC-voltage Relay: Fig. 1: Front PlateDokumen4 halamanBU1-AC - AC-voltage Relay: Fig. 1: Front PlateLászló MártonBelum ada peringkat
- CHAPTER 4 Source transformation-SVDokumen29 halamanCHAPTER 4 Source transformation-SVnurul najwaBelum ada peringkat
- SD 0100CT1902 Sec-16 PDFDokumen22 halamanSD 0100CT1902 Sec-16 PDFFerdi BayuBelum ada peringkat
- Wantong GeneratorDokumen8 halamanWantong GeneratorFloresBelum ada peringkat
- 307D, 311D, 312D, 315D, 319D, 320D, 323D, M313D, M315D, M316D, M318D, and M322D Excavators Ai R Conditioning Electrical SystemDokumen2 halaman307D, 311D, 312D, 315D, 319D, 320D, 323D, M313D, M315D, M316D, M318D, and M322D Excavators Ai R Conditioning Electrical SystemDed IvanovichBelum ada peringkat
- TPABDokumen7 halamanTPABnurvaniBelum ada peringkat
- Physics Chapter 11Dokumen18 halamanPhysics Chapter 11cryptachrisBelum ada peringkat
- Lundmark Sonja PHDDokumen123 halamanLundmark Sonja PHDZahra ShiraviBelum ada peringkat
- VC15B+/VC17B+ Digital Multimeter User Manual: NOT Exceed The "Maximum Value" Indicated in The SpecificationDokumen2 halamanVC15B+/VC17B+ Digital Multimeter User Manual: NOT Exceed The "Maximum Value" Indicated in The SpecificationDiegoM.ArdissoneBelum ada peringkat
- SyllabusDokumen2 halamanSyllabusAnonymous DuA3jEqUqBelum ada peringkat
- Electric Charges & Fields Question PaperDokumen6 halamanElectric Charges & Fields Question PaperBolt FFBelum ada peringkat
- Ma'Din Polytechnic College Malappuram: Department of Electrical & ElectronicsengineeringDokumen35 halamanMa'Din Polytechnic College Malappuram: Department of Electrical & ElectronicsengineeringUnais KKBelum ada peringkat
- Seismic Modeling and Incremental Dynamic Analysis of The ColdFormed Steel Framed CFS-NEES BuildingDokumen17 halamanSeismic Modeling and Incremental Dynamic Analysis of The ColdFormed Steel Framed CFS-NEES BuildingSohini MishraBelum ada peringkat
- Physics Study Guide Advanced VectorsDokumen2 halamanPhysics Study Guide Advanced VectorsCharles Miguel F. RalaBelum ada peringkat
- Electrical Interview QuestionsDokumen20 halamanElectrical Interview QuestionsramprakashpatelBelum ada peringkat
- Ee1351 PsaDokumen16 halamanEe1351 PsaStephen Kenth La GuerreBelum ada peringkat
- The Basics of Bolted JointsDokumen2 halamanThe Basics of Bolted Jointshitesh_tilalaBelum ada peringkat
- Electric Traction Systems ExplainedDokumen9 halamanElectric Traction Systems ExplainedAkshay SinghBelum ada peringkat
- Speakers Tech ReportDokumen8 halamanSpeakers Tech ReportSam JrBelum ada peringkat
- Vedantu Atomic StructureDokumen306 halamanVedantu Atomic StructureD. JAYA100% (1)
- Shindengen: (F8F60VX2)Dokumen13 halamanShindengen: (F8F60VX2)VictorManuelBernalBlancoBelum ada peringkat
- Anjali Jindal - Exp No.1 - Melde's ExperimentDokumen9 halamanAnjali Jindal - Exp No.1 - Melde's ExperimentyuhuBelum ada peringkat
- Circuits Notes and Qs Package - FinalDokumen17 halamanCircuits Notes and Qs Package - FinalRaymond ChanBelum ada peringkat
- Ideal voltage and current sourcesDokumen1 halamanIdeal voltage and current sourcesSangita PanigrahiBelum ada peringkat
- Load Combinations Book EC3Dokumen29 halamanLoad Combinations Book EC3blueswan100% (1)
- Motion of A Charged Particle in Electric and Magnetic Fields 2Dokumen12 halamanMotion of A Charged Particle in Electric and Magnetic Fields 2Dinesh KatochBelum ada peringkat
- Gen Physics q2 Module 1Dokumen3 halamanGen Physics q2 Module 1Lawrence Sean MotinBelum ada peringkat
- Physics Handbook by DishaDokumen9 halamanPhysics Handbook by DishaShubham kumarBelum ada peringkat