Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Mysql Commands NotesDokumen23 halamanMysql Commands NotesShashwat & ShanayaBelum ada peringkat
- Zoho Creator Beginners Handbook PDFDokumen22 halamanZoho Creator Beginners Handbook PDFBysani Vinod KumarBelum ada peringkat
- Fingerprint Recognition Using MATLAB PDFDokumen74 halamanFingerprint Recognition Using MATLAB PDFshakil0% (1)
- Connectivity CPI C4CDokumen8 halamanConnectivity CPI C4Cfozia_shanu100% (1)
- Using Pony in FlaskDokumen90 halamanUsing Pony in FlaskPrivilege MudzingeBelum ada peringkat
- Microprocessors and MicrocomputersDokumen573 halamanMicroprocessors and MicrocomputersMehmet Kırgözoğlu90% (10)
- Visualcam ManualDokumen266 halamanVisualcam ManualSebastian MedinaBelum ada peringkat
- Print Basic Text in PythonDokumen113 halamanPrint Basic Text in PythonAnkur SinghBelum ada peringkat
- Active, Proactive or Reactive?: Assessing Your Cyber Security PostureDokumen6 halamanActive, Proactive or Reactive?: Assessing Your Cyber Security PostureSyahid FarhanBelum ada peringkat
- Arm Vehicular TrackkingDokumen5 halamanArm Vehicular TrackkingShruti BoraBelum ada peringkat
- Networking 1 TutorialDokumen12 halamanNetworking 1 TutorialSocaciu VioricaBelum ada peringkat
- Sasken Placement Paper Details 2011Dokumen9 halamanSasken Placement Paper Details 2011venniiiiBelum ada peringkat
- A Unified Approach To Parallel Depth-First Traversals of General TreeDokumen11 halamanA Unified Approach To Parallel Depth-First Traversals of General Treeapi-168623254Belum ada peringkat
- Lecture CH 2 Sec 110Dokumen46 halamanLecture CH 2 Sec 110Gary BaxleyBelum ada peringkat
- Kernel Nearest-Neighbor AlgorithmDokumen10 halamanKernel Nearest-Neighbor AlgorithmDebora OlivaresBelum ada peringkat
- ADP Updating Methods (Text Only)Dokumen2 halamanADP Updating Methods (Text Only)Keittikun PhairinBelum ada peringkat
- SC2012 VMM DocumentationDokumen614 halamanSC2012 VMM DocumentationtithleangBelum ada peringkat
- LTE Network Architecture - BasicDokumen9 halamanLTE Network Architecture - BasicTELECOM INJINIYABelum ada peringkat
- Slant Range To Ground RangeDokumen5 halamanSlant Range To Ground RangeSuresh DevarajBelum ada peringkat
- Auditing Ina Computerized EnvironmentDokumen24 halamanAuditing Ina Computerized EnvironmentPrincessa LeeBelum ada peringkat
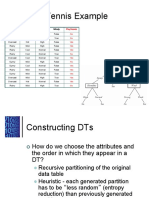
- Play Tennis Example: Outlook Temperature Humidity WindyDokumen29 halamanPlay Tennis Example: Outlook Temperature Humidity Windyioi123Belum ada peringkat
- Data analysis for car crash simulation optimizationDokumen22 halamanData analysis for car crash simulation optimizationGoutham Mareeswaran BBelum ada peringkat
- Excel Vba Print Range To PDFDokumen2 halamanExcel Vba Print Range To PDFJimmyBelum ada peringkat
- PCP Users and Administrators GuideDokumen123 halamanPCP Users and Administrators GuideClaudiaBelum ada peringkat
- (WWW - Entrance-Exam - Net) - DOEACC B Level-Network Management & Information Security Sample Paper 1Dokumen2 halaman(WWW - Entrance-Exam - Net) - DOEACC B Level-Network Management & Information Security Sample Paper 1DEBLEENA VIJAYBelum ada peringkat
- Karatsuba Algorithm and Urdhva-Tiryagbhyam AlgorithmDokumen6 halamanKaratsuba Algorithm and Urdhva-Tiryagbhyam AlgorithmAMIT KUMAR PANDABelum ada peringkat
- Pthreads - MutexesDokumen13 halamanPthreads - MutexesRanjith M KumarBelum ada peringkat
- CMPE 102 - Computer Programming 2017-2018, Fall Midterm Exam-1Dokumen5 halamanCMPE 102 - Computer Programming 2017-2018, Fall Midterm Exam-1Burak BagginsBelum ada peringkat
- Tugasan MTS3013 Pengaturcaraan BerstrukturDokumen19 halamanTugasan MTS3013 Pengaturcaraan BerstrukturMuhamad Basyir Mat NawiBelum ada peringkat
- SNORT ToolDokumen11 halamanSNORT ToolVinayak WadhwaBelum ada peringkat