Anda mungkin juga menyukai
- Topics in Stochastic Processes: Probability and Mathematical Statistics: A Series of Monographs and TextbooksDari EverandTopics in Stochastic Processes: Probability and Mathematical Statistics: A Series of Monographs and TextbooksBelum ada peringkat
- Handbook of Operational Amplifier ApplicationsDokumen94 halamanHandbook of Operational Amplifier Applicationshermiit89% (9)
- Low Pass FilterDokumen12 halamanLow Pass Filterzamarak kasi50% (2)
- Cmos Analog Ic Design Course Plan NewDokumen9 halamanCmos Analog Ic Design Course Plan Newjim2001Belum ada peringkat
- Automatic Control Systems Characteristic EquationsDokumen232 halamanAutomatic Control Systems Characteristic EquationsKenneth JaraBelum ada peringkat
- Dytran Documentation TheoryDokumen35 halamanDytran Documentation TheoryGeorges KouroussisBelum ada peringkat
- Structural Analysis and Design: Some Microcomputer ApplicationsDari EverandStructural Analysis and Design: Some Microcomputer ApplicationsPenilaian: 3.5 dari 5 bintang3.5/5 (3)
- Gain, Phase margins, compensatorsDokumen10 halamanGain, Phase margins, compensatorszakiannuarBelum ada peringkat
- Control System Lab ReportDokumen41 halamanControl System Lab ReportEngr-Junaid Mukhtar33% (3)
- Course Description: Introduction, Modeling of Dynamical Systems, Time-Domain Analysis, FrequencyDokumen2 halamanCourse Description: Introduction, Modeling of Dynamical Systems, Time-Domain Analysis, FrequencyCoalescence BITSBelum ada peringkat
- Banasthali University Department of Electronics Course Handout Class: B.Tech. (EC) 6 SemDokumen2 halamanBanasthali University Department of Electronics Course Handout Class: B.Tech. (EC) 6 SemVipan SharmaBelum ada peringkat
- Lect. No. Topic Learning Object(s) Ref. To Text Book/ Class NotesDokumen2 halamanLect. No. Topic Learning Object(s) Ref. To Text Book/ Class Notessaurjyesh nayakBelum ada peringkat
- Ece327: Control System Engineering: Course Context and Overview (100 Words)Dokumen3 halamanEce327: Control System Engineering: Course Context and Overview (100 Words)raghav dhamaniBelum ada peringkat
- BITS Pilani Modern Control Systems Course DetailsDokumen2 halamanBITS Pilani Modern Control Systems Course DetailsSrinivasan M PBelum ada peringkat
- Control System Engineering - FinalDokumen2 halamanControl System Engineering - FinalLuciferBelum ada peringkat
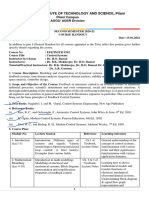
- Birla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionDokumen3 halamanBirla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionVibgyor SinghviBelum ada peringkat
- Eceeeeinstr F242 Control Systems - HandoutDokumen3 halamanEceeeeinstr F242 Control Systems - HandoutShashank KumarBelum ada peringkat
- VAAGDEVI ENGINEERING COLLEGE TEACHING SCHEDULESDokumen15 halamanVAAGDEVI ENGINEERING COLLEGE TEACHING SCHEDULESLaxmiKrishnaBelum ada peringkat
- LCS Linear Control SystemsDokumen4 halamanLCS Linear Control Systemsosmmamhnk66Belum ada peringkat
- CONSYSDokumen3 halamanCONSYSADITYA MATHURBelum ada peringkat
- Final Lesson Plan Cs TheoryDokumen16 halamanFinal Lesson Plan Cs TheoryKrushnasamy SuramaniyanBelum ada peringkat
- MATHF112 Math2Dokumen2 halamanMATHF112 Math2Yash BhardwajBelum ada peringkat
- 3.syllabus RubricsDokumen5 halaman3.syllabus RubricsSomesh MuruganBelum ada peringkat
- 6 Semester: Institute of Engineering & ManagementDokumen40 halaman6 Semester: Institute of Engineering & ManagementManohar PBelum ada peringkat
- Endris, Int - Control EDokumen2 halamanEndris, Int - Control EMagarsaa Qana'iiBelum ada peringkat
- Computational Technique in Civil EngineeringDokumen3 halamanComputational Technique in Civil EngineeringAnil MarsaniBelum ada peringkat
- SyllabusDokumen2 halamanSyllabusHarshit SachdevBelum ada peringkat
- Modern Control Theory State Space ModelsDokumen3 halamanModern Control Theory State Space ModelsNayan KumarBelum ada peringkat
- Birla Institute of Technology and Science, Pilani - K.K. Birla Goa CampusDokumen2 halamanBirla Institute of Technology and Science, Pilani - K.K. Birla Goa CampusHritik Vinayak LalBelum ada peringkat
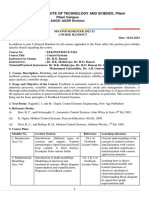
- Birla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionDokumen3 halamanBirla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionVIVEK MANI TRIPATHIBelum ada peringkat
- UMP Discrete Math & Linear Algebra Course ScheduleDokumen2 halamanUMP Discrete Math & Linear Algebra Course Schedule一鸿Belum ada peringkat
- CONTROL ENGINEERING COURSE FILEDokumen11 halamanCONTROL ENGINEERING COURSE FILEPRAKASH SBelum ada peringkat
- Discrete Control SystemsDokumen4 halamanDiscrete Control SystemsVijay PrabhuBelum ada peringkat
- TH THDokumen2 halamanTH THranjani093Belum ada peringkat
- Lesson Plan: Learning Topics To Be CoveredDokumen3 halamanLesson Plan: Learning Topics To Be CoveredMD SELIM SAROWARBelum ada peringkat
- Ii I SS Unit IDokumen88 halamanIi I SS Unit IRaja ReddyBelum ada peringkat
- EE 340 Control Systems SyllabusDokumen3 halamanEE 340 Control Systems Syllabusanon_897005027Belum ada peringkat
- EE-371 Linear Control Systems First Day HandoutDokumen4 halamanEE-371 Linear Control Systems First Day HandoutMaham AslamBelum ada peringkat
- Eee3001 Control-Systems Eth 1.0 37 Eee3001Dokumen3 halamanEee3001 Control-Systems Eth 1.0 37 Eee3001dhoniBelum ada peringkat
- 7-8 - Syllabus 2018-22Dokumen45 halaman7-8 - Syllabus 2018-22Hemanth LBelum ada peringkat
- Control SystemsDokumen2 halamanControl SystemsrahulwasthereBelum ada peringkat
- Control+system Lesson+planDokumen6 halamanControl+system Lesson+planNarasimman DonBelum ada peringkat
- Digital Design Course HandoutDokumen4 halamanDigital Design Course HandoutShubham RohilaBelum ada peringkat
- BITS F312 HandoutDokumen2 halamanBITS F312 HandoutPranath ReddyBelum ada peringkat
- ME 474 Automatic Control Spring 2020Dokumen6 halamanME 474 Automatic Control Spring 2020aziz DeganiBelum ada peringkat
- Engineering Mathematics I: Tutorial: Practical: Course Objectives: YearDokumen27 halamanEngineering Mathematics I: Tutorial: Practical: Course Objectives: YearPappu ThakurBelum ada peringkat
- PDC HandoutDokumen3 halamanPDC Handoutf20212587Belum ada peringkat
- BITS Pilani CAD Course OverviewDokumen3 halamanBITS Pilani CAD Course OverviewHIMANSHU JAINBelum ada peringkat
- Vel Tech High Tech DR - Ranagarajan DR - Sakunthala Engineering College - Department of ECEDokumen27 halamanVel Tech High Tech DR - Ranagarajan DR - Sakunthala Engineering College - Department of ECEkarthikapecBelum ada peringkat
- Department Dept. Code Course Title Course Code Pre-Requisite(s) Credit HoursDokumen2 halamanDepartment Dept. Code Course Title Course Code Pre-Requisite(s) Credit HoursShahzad AsifBelum ada peringkat
- Math F214Dokumen3 halamanMath F214Pratham JainBelum ada peringkat
- Course Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilDokumen2 halamanCourse Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilSUNOBHAIBelum ada peringkat
- Bits PilaniDokumen3 halamanBits PilaniasdmddamcBelum ada peringkat
- CN4227R - Course Outline - 2017Dokumen11 halamanCN4227R - Course Outline - 2017Ming XiangBelum ada peringkat
- Gujarat Technological University: W.E.F. AY 2018-19Dokumen3 halamanGujarat Technological University: W.E.F. AY 2018-19Alok MauryaBelum ada peringkat
- BITS Pilani Goa Campus Course on VLSI DesignDokumen3 halamanBITS Pilani Goa Campus Course on VLSI DesignNitu SharmaBelum ada peringkat
- IC301 Control Engineering-IDokumen3 halamanIC301 Control Engineering-IAKSHAY KRISHNA K RBelum ada peringkat
- Introduction To Control System Course OutlineDokumen5 halamanIntroduction To Control System Course OutlineGemechisBelum ada peringkat
- ECE SS Course DiscriptionDokumen12 halamanECE SS Course DiscriptionMr V. Phaninder ReddyBelum ada peringkat
- BITS Course Handout: Introduction to MEMSDokumen5 halamanBITS Course Handout: Introduction to MEMSParth SoodanBelum ada peringkat
- ELE532 Course OutlineDokumen5 halamanELE532 Course OutlinesabitavabiBelum ada peringkat
- Cs f342 Computer Architecture1Dokumen2 halamanCs f342 Computer Architecture1Tony RossBelum ada peringkat
- Birla Institute of Technology & Science, Pilani Instruction Division FIRST SEMESTER 2017 - 2018 Course Handout (Part Ii)Dokumen2 halamanBirla Institute of Technology & Science, Pilani Instruction Division FIRST SEMESTER 2017 - 2018 Course Handout (Part Ii)prabhatBelum ada peringkat
- Seminar Report Name of The Seminar Topic: Rajasthan Technical University, KotaDokumen8 halamanSeminar Report Name of The Seminar Topic: Rajasthan Technical University, KotaSaransh SharmaBelum ada peringkat
- DDDokumen3 halamanDDJAY JANAK MANEKBelum ada peringkat
- Control Lab ManualDokumen46 halamanControl Lab ManualSrinivasan PurushothamanBelum ada peringkat
- Analysis of Three-Dimensional Heat Transfer in Micro-Channel Heat SinksDokumen13 halamanAnalysis of Three-Dimensional Heat Transfer in Micro-Channel Heat SinksNihal GuptaBelum ada peringkat
- Techniques of Capital BudgetingDokumen21 halamanTechniques of Capital BudgetingShilpa RajuBelum ada peringkat
- Heat Transfer Analysis of Micro Channel Heat SinkDokumen5 halamanHeat Transfer Analysis of Micro Channel Heat SinkNihal GuptaBelum ada peringkat
- Integrated Microchannel Cooling in A Three Dimensional Integrated Circuit A Ther Mal Man Age MentDokumen4 halamanIntegrated Microchannel Cooling in A Three Dimensional Integrated Circuit A Ther Mal Man Age MentNihal GuptaBelum ada peringkat
- L2, 3,4 - PneDokumen37 halamanL2, 3,4 - PneNihal GuptaBelum ada peringkat
- Mock 1 QDokumen50 halamanMock 1 QNihal GuptaBelum ada peringkat
- CFD PDFDokumen94 halamanCFD PDFShaheen S. RatnaniBelum ada peringkat
- Handout Eeef473 Instrf473 Wes Sem-I 2015 2016Dokumen3 halamanHandout Eeef473 Instrf473 Wes Sem-I 2015 2016AkshayJhaBelum ada peringkat
- Bulletin 2017 18Dokumen626 halamanBulletin 2017 18Simanchal KarBelum ada peringkat
- 2015 CFA Level 3 Study NoteBook3 PDFDokumen176 halaman2015 CFA Level 3 Study NoteBook3 PDFNihal GuptaBelum ada peringkat
- Handout Eeef473 Instrf473 Wes Sem-I 2015 2016Dokumen3 halamanHandout Eeef473 Instrf473 Wes Sem-I 2015 2016AkshayJhaBelum ada peringkat
- 09 Chapter 2Dokumen40 halaman09 Chapter 2Nihal GuptaBelum ada peringkat
- 1750 1383 2 PB PDFDokumen7 halaman1750 1383 2 PB PDFpriyaBelum ada peringkat
- What Is SOPDokumen5 halamanWhat Is SOPNihal GuptaBelum ada peringkat
- 1 Solution HMTDokumen18 halaman1 Solution HMTNihal GuptaBelum ada peringkat
- Additional Numerical Problems CH 7Dokumen3 halamanAdditional Numerical Problems CH 7Nihal GuptaBelum ada peringkat
- Anti Ragging UndertakingDokumen1 halamanAnti Ragging UndertakingNihal GuptaBelum ada peringkat
- Mohr's Circle Stress TransformationDokumen56 halamanMohr's Circle Stress TransformationNihal GuptaBelum ada peringkat
- PID Controller - DC MotorDokumen6 halamanPID Controller - DC MotorKrutika GiteBelum ada peringkat
- State Council For Technical Education and Vocational Training, OdishaDokumen28 halamanState Council For Technical Education and Vocational Training, OdishaSUDHIR KUMAR DASBelum ada peringkat
- C and I Lab Manual - 1Dokumen95 halamanC and I Lab Manual - 1iniyavan3119Belum ada peringkat
- Control System Analysis & Design by Frequency ResponseDokumen38 halamanControl System Analysis & Design by Frequency ResponseDozdiBelum ada peringkat
- Control System Design by Using Frequency Response ApproachDokumen73 halamanControl System Design by Using Frequency Response ApproachDipti GuptaBelum ada peringkat
- Bode Plot RulesDokumen5 halamanBode Plot RulesreporterrajiniBelum ada peringkat
- 01372a PDFDokumen48 halaman01372a PDFjoao121289Belum ada peringkat
- System Analysis in Control System1Dokumen5 halamanSystem Analysis in Control System1PhanindraBelum ada peringkat
- Ahs 2014 Mclaws PDFDokumen13 halamanAhs 2014 Mclaws PDFJohn AlvarezBelum ada peringkat
- Study Lead-Lag CompensatorsDokumen9 halamanStudy Lead-Lag CompensatorsVats AlokBelum ada peringkat
- Analog & Digital Control SystemsDokumen3 halamanAnalog & Digital Control SystemsAyush PurohitBelum ada peringkat
- Oma 1Dokumen223 halamanOma 1Aman PalBelum ada peringkat
- Tidu 413Dokumen25 halamanTidu 413suganthsuthaBelum ada peringkat
- Right Half Plane Limitations on Sensitivity FunctionsDokumen11 halamanRight Half Plane Limitations on Sensitivity Functionsharis13haris100% (1)
- Bode Polar Nyquist Plots of 1/s^3 + 5s^2 + 2s + 1 SystemDokumen1 halamanBode Polar Nyquist Plots of 1/s^3 + 5s^2 + 2s + 1 SystemcdasBelum ada peringkat
- 10132Dokumen10 halaman10132dramsree1Belum ada peringkat
- Mechatronics 2: Vehicle Physical Model: Small-Signal LinearizationDokumen35 halamanMechatronics 2: Vehicle Physical Model: Small-Signal LinearizationFady MichealBelum ada peringkat
- 781 ProjectDokumen9 halaman781 ProjectAayush ShrivastavaBelum ada peringkat
- Current Mode Buck ConverterDokumen37 halamanCurrent Mode Buck ConverterGenetic JohnBelum ada peringkat
- LQG/LQR Controller Design: Undergraduate Lecture Notes OnDokumen37 halamanLQG/LQR Controller Design: Undergraduate Lecture Notes OnJován MéridaBelum ada peringkat
- Frequency Response Analysis: Karl D. Hammond January 2008Dokumen14 halamanFrequency Response Analysis: Karl D. Hammond January 2008Trixie NuylesBelum ada peringkat
- Virtual reference feedback tuning method designs controllers from input-output dataDokumen10 halamanVirtual reference feedback tuning method designs controllers from input-output dataWilliam GuarientiBelum ada peringkat
- Impedance Adaptive Dual-Mode Control of Grid-Connected Inverters With Large Fluctuation of SCR and Its Stability Analysis Based On D-Partition MethodDokumen16 halamanImpedance Adaptive Dual-Mode Control of Grid-Connected Inverters With Large Fluctuation of SCR and Its Stability Analysis Based On D-Partition Method张明Belum ada peringkat
- EC6405 Syllabus Control Systems Engineering Class III EEEDokumen16 halamanEC6405 Syllabus Control Systems Engineering Class III EEEAruna ChandranBelum ada peringkat