Anda mungkin juga menyukai
- Free Vibration Analysis of Beams by Using A Third-Order Shear Deformation TheoryDokumen13 halamanFree Vibration Analysis of Beams by Using A Third-Order Shear Deformation TheoryalokjietBelum ada peringkat
- Nonlinear Inelastic Analysis of Steel-Concrete Composite Beam-Columns Using The Stability FunctionsDokumen23 halamanNonlinear Inelastic Analysis of Steel-Concrete Composite Beam-Columns Using The Stability FunctionsIgnacio TabuadaBelum ada peringkat
- Large Deflection Static Analysis of Rectangular Plates On Two Parameter Elastic FoundationsDokumen9 halamanLarge Deflection Static Analysis of Rectangular Plates On Two Parameter Elastic FoundationsAnonymous wWOWz9UnWBelum ada peringkat
- Effect of Winkler Foundation On Frequencies and Mode Shapes of Rectangular Plates Under Varying In-Plane Stresses by DQMDokumen17 halamanEffect of Winkler Foundation On Frequencies and Mode Shapes of Rectangular Plates Under Varying In-Plane Stresses by DQMSalam FaithBelum ada peringkat
- Spiral Singularities of A SemiflowDokumen14 halamanSpiral Singularities of A SemiflowKamil DunstBelum ada peringkat
- Transverse Vibrations of BeamsDokumen18 halamanTransverse Vibrations of BeamsopnbkBelum ada peringkat
- Icsv 28 (2022) 178 - DSS KKVDokumen8 halamanIcsv 28 (2022) 178 - DSS KKVKarthik SankarBelum ada peringkat
- Dynamical Systems Introduction to Jacobi Elliptic FunctionsDokumen10 halamanDynamical Systems Introduction to Jacobi Elliptic FunctionsJhon Edison Bravo BuitragoBelum ada peringkat
- Calculation of The Changes in The Absorption and Refractive Index For Intersubband Optical Transitions in A Quantum BoxDokumen8 halamanCalculation of The Changes in The Absorption and Refractive Index For Intersubband Optical Transitions in A Quantum BoxWilliam RodriguezBelum ada peringkat
- HDQ-FD Integrated Methodology For Nonlinear Static and Dynamic Response of Doubly Curved Shallow ShellsDokumen16 halamanHDQ-FD Integrated Methodology For Nonlinear Static and Dynamic Response of Doubly Curved Shallow ShellsmahbubeBelum ada peringkat
- From Particles To FieldsDokumen13 halamanFrom Particles To Fieldsaravindanm24Belum ada peringkat
- Vibration of A Free Free Beam Under TensDokumen10 halamanVibration of A Free Free Beam Under Tensjean.vasco94Belum ada peringkat
- Vibration Analysis of Plates With Cutouts by The Modified Rayleigh-Ritz MethodDokumen12 halamanVibration Analysis of Plates With Cutouts by The Modified Rayleigh-Ritz Methodkrisbhaskar22-1Belum ada peringkat
- Vibrations of Bonded Beams With A Single Lap Adhesive JointDokumen11 halamanVibrations of Bonded Beams With A Single Lap Adhesive JointBobby Yusuf HakaBelum ada peringkat
- On The Deformation of Layered Composite Arches Using Exponential Shear and Normal Deformation Theory (13.09.2023)Dokumen11 halamanOn The Deformation of Layered Composite Arches Using Exponential Shear and Normal Deformation Theory (13.09.2023)Velchuri SairamBelum ada peringkat
- Probabilistic Structural Dynamics Methods ComparedDokumen39 halamanProbabilistic Structural Dynamics Methods Comparedejzuppelli8036Belum ada peringkat
- On Certain Schlomilch-Type SeriesDokumen13 halamanOn Certain Schlomilch-Type Seriesdavid_bhattBelum ada peringkat
- TSP Cmes 1Dokumen26 halamanTSP Cmes 1lepetitkrahBelum ada peringkat
- 3D Bright-Bright Peregrine Triple-One Structures in A Nonautonomous Partially Nonlocal Vector Nonlinear SCHR Odinger Model Under A Harmonic PotentialDokumen15 halaman3D Bright-Bright Peregrine Triple-One Structures in A Nonautonomous Partially Nonlocal Vector Nonlinear SCHR Odinger Model Under A Harmonic PotentialJustin MibaileBelum ada peringkat
- The FDTD Grid and The Yee Algorithm PDFDokumen41 halamanThe FDTD Grid and The Yee Algorithm PDFMatthew JenkinsBelum ada peringkat
- Existence Andglobal Stability of Traveling Curved Fronts in The Allen-Cahn EquationsDokumen30 halamanExistence Andglobal Stability of Traveling Curved Fronts in The Allen-Cahn EquationsLuis FuentesBelum ada peringkat
- Archive of SIDDokumen12 halamanArchive of SIDHalilKrizevacBelum ada peringkat
- 2 Aip 2019Dokumen6 halaman2 Aip 2019STAN MARIABelum ada peringkat
- 2005 Vcnls EPJBDokumen4 halaman2005 Vcnls EPJBhogakoxBelum ada peringkat
- FQT2023 2Dokumen5 halamanFQT2023 2muay88Belum ada peringkat
- Turgeman (Ub 1982)Dokumen20 halamanTurgeman (Ub 1982)Paramita BhattacharyaBelum ada peringkat
- J. N. Reddy - 1979 - Free Vibration of Antisymmetric, Angle-Ply Laminated Plates Including Transverse Shear Deformation by The Finite Element MethodDokumen12 halamanJ. N. Reddy - 1979 - Free Vibration of Antisymmetric, Angle-Ply Laminated Plates Including Transverse Shear Deformation by The Finite Element MethodSevim GüçlüBelum ada peringkat
- On Gauss Lemniscate Func-Tions and Lemniscatic Mean: NeumanDokumen18 halamanOn Gauss Lemniscate Func-Tions and Lemniscatic Mean: Neumanعقبة عقبةBelum ada peringkat
- International Journal of Pure and Applied Mathematics No. 1 2012, 17-27Dokumen12 halamanInternational Journal of Pure and Applied Mathematics No. 1 2012, 17-27boris laraBelum ada peringkat
- Analysis of Half Wave Length Dipole Antenna Radiation Characteristics Using FDTDDokumen8 halamanAnalysis of Half Wave Length Dipole Antenna Radiation Characteristics Using FDTDMARK LULEBelum ada peringkat
- Nonlinear Impact Response of Doubly Curved Composite ShellsDokumen6 halamanNonlinear Impact Response of Doubly Curved Composite ShellsVenkata Swamy Naidu NeigapulaBelum ada peringkat
- Murakami - Analysis of Stress Intensity Factors of Modes I, II and III For Inclined Surface Cracks of Arbitrary ShapeDokumen14 halamanMurakami - Analysis of Stress Intensity Factors of Modes I, II and III For Inclined Surface Cracks of Arbitrary ShapeDavid C HouserBelum ada peringkat
- Dynamic analysis of thick plates and beamsDokumen14 halamanDynamic analysis of thick plates and beamsAliouane MhamedBelum ada peringkat
- An - Article - To - Be - Published - in - The - Future - Optics of The Turbulent AtmosphereDokumen11 halamanAn - Article - To - Be - Published - in - The - Future - Optics of The Turbulent AtmosphereElad DakarBelum ada peringkat
- Transmission of One-Dimensional Images Through A Single Optical Fiber by Time-Integrated HolographyDokumen4 halamanTransmission of One-Dimensional Images Through A Single Optical Fiber by Time-Integrated Holographyz.umul9031Belum ada peringkat
- Denef H10AlgIntegerRingsII PDFDokumen11 halamanDenef H10AlgIntegerRingsII PDFJan DenefBelum ada peringkat
- Application of Reciprocal Theorem With Complete Functions in Static and Vibration Problems of Thin Elastic PlatesDokumen12 halamanApplication of Reciprocal Theorem With Complete Functions in Static and Vibration Problems of Thin Elastic PlatesSasikorn LeungvichcharoenBelum ada peringkat
- Pi Hua1991Dokumen5 halamanPi Hua1991madanifateh1984Belum ada peringkat
- Stresses in Hi-Metal Thermostats: E. SuhirDokumen4 halamanStresses in Hi-Metal Thermostats: E. SuhirTomislav SertićBelum ada peringkat
- 2016.proceedings Cmmse 2Dokumen4 halaman2016.proceedings Cmmse 2JE Macias-DiazBelum ada peringkat
- Relation Between Eulerbernoulli Equation and Contemporary Knowledge in RoboticsDokumen13 halamanRelation Between Eulerbernoulli Equation and Contemporary Knowledge in RoboticsDavid C HouserBelum ada peringkat
- Visco-Bresse 27 July 19Dokumen21 halamanVisco-Bresse 27 July 19Wael YoussefBelum ada peringkat
- Band Theory Explained by Kronig-Penny ModelDokumen16 halamanBand Theory Explained by Kronig-Penny ModelVasursharpBelum ada peringkat
- Dynamic Analysis of A Timoshenko Beam Subjected To Moving Concentrated Forces Using The Finite Element MethodDokumen11 halamanDynamic Analysis of A Timoshenko Beam Subjected To Moving Concentrated Forces Using The Finite Element MethodEdo Prasetya AdiBelum ada peringkat
- (B4 2sided) Dynamic Stiffness (H. Ma 2008) - Exact Solution of Vibration Problems of Frame StructuresDokumen12 halaman(B4 2sided) Dynamic Stiffness (H. Ma 2008) - Exact Solution of Vibration Problems of Frame Structuresali mortazaviBelum ada peringkat
- Analysis of Capacitively Coupled Microstrip-Ring Resonator Based On Spectral Domain Method R. Rezaiesarlak and F. HodjatkashaniDokumen9 halamanAnalysis of Capacitively Coupled Microstrip-Ring Resonator Based On Spectral Domain Method R. Rezaiesarlak and F. HodjatkashaniAhmed JavedBelum ada peringkat
- On The M-Projective Curvature Tensor of A Kenmotsu Manifold: S.K. Chaubey and R.H. OjhaDokumen9 halamanOn The M-Projective Curvature Tensor of A Kenmotsu Manifold: S.K. Chaubey and R.H. OjhaThanh Ha NguyenBelum ada peringkat
- C4 Kinematics of Point Mass 1Dokumen9 halamanC4 Kinematics of Point Mass 1Cheche TiberiusBelum ada peringkat
- Vibration Frequencies For A Non-Uniform Beam With End MassDokumen9 halamanVibration Frequencies For A Non-Uniform Beam With End MassThanyawut WansuwanBelum ada peringkat
- Article 3Dokumen10 halamanArticle 3sami Tub ftBelum ada peringkat
- 03 00080103 ClemensDokumen23 halaman03 00080103 ClemensAhmet TurgutBelum ada peringkat
- The Wiener filter for noise reductionDokumen4 halamanThe Wiener filter for noise reductionBOLTZ VECBelum ada peringkat
- Antenna Factorization of Gauge-Theory AmplitudesDokumen13 halamanAntenna Factorization of Gauge-Theory AmplitudesfarhadBelum ada peringkat
- Analytical Modeling of Quadruple Gate MOSFETDokumen16 halamanAnalytical Modeling of Quadruple Gate MOSFETVishu RaoBelum ada peringkat
- Wave-Vector Diagrams For Two-Dimensional Photonic CrystalsDokumen9 halamanWave-Vector Diagrams For Two-Dimensional Photonic CrystalsNguyen Sy Thanh SonBelum ada peringkat
- Aden - Kerker. Scattering Efficiency For A Layered Sphere. 1951Dokumen6 halamanAden - Kerker. Scattering Efficiency For A Layered Sphere. 1951İlke Ve Bekir Türedi100% (2)
- U U V V W: Extending Koiter's Simplified Equations To Cylindrical Shells of Arbitrary Closed Cross SectionDokumen7 halamanU U V V W: Extending Koiter's Simplified Equations To Cylindrical Shells of Arbitrary Closed Cross SectionRui CbBelum ada peringkat
- J F Barrett MICOM 2015 2018 RevisionDokumen13 halamanJ F Barrett MICOM 2015 2018 RevisionMohammad AbuyahyaBelum ada peringkat
- Generalized JacobsthalpolynomialsDokumen6 halamanGeneralized JacobsthalpolynomialsVAHID VAHIDBelum ada peringkat
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Dari EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Belum ada peringkat
- DrawingDokumen19 halamanDrawingjssrikantamurthyBelum ada peringkat
- Theory of Tool Wear and Surface RoughnessDokumen12 halamanTheory of Tool Wear and Surface RoughnessjssrikantamurthyBelum ada peringkat
- Machine Tools Course OverviewDokumen120 halamanMachine Tools Course OverviewAnonymous GEHeEQlajbBelum ada peringkat
- 18EME15 IA1 Scheme & Solution UpdatedDokumen6 halaman18EME15 IA1 Scheme & Solution UpdatedjssrikantamurthyBelum ada peringkat
- Static Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALDokumen8 halamanStatic Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALjssrikantamurthyBelum ada peringkat
- Economics of MachiningDokumen24 halamanEconomics of MachiningjssrikantamurthyBelum ada peringkat
- 3.2.1.2 According To The Position and Travel of Ram: Hydraulic ShaperDokumen14 halaman3.2.1.2 According To The Position and Travel of Ram: Hydraulic ShapersadadBelum ada peringkat
- Machine Tool-Economic of MTDokumen29 halamanMachine Tool-Economic of MTjssrikantamurthyBelum ada peringkat
- EME E-Note 02032016 091807AMDokumen207 halamanEME E-Note 02032016 091807AMDHAVAL PANCHALBelum ada peringkat
- CH 6 Machining ProcessesDokumen32 halamanCH 6 Machining ProcessesjssrikantamurthyBelum ada peringkat
- Eme Test 2 SchemeDokumen7 halamanEme Test 2 SchemejssrikantamurthyBelum ada peringkat
- Chip Formation: Four Basic Type of Chips in Machining AreDokumen14 halamanChip Formation: Four Basic Type of Chips in Machining ArejssrikantamurthyBelum ada peringkat
- Machining Operations and Machine ToolsDokumen18 halamanMachining Operations and Machine ToolsAnonymous mKdAfWifBelum ada peringkat
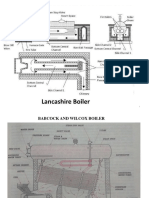
- Eme BoilerDokumen6 halamanEme BoilerjssrikantamurthyBelum ada peringkat
- Module 2Dokumen35 halamanModule 2jssrikantamurthyBelum ada peringkat
- 4.3 Hole Making Design Concept DrillingDokumen44 halaman4.3 Hole Making Design Concept DrillingjssrikantamurthyBelum ada peringkat
- 3.2.1.2 According To The Position and Travel of Ram: Hydraulic ShaperDokumen14 halaman3.2.1.2 According To The Position and Travel of Ram: Hydraulic ShapersadadBelum ada peringkat
- 5.3 Operating Conditions Drilling1Dokumen19 halaman5.3 Operating Conditions Drilling1jssrikantamurthyBelum ada peringkat
- ANSYS 14 Structural Mechanics UpdateDokumen103 halamanANSYS 14 Structural Mechanics UpdateRama KrishnaBelum ada peringkat
- Internal Marks EntryDokumen6 halamanInternal Marks EntryjssrikantamurthyBelum ada peringkat
- Drills GeometryDokumen64 halamanDrills GeometryEden AbdulaBelum ada peringkat
- 11-Finite Element Modeling and Solution TechniqueDokumen55 halaman11-Finite Element Modeling and Solution TechniquejssrikantamurthyBelum ada peringkat
- Lathe DrillingDokumen16 halamanLathe DrillingManjunatha EikilaBelum ada peringkat
- Model - I Turning Operations Performed On A Given Mild Steel Work PieceDokumen4 halamanModel - I Turning Operations Performed On A Given Mild Steel Work PiecejssrikantamurthyBelum ada peringkat
- Metal Casting and WeldingDokumen4 halamanMetal Casting and WeldingjssrikantamurthyBelum ada peringkat
- Metal Casting and WeldingDokumen4 halamanMetal Casting and WeldingjssrikantamurthyBelum ada peringkat
- Machining Operations and Machine ToolsDokumen18 halamanMachining Operations and Machine ToolsAnonymous mKdAfWifBelum ada peringkat
- Three DimensionalvibrationanalysisofisotropicandorthotropicDokumen16 halamanThree DimensionalvibrationanalysisofisotropicandorthotropicjssrikantamurthyBelum ada peringkat
- Boring Machines: Salunke M.DDokumen36 halamanBoring Machines: Salunke M.DjssrikantamurthyBelum ada peringkat
- NTPD Previous QPDokumen10 halamanNTPD Previous QP20H51A0540-NAKKA SREEKAR B.Tech CSE (2020-24)Belum ada peringkat
- Chapter 3Dokumen61 halamanChapter 3محمد فائزBelum ada peringkat
- Big O Notation: 1 Comparing AlgorithmsDokumen6 halamanBig O Notation: 1 Comparing Algorithmslekan4Belum ada peringkat
- Module 2-Lesson 1Dokumen11 halamanModule 2-Lesson 1Cindy BononoBelum ada peringkat
- Review of Vectors and Matrices: Appendix DDokumen16 halamanReview of Vectors and Matrices: Appendix DPedro SimõesBelum ada peringkat
- Textbook of Linear Algebra by Jim HefferonDokumen456 halamanTextbook of Linear Algebra by Jim HefferonCSF511112100% (1)
- Computer-Aided-Engineering-And-Fem-Exam PaperDokumen2 halamanComputer-Aided-Engineering-And-Fem-Exam Papersuneel kumar rathoreBelum ada peringkat
- A Workbook On Implementing L-System Fractals Using PythonDokumen9 halamanA Workbook On Implementing L-System Fractals Using PythonShibaji BanerjeeBelum ada peringkat
- W. F. Chen, Plasticity For Structural Engineers, 1988-70Dokumen1 halamanW. F. Chen, Plasticity For Structural Engineers, 1988-70ahmed shakerBelum ada peringkat
- Auto CutsDokumen11 halamanAuto CutsRoi PoranneBelum ada peringkat
- 6-Principles and Techniques of Vibrations (Mirovich)Dokumen704 halaman6-Principles and Techniques of Vibrations (Mirovich)deepak_gupta_priti100% (2)
- Chapter 4 - Jacobain - From Khatib - Introduction To RoboticsDokumen44 halamanChapter 4 - Jacobain - From Khatib - Introduction To RoboticskpnskBelum ada peringkat
- EEEN60114 Exam PaperDokumen5 halamanEEEN60114 Exam PaperDaniel AbaraBelum ada peringkat
- Descartes' Rule of Signs - WikipediaDokumen5 halamanDescartes' Rule of Signs - WikipediaPranavi AnchaBelum ada peringkat
- Wavelet TransformDokumen28 halamanWavelet TransformShimaa Barakat100% (1)
- 10.4 Day 1 Study Guide and Intervention: Natural LogarithmsDokumen2 halaman10.4 Day 1 Study Guide and Intervention: Natural LogarithmsMing HouBelum ada peringkat
- Note6 IntegerprogrammingDokumen27 halamanNote6 Integerprogrammingアユ ギタBelum ada peringkat
- Integration! Odd Functions! Even Functions! Calculus Thinking! A Weird Problem!Dokumen7 halamanIntegration! Odd Functions! Even Functions! Calculus Thinking! A Weird Problem!abdul sabourBelum ada peringkat
- Lesson 2 - Linear ProgrammingDokumen32 halamanLesson 2 - Linear ProgrammingTyrsonBelum ada peringkat
- MTH 101 Midterm Solved Paper 5Dokumen6 halamanMTH 101 Midterm Solved Paper 5Muhammad Zeeshan100% (1)
- 9709 m19 32Dokumen20 halaman9709 m19 32Izhar RahmanBelum ada peringkat
- Write The Generating Function For The Sequence 2. 3. 4. 5. 6Dokumen2 halamanWrite The Generating Function For The Sequence 2. 3. 4. 5. 6Sachin SvsBelum ada peringkat
- Derivatives and Rates of Change ExplainedDokumen46 halamanDerivatives and Rates of Change Explainedbabar ahmadBelum ada peringkat
- Fast and Accurate Bessel Function Computation: John Harrison, Intel CorporationDokumen22 halamanFast and Accurate Bessel Function Computation: John Harrison, Intel Corporationfeprinciples1607Belum ada peringkat
- Course Details: Scheme of Teaching & MarksDokumen32 halamanCourse Details: Scheme of Teaching & Markssridhar GowdaBelum ada peringkat
- Introduction to Mathematical Programming Lecture 2: Geometry of Linear Optimization IDokumen10 halamanIntroduction to Mathematical Programming Lecture 2: Geometry of Linear Optimization IDavid Esteban Meneses RendicBelum ada peringkat
- 3.0 Mohr - S Circle (Plane Stress)Dokumen10 halaman3.0 Mohr - S Circle (Plane Stress)Muhammad AdilBelum ada peringkat
- Untitled NotebookDokumen106 halamanUntitled NotebookdarshBelum ada peringkat
- Kaddour Najim Control of Continuous Linear SystemsDokumen11 halamanKaddour Najim Control of Continuous Linear SystemsChrislei RizzattiBelum ada peringkat