Anda mungkin juga menyukai
- Clase 11 Análisis de La Respuesta en El Tiempo Usando Matlab PDFDokumen25 halamanClase 11 Análisis de La Respuesta en El Tiempo Usando Matlab PDFMarvinJosephDeLaCruzAntaurcoBelum ada peringkat
- Controlar Motores de Corriente Continua Con Puente H PDFDokumen7 halamanControlar Motores de Corriente Continua Con Puente H PDFOscar David MamaniBelum ada peringkat
- Guía ABP1: Acceso A Datos en Un Instrumento Inteligente Evaluación Sumativa 1Dokumen4 halamanGuía ABP1: Acceso A Datos en Un Instrumento Inteligente Evaluación Sumativa 1333333333-570028Belum ada peringkat
- Basico PF 755Dokumen31 halamanBasico PF 755Ronald Suriaga AuthemanBelum ada peringkat
- Apuntes de EjerciciosDokumen41 halamanApuntes de EjerciciosAlejandro MorenoBelum ada peringkat
- Semana 4 PDFDokumen20 halamanSemana 4 PDFParrillas del SolBelum ada peringkat
- Semiconductores Tipo N y Tipo PDokumen3 halamanSemiconductores Tipo N y Tipo PHumberto Almeida AlmeidaBelum ada peringkat
- Factory Io Ai - AutomatizacionDokumen10 halamanFactory Io Ai - Automatizacionanon_734712707Belum ada peringkat
- Metodo Paso A PasoDokumen10 halamanMetodo Paso A PasoYuritzi GuarnerosBelum ada peringkat
- Dimensionamiento de ConductoresDokumen1 halamanDimensionamiento de Conductoreselectroramos2011100% (1)
- Instrumentación INTELIGENTEDokumen30 halamanInstrumentación INTELIGENTEpablosky33Belum ada peringkat
- Guia N 2 Funcion de Transferencia y Diagramas de BloquesDokumen10 halamanGuia N 2 Funcion de Transferencia y Diagramas de Bloquesicepolo100% (1)
- Guia Rapida de Lenguaje SQL Cuaderno de Diapositivas 1z0-051Dokumen221 halamanGuia Rapida de Lenguaje SQL Cuaderno de Diapositivas 1z0-051perhackerBelum ada peringkat
- Que Usos Tienen Las Radiaciones IonizantesDokumen19 halamanQue Usos Tienen Las Radiaciones IonizantesJose Luis Mamani TturoBelum ada peringkat
- Capacitacion Fatek y WeintekDokumen16 halamanCapacitacion Fatek y WeintekAlexsander Vasquez100% (1)
- Propuesta1 - Diseño de Un Potenciostato Automatizado - SequeraDokumen20 halamanPropuesta1 - Diseño de Un Potenciostato Automatizado - Sequerajhon fernando castro100% (1)
- Control de Nivel Usando El PLC Siemens12Dokumen14 halamanControl de Nivel Usando El PLC Siemens12franco_3210_100% (1)
- E-322 Final-Mod1 PLC AvanzadoDokumen130 halamanE-322 Final-Mod1 PLC AvanzadoHéctor CaríasBelum ada peringkat
- RS MK - II Español..Dokumen20 halamanRS MK - II Español..Fernando Javier LeivaBelum ada peringkat
- PTT Metodo CascadaDokumen13 halamanPTT Metodo CascadaSANTIAGO DAMASO RODRIGUEZ MARTINEZBelum ada peringkat
- Sistema de VisionDokumen10 halamanSistema de VisionAnonymous 9Y72lKQxxzBelum ada peringkat
- Adquisición y Análisis Una Señal Con NI MyRIODokumen10 halamanAdquisición y Análisis Una Señal Con NI MyRIOEric LilloBelum ada peringkat
- Manual de Referencia Del Conjunto de Instrucciones Generales PLC Logix 5000Dokumen400 halamanManual de Referencia Del Conjunto de Instrucciones Generales PLC Logix 5000seduch100% (1)
- Manual de LabviewDokumen19 halamanManual de LabviewBecks Pio PioBelum ada peringkat
- Catalogo Megger BT Email ES 2014 V04Dokumen40 halamanCatalogo Megger BT Email ES 2014 V04Luis Alonso Sanchez LungBelum ada peringkat
- Curso Electronica IndustrialDokumen688 halamanCurso Electronica IndustrialjoserobertosolanoBelum ada peringkat
- Capitulo 8Dokumen4 halamanCapitulo 8Victor Manuel Sanchez ChaparroBelum ada peringkat
- Guía de Actividades y Rúbrica de Evaluación - Fase 1 - Presentar Solución Al Problema Del Interruptor CrepuscularDokumen13 halamanGuía de Actividades y Rúbrica de Evaluación - Fase 1 - Presentar Solución Al Problema Del Interruptor CrepuscularomarBelum ada peringkat
- Espacio de EstadosDokumen59 halamanEspacio de Estadosjzerox5Belum ada peringkat
- Variador de FrecuenciaDokumen7 halamanVariador de FrecuenciaOscar David PérezBelum ada peringkat
- Interfaz Humano MaquinaDokumen4 halamanInterfaz Humano MaquinaJuan Flores GarciaBelum ada peringkat
- AscensorDokumen6 halamanAscensorfernando0% (1)
- 1 Tarea 4 Semestre (Automatización y PLC)Dokumen30 halaman1 Tarea 4 Semestre (Automatización y PLC)Jose Dirseu Lopez ReyesBelum ada peringkat
- Vision ArtificialDokumen23 halamanVision ArtificialNatalia G LazcanoBelum ada peringkat
- Reporte Señal Analogica A DigitalDokumen17 halamanReporte Señal Analogica A DigitalOmar RodriguezBelum ada peringkat
- Sistemas Secuenciales 1 PDFDokumen86 halamanSistemas Secuenciales 1 PDFJuan Diego Márquez ChávezBelum ada peringkat
- Grafcet&GemmaDokumen23 halamanGrafcet&GemmaVictor CarlosBelum ada peringkat
- Departamento de Eléctrica Y ElectrónicaDokumen46 halamanDepartamento de Eléctrica Y ElectrónicaErickBelum ada peringkat
- Instrumentación Electrónica ClasesDokumen39 halamanInstrumentación Electrónica ClasesNetonu NunezBelum ada peringkat
- Información y Estado de Los Controladores Logix5000Dokumen56 halamanInformación y Estado de Los Controladores Logix5000Erik Jacome0% (1)
- PLC AvanzadoDokumen32 halamanPLC AvanzadoCristian Giovanni Gomez ParadaBelum ada peringkat
- Automatizacion y Control de Procesos Con PLCDokumen42 halamanAutomatizacion y Control de Procesos Con PLCElectricidad Practica InicialBelum ada peringkat
- Guía de La Aparamenta de Media TensiónDokumen28 halamanGuía de La Aparamenta de Media TensiónRodrigoBelum ada peringkat
- Proyecto Capstone PDFDokumen8 halamanProyecto Capstone PDFPAOLO ANGELLO TORRES MALAGABelum ada peringkat
- Sistemas Digitales II EspolDokumen4 halamanSistemas Digitales II EspolByron MotocheBelum ada peringkat
- Proyecto Montaje de Controles Electricos Con Logica CableadaDokumen6 halamanProyecto Montaje de Controles Electricos Con Logica CableadaRicardo MariscalBelum ada peringkat
- Practica 01 - FluidSim - NeumaticaDokumen8 halamanPractica 01 - FluidSim - NeumaticaMusic Anime0% (1)
- Control de Procesos Por Ordenador (Tema 68)Dokumen16 halamanControl de Procesos Por Ordenador (Tema 68)ppcoletoBelum ada peringkat
- InfoPLC Net Tutorial Redes Profibus DP 2Dokumen35 halamanInfoPLC Net Tutorial Redes Profibus DP 2Giancarlo PossumBelum ada peringkat
- Simatic St70n Complete Spanish 2010-04Dokumen296 halamanSimatic St70n Complete Spanish 2010-04andres334Belum ada peringkat
- Diseño de Un Estacionamiento Vertical AutomatizadoDokumen5 halamanDiseño de Un Estacionamiento Vertical AutomatizadoRicardo L Núñez Ramirez100% (1)
- Trabajo de InstrumentacionDokumen10 halamanTrabajo de Instrumentacionfaber orlandoBelum ada peringkat
- DIODODokumen4 halamanDIODOHenry Quispe ChoqueBelum ada peringkat
- INTRODUCCION A LOS PLC - v12Dokumen28 halamanINTRODUCCION A LOS PLC - v12Ing. Bendryx BelloBelum ada peringkat
- If Con Python - TaggedDokumen14 halamanIf Con Python - TaggedMATIAS BENJAMIN BALTAZAR ALARCON ORELLANABelum ada peringkat
- TFG - Codesys - Antonio - Garcia - RodriguezDokumen85 halamanTFG - Codesys - Antonio - Garcia - RodriguezJavier Alexander Ramírez NietoBelum ada peringkat
- Laboratorio 1 Modelado y SimulacionDokumen8 halamanLaboratorio 1 Modelado y SimulacionMireya NacevillaBelum ada peringkat
- Motor CC Con PIDfinalDokumen11 halamanMotor CC Con PIDfinalLuis ToledoBelum ada peringkat
- Laboratorio 1 Modelado y Simulacion 4278 y 4281Dokumen7 halamanLaboratorio 1 Modelado y Simulacion 4278 y 4281Cesar BautistaBelum ada peringkat
- PROYFINAL 2 Ing Control Upb 2 - 2021 - INTENSIDAD DE LUZDokumen6 halamanPROYFINAL 2 Ing Control Upb 2 - 2021 - INTENSIDAD DE LUZSantiago Farías CamargoBelum ada peringkat
- Deber 2Dokumen2 halamanDeber 2Franklin Bravo ChufelizBelum ada peringkat
- Plantilla para La Preparación de Atículos Con Normas IEEE (December 2016)Dokumen9 halamanPlantilla para La Preparación de Atículos Con Normas IEEE (December 2016)Alex LozadoBelum ada peringkat
- CLS500Dokumen8 halamanCLS500Carlos NedvedBelum ada peringkat
- Cambio de Base BravoDokumen2 halamanCambio de Base BravoFranklin Bravo ChufelizBelum ada peringkat
- Universidad de Las Fuerzas Armadas - Espe: Ing. Luis OrozcoDokumen3 halamanUniversidad de Las Fuerzas Armadas - Espe: Ing. Luis OrozcoFranklin Bravo ChufelizBelum ada peringkat
- Deber 1Dokumen3 halamanDeber 1Franklin Bravo ChufelizBelum ada peringkat
- Caracteristicas de Los FPGADokumen9 halamanCaracteristicas de Los FPGAFranklin Bravo ChufelizBelum ada peringkat
- Guia - Laboratorio 1 de Electrónica NuevaDokumen37 halamanGuia - Laboratorio 1 de Electrónica NuevaduvanBelum ada peringkat
- Operaciones 2102Dokumen2 halamanOperaciones 2102Franklin Bravo ChufelizBelum ada peringkat
- Avo Vasquez Carranco ejercicioFlipFlop 2102Dokumen9 halamanAvo Vasquez Carranco ejercicioFlipFlop 2102Franklin Bravo ChufelizBelum ada peringkat
- Sesion 3 Modelos MatDokumen16 halamanSesion 3 Modelos MatFranklin Bravo ChufelizBelum ada peringkat
- Caracteristicas de Los FPGADokumen9 halamanCaracteristicas de Los FPGAFranklin Bravo ChufelizBelum ada peringkat
- SilaboDokumen4 halamanSilaboFranklin Bravo ChufelizBelum ada peringkat
- Grupo2 Informe N9Dokumen7 halamanGrupo2 Informe N9Franklin Bravo ChufelizBelum ada peringkat
- Ejercicios Flyback ForwardDokumen3 halamanEjercicios Flyback ForwardFranklin Bravo ChufelizBelum ada peringkat
- Proyecto DigitalesDokumen4 halamanProyecto DigitalesFranklin Bravo ChufelizBelum ada peringkat
- Modelado y SimulacionDokumen9 halamanModelado y SimulacionFranklin Bravo ChufelizBelum ada peringkat
- Deber 1Dokumen3 halamanDeber 1Franklin Bravo ChufelizBelum ada peringkat
- Reporte Sumador GlezDokumen22 halamanReporte Sumador GlezjoseBelum ada peringkat
- Analisis MatematicoDokumen8 halamanAnalisis MatematicoFranklin Bravo ChufelizBelum ada peringkat
- Guiaw1 InstDokumen6 halamanGuiaw1 InstFranklin Bravo ChufelizBelum ada peringkat
- Analisis MatematicoDokumen8 halamanAnalisis MatematicoFranklin Bravo ChufelizBelum ada peringkat
- Deber 2Dokumen5 halamanDeber 2Franklin Bravo ChufelizBelum ada peringkat
- Preparatorio 2.3.tablaDokumen2 halamanPreparatorio 2.3.tablaFranklin Bravo ChufelizBelum ada peringkat
- Informe Guerra DuqueDokumen24 halamanInforme Guerra DuqueFreddy DuqueBelum ada peringkat
- CI Clase 3.0 Laboratorio 2.3Dokumen3 halamanCI Clase 3.0 Laboratorio 2.3Franklin Bravo ChufelizBelum ada peringkat
- Proceso de Llenado Automatico de Envases Clasificado Por ColorDokumen4 halamanProceso de Llenado Automatico de Envases Clasificado Por ColorFranklin Bravo ChufelizBelum ada peringkat
- Hoja de DatosDokumen1 halamanHoja de DatosFranklin Bravo ChufelizBelum ada peringkat
- Qué Es Una ComputadoraDokumen1 halamanQué Es Una ComputadoraSagitario GutierrexBelum ada peringkat
- Mapa de Memoria de Un ProcesoDokumen13 halamanMapa de Memoria de Un ProcesoAngel Leonardo Guemez RodriguezBelum ada peringkat
- Informe Final Lab 2 Grupo VDokumen19 halamanInforme Final Lab 2 Grupo VJacky SierasBelum ada peringkat
- Definiciones y Parametros de CircuitosDokumen31 halamanDefiniciones y Parametros de Circuitosluialarcon2175% (4)
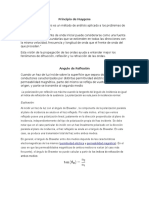
- Principio de HuygensDokumen4 halamanPrincipio de HuygensMauro Jesús Zambrana CastroBelum ada peringkat
- Sistema IT MDokumen36 halamanSistema IT Momar100% (2)
- Merge SortDokumen2 halamanMerge SortNabil PerozoBelum ada peringkat
- Taller Base de DatosDokumen5 halamanTaller Base de DatosAngelReyBelum ada peringkat
- Caso InternacionalDokumen5 halamanCaso InternacionalRosy CucBelum ada peringkat
- Administracion de MemoriaSistemasRecientesDokumen23 halamanAdministracion de MemoriaSistemasRecientesEhox EdehBelum ada peringkat
- E1 Plus 1Dokumen2 halamanE1 Plus 1daroltecBelum ada peringkat
- Manual Generador CramacoDokumen29 halamanManual Generador CramacoAna100% (3)
- Practica 1 Circuitos Electricos y ElectronicosDokumen10 halamanPractica 1 Circuitos Electricos y ElectronicosJúnior Jose Solano RKS100% (1)
- TransitoresDokumen10 halamanTransitoreslelopolisBelum ada peringkat
- Teoria ImagenesDokumen15 halamanTeoria ImagenesDennis BurgasiBelum ada peringkat
- Or. Aut. Ind Findesem 22.10.22Dokumen17 halamanOr. Aut. Ind Findesem 22.10.22KEVIN ECOS ALABelum ada peringkat
- Semaforo Compuertas LogicasDokumen2 halamanSemaforo Compuertas LogicasANDRES ALVAREZBelum ada peringkat
- Protocolo ELECTRICASDokumen2 halamanProtocolo ELECTRICASwintermacBelum ada peringkat
- Guia Primeros Pasos Con Un SSDDokumen37 halamanGuia Primeros Pasos Con Un SSDRainoxBelum ada peringkat
- Aplicacion RealDokumen6 halamanAplicacion RealIsai German Paulin P.Belum ada peringkat
- Catalogo Equipos Control en Linea de ProcesoDokumen124 halamanCatalogo Equipos Control en Linea de ProcesoGBastidas BastidasBelum ada peringkat
- 001-Manual Control PatrimonialDokumen38 halaman001-Manual Control PatrimonialFlavio Esteban Quispe BolañosBelum ada peringkat
- Apuntes de Control Numerico UABC PDFDokumen58 halamanApuntes de Control Numerico UABC PDFArmando Corral BlancoBelum ada peringkat
- Ficha 1 de Medidas ElectricasDokumen4 halamanFicha 1 de Medidas ElectricasSergiooBelum ada peringkat
- Power DriveDokumen8 halamanPower DriveYaroslav RuizBelum ada peringkat
- Diodos Emisores de LuzDokumen6 halamanDiodos Emisores de Luzaarevalo612Belum ada peringkat
- Curso de TransformadoresDokumen88 halamanCurso de TransformadoresCARLOS LÓPEZBelum ada peringkat
- 7 - Carga y Descarga de Un CapacitorDokumen8 halaman7 - Carga y Descarga de Un CapacitorWILD DIETMAR FABRISHIO RIVEROS PERALTA0% (1)
- Hidraulica BasicaDokumen124 halamanHidraulica BasicaKatha VargasBelum ada peringkat
- Transformadores de Medida y ProteccionDokumen25 halamanTransformadores de Medida y ProteccionGerardo SánchezBelum ada peringkat