Anda mungkin juga menyukai
- Introduction to Hybrid Vehicle System Modeling and ControlDari EverandIntroduction to Hybrid Vehicle System Modeling and ControlPenilaian: 4 dari 5 bintang4/5 (1)
- Functional Safety Considerations in Battery DesignDokumen6 halamanFunctional Safety Considerations in Battery DesignMarian VerdeBelum ada peringkat
- iHorizon-Enabled Energy Management for Electrified VehiclesDari EverandiHorizon-Enabled Energy Management for Electrified VehiclesBelum ada peringkat
- Fully Autonomous Vehicles: Visions of the future or still reality?Dari EverandFully Autonomous Vehicles: Visions of the future or still reality?Belum ada peringkat
- Battery Management Systems For Electric VehiclesDokumen23 halamanBattery Management Systems For Electric VehiclesMohammad Tufail Safdar100% (5)
- Battery Management Systems of Electric and Hybrid Electric VehiclesDokumen148 halamanBattery Management Systems of Electric and Hybrid Electric VehiclesFranco Angelo Regencia100% (2)
- Modeling, Dynamics, and Control of Electrified VehiclesDari EverandModeling, Dynamics, and Control of Electrified VehiclesPenilaian: 5 dari 5 bintang5/5 (1)
- Advanced Battery Management Technologies for Electric VehiclesDari EverandAdvanced Battery Management Technologies for Electric VehiclesBelum ada peringkat
- Introduction To Electric Vehicle Battery Systems - Technical ArticlesDokumen5 halamanIntroduction To Electric Vehicle Battery Systems - Technical ArticlesMoorthy subramanianBelum ada peringkat
- Battery Modelling Rev6 CompleteDokumen25 halamanBattery Modelling Rev6 Completedoowh100% (1)
- Battery Management System A Complete Guide - 2019 EditionDari EverandBattery Management System A Complete Guide - 2019 EditionBelum ada peringkat
- What A Teardown of The Latest Electric Vehicles Reveals About The Future of Mass Market EVs PDFDokumen11 halamanWhat A Teardown of The Latest Electric Vehicles Reveals About The Future of Mass Market EVs PDFSupriya ShahBelum ada peringkat
- Trends in Electric PropulsionDokumen3 halamanTrends in Electric PropulsionggpalomiBelum ada peringkat
- Battery management system Complete Self-Assessment GuideDari EverandBattery management system Complete Self-Assessment GuideBelum ada peringkat
- Electric VehiclesDokumen15 halamanElectric VehiclesJai ChawlaBelum ada peringkat
- Lithium Ion Batteries in e MobilityDokumen41 halamanLithium Ion Batteries in e MobilityArun VirBelum ada peringkat
- 3kw DCDC Converter For Electric VehicleDokumen82 halaman3kw DCDC Converter For Electric VehicleAli BaniamerianBelum ada peringkat
- Electric Vehicle Certification CourseDokumen8 halamanElectric Vehicle Certification CourseDIYguruBelum ada peringkat
- Ford Battery Electric VehicleDokumen1 halamanFord Battery Electric VehicleFord Motor Company67% (3)
- Sensors Used in HEVDokumen4 halamanSensors Used in HEVvishiwizard100% (1)
- Automotive Battery Management System (BMS) Using State-of-Charge (SOC) EstimationDokumen55 halamanAutomotive Battery Management System (BMS) Using State-of-Charge (SOC) EstimationUchenna Adimmadu100% (1)
- Multicell 36V To 48V Battery Management System Reference DesignDokumen37 halamanMulticell 36V To 48V Battery Management System Reference DesignkarkeraBelum ada peringkat
- EV Design & Modelling PDFDokumen25 halamanEV Design & Modelling PDFJhangir DesfrandantaBelum ada peringkat
- Power of BatteriesDokumen13 halamanPower of BatteriesancientasmBelum ada peringkat
- Electric Hybrid Vehicle Technology International 2011Dokumen211 halamanElectric Hybrid Vehicle Technology International 2011Juan Carlos Regalado Anguiano100% (1)
- Optimisation of Fuel Cell and Supercapacitors in ElectricDokumen38 halamanOptimisation of Fuel Cell and Supercapacitors in ElectricNithin JohnBelum ada peringkat
- Hybrid Powertrain SolutionsDokumen27 halamanHybrid Powertrain SolutionsmohamedezeldinBelum ada peringkat
- New Trends and Recent Developments in Automotive Engineering PDFDokumen13 halamanNew Trends and Recent Developments in Automotive Engineering PDFRohinton PaulBelum ada peringkat
- Electric Vehicles: By: Ali Tariq BBA-6Dokumen27 halamanElectric Vehicles: By: Ali Tariq BBA-6AliTariqBelum ada peringkat
- Williamson - Energy Management Strategies For Electric and Plug-In Hybrid Electric Vehicles (2013) PDFDokumen263 halamanWilliamson - Energy Management Strategies For Electric and Plug-In Hybrid Electric Vehicles (2013) PDFatirina100% (1)
- Electric VehicleDokumen33 halamanElectric VehicleJatin Goel100% (1)
- The Conversion of A Hybrid Electric Vehicle Into A Plug in Hybrid Electric VehicleDokumen10 halamanThe Conversion of A Hybrid Electric Vehicle Into A Plug in Hybrid Electric VehicleEmanuel PopaBelum ada peringkat
- Shekhar Malani - BMS For EVDokumen19 halamanShekhar Malani - BMS For EVvarun sharma100% (1)
- Battery Pack Modeling and BMSDokumen24 halamanBattery Pack Modeling and BMSAnonymous tzIXaHx1Belum ada peringkat
- Design of Electric VehicleDokumen13 halamanDesign of Electric VehicleIJAERS JOURNALBelum ada peringkat
- 01 - Electric Powertrain Structures BaseDokumen4 halaman01 - Electric Powertrain Structures BaseElectrical-EngineerBelum ada peringkat
- Battery Management SystemDokumen43 halamanBattery Management SystemAditya PatilBelum ada peringkat
- C0904 091814 PDFDokumen54 halamanC0904 091814 PDFBuddy JohnsonBelum ada peringkat
- KPIT PresentationDokumen18 halamanKPIT PresentationAmitkumar GundadBelum ada peringkat
- Battery Electric Vehicles in PracticeDokumen83 halamanBattery Electric Vehicles in Practiceramazan costuBelum ada peringkat
- Ethernet@Automotive Webinar Series: Introduction To Ethernet and IP in Automotive VehiclesDokumen36 halamanEthernet@Automotive Webinar Series: Introduction To Ethernet and IP in Automotive Vehiclesaulin64_845645735Belum ada peringkat
- Accenture Electric Vehicle ChallengeDokumen16 halamanAccenture Electric Vehicle ChallengeabishakekoulBelum ada peringkat
- Automotive BatteryDokumen25 halamanAutomotive BatteryRichard I. de la CruzBelum ada peringkat
- The Shift To Electric VehiclesDokumen20 halamanThe Shift To Electric VehiclesKal GyimesiBelum ada peringkat
- Advancxed EV Battery ManagementDokumen51 halamanAdvancxed EV Battery ManagementgoteslaBelum ada peringkat
- HEV EV ArchitectureDokumen48 halamanHEV EV ArchitectureConstantin Teodor ArdeiuBelum ada peringkat
- Advanced Hybrid and Electric Vehicles System Optimization and Vehicle Integration by Michael NikowitzDokumen230 halamanAdvanced Hybrid and Electric Vehicles System Optimization and Vehicle Integration by Michael NikowitzThuận Vũ Đình100% (2)
- A Detailed Analysis of Electric Vehicle Technology Advancements and Future ProspectsDokumen10 halamanA Detailed Analysis of Electric Vehicle Technology Advancements and Future ProspectsIJRASETPublicationsBelum ada peringkat
- Automotive Battery TechnologyDokumen134 halamanAutomotive Battery Technologyoceanforest100% (4)
- Infineon-EiceDRIVER Gate Driver ICs-ProductSelectionGuide-v01 01-ENDokumen84 halamanInfineon-EiceDRIVER Gate Driver ICs-ProductSelectionGuide-v01 01-ENhafizimtiazBelum ada peringkat
- Hybrid Electric VehiclesDokumen144 halamanHybrid Electric VehiclesElias Iruela75% (4)
- Vehicle ElectrificationDokumen30 halamanVehicle ElectrificationSteve B. SalongaBelum ada peringkat
- Calculation of Charge and Health Status Condition in Battery Electric VehicleDokumen3 halamanCalculation of Charge and Health Status Condition in Battery Electric VehicleInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Combined Charging System 1 0 Specification V1 2 1Dokumen16 halamanCombined Charging System 1 0 Specification V1 2 1TrườngGiang DươngBelum ada peringkat
- Battery Management System For Future Electric Vehicles PeukertDokumen156 halamanBattery Management System For Future Electric Vehicles Peukertumunera2997Belum ada peringkat
- Overview of Electric Vehicles EVs and EV SensorsDokumen17 halamanOverview of Electric Vehicles EVs and EV Sensorsuttam pundirBelum ada peringkat
- 2015 VW Golf GTE PlugDokumen4 halaman2015 VW Golf GTE Plughicham100% (1)
- PummerDokumen3 halamanPummerAwangku Saiful FikriBelum ada peringkat
- PG 108 - Fig 3 - 12V Battery Absorb - Component Layout - Sep 15Dokumen1 halamanPG 108 - Fig 3 - 12V Battery Absorb - Component Layout - Sep 15Ryn YahuFBelum ada peringkat
- Cable Modem External With USB Installation GuideDokumen1 halamanCable Modem External With USB Installation Guidebgomes2807179Belum ada peringkat
- Stc12c5616ad enDokumen377 halamanStc12c5616ad enMuhammadHaroonBelum ada peringkat
- MX5000Dokumen8 halamanMX5000Alan PredmoreBelum ada peringkat
- KBU1010 DatasheetDokumen3 halamanKBU1010 DatasheetpandilzoBelum ada peringkat
- Twin Loop Treasure Seeker: Robert and David CroneDokumen5 halamanTwin Loop Treasure Seeker: Robert and David CronesafdsfdBelum ada peringkat
- Sanken Ic For Led Lighting SG PDFDokumen26 halamanSanken Ic For Led Lighting SG PDFHarshit TyagiBelum ada peringkat
- H 2005 0093Dokumen2 halamanH 2005 0093ramaseanBelum ada peringkat
- Iptv Over PonDokumen5 halamanIptv Over Ponchaidar_lakareBelum ada peringkat
- Board Intel DG41WV 2Dokumen34 halamanBoard Intel DG41WV 2lorenahoyosBelum ada peringkat
- Ccna 3Dokumen64 halamanCcna 3lynjazmin abalusBelum ada peringkat
- Design and Simulation of UART Serial Communication Module Based On VHDLDokumen4 halamanDesign and Simulation of UART Serial Communication Module Based On VHDLJohn RamaraoBelum ada peringkat
- Lec 18 Low PowerDokumen24 halamanLec 18 Low PowerRahul PanwarBelum ada peringkat
- Tea 6843Dokumen62 halamanTea 6843Cordoba InyecciónBelum ada peringkat
- Inovonics Configuration Guide v2.0Dokumen20 halamanInovonics Configuration Guide v2.0vballricanBelum ada peringkat
- ES9038Q2M Datasheet v1.4Dokumen65 halamanES9038Q2M Datasheet v1.4Thắng NguyễnBelum ada peringkat
- Stamford As440Dokumen4 halamanStamford As440Manuel OteroBelum ada peringkat
- Audio Video Systems Lab Manual PDFDokumen47 halamanAudio Video Systems Lab Manual PDFAnkita Vaghela100% (3)
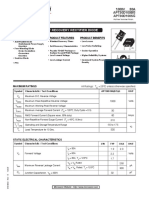
- Ultrafast Soft Recovery Rectifier Diode: Product Benefits Product Features Product ApplicationsDokumen4 halamanUltrafast Soft Recovery Rectifier Diode: Product Benefits Product Features Product ApplicationsEDER RIBEIROBelum ada peringkat
- Acer Aspire E5 573 39hc Da0zrtmb6d0 Rev 3a ShemaDokumen44 halamanAcer Aspire E5 573 39hc Da0zrtmb6d0 Rev 3a ShemaEmerson VieiraBelum ada peringkat
- CS 211: Computer Architecture: Instructor: Prof. Bhagi NarahariDokumen82 halamanCS 211: Computer Architecture: Instructor: Prof. Bhagi NarahariElizabeth AliazBelum ada peringkat
- Module DatasheetDokumen2 halamanModule DatasheetaadilBelum ada peringkat
- CISE414 - Unit 04 AVR Atmega PortsDokumen30 halamanCISE414 - Unit 04 AVR Atmega Portsمحمد حمدBelum ada peringkat
- Transformer IIDokumen10 halamanTransformer IIPabitraranjan DasBelum ada peringkat
- Circuit Logic User GuideDokumen59 halamanCircuit Logic User Guideঅন্তরআত্মারসন্ধানে100% (1)
- Lab 8: D A AC C: Iode S Lipper IrcuitDokumen8 halamanLab 8: D A AC C: Iode S Lipper IrcuitMuhammad Nauman ZakkiBelum ada peringkat
- Diagrama CDXM8800 Black PanelDokumen60 halamanDiagrama CDXM8800 Black PanelangelowowBelum ada peringkat
- PHYSICAL ONLY CELLS - VLSI - Physical Design For FreshersDokumen14 halamanPHYSICAL ONLY CELLS - VLSI - Physical Design For FreshersRA NDYBelum ada peringkat
- Density Based Traffic Light Control System Report (Rough)Dokumen19 halamanDensity Based Traffic Light Control System Report (Rough)Kunal AdhikariBelum ada peringkat