Anda mungkin juga menyukai
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDari EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBelum ada peringkat
- A Linear Quadratic Tracking Based Voltage Controller For VSI MVDC Shipboard Power System ApplicationDokumen5 halamanA Linear Quadratic Tracking Based Voltage Controller For VSI MVDC Shipboard Power System ApplicationJose Luis SarmientoBelum ada peringkat
- Reduced Switching-Frequency Modulation and Circulating Current Suppression For Modular Multilevel ConvertersDokumen9 halamanReduced Switching-Frequency Modulation and Circulating Current Suppression For Modular Multilevel ConvertersDebdeep SamajdarBelum ada peringkat
- (22559159 - Electrical, Control and Communication Engineering) Current Sensorless Control Algorithm For Single-Phase Three-Level NPC InverterDokumen6 halaman(22559159 - Electrical, Control and Communication Engineering) Current Sensorless Control Algorithm For Single-Phase Three-Level NPC InverterRaghunandan SubramanianBelum ada peringkat
- Electric Power Systems Research: SciencedirectDokumen15 halamanElectric Power Systems Research: SciencedirectBHARADWAJ CHIVUKULABelum ada peringkat
- An Improved SVM Strategy To Reduce DC Current Ripple For AC-DC Matrix ConverterDokumen7 halamanAn Improved SVM Strategy To Reduce DC Current Ripple For AC-DC Matrix ConverterariphineBelum ada peringkat
- 152 155, Tesma203, IJEASTDokumen4 halaman152 155, Tesma203, IJEASTAdetunji Babatunde TaiwoBelum ada peringkat
- Control of Transformerless MMC-HVDC During Asymmetric Grid FaultsDokumen6 halamanControl of Transformerless MMC-HVDC During Asymmetric Grid FaultsXiaoxiao LiuBelum ada peringkat
- A Method To Reduce DC-link Overvoltage of PMSG Based WECS During LVRTDokumen6 halamanA Method To Reduce DC-link Overvoltage of PMSG Based WECS During LVRTSagiraju DileepBelum ada peringkat
- Energies 12 00157 PDFDokumen17 halamanEnergies 12 00157 PDFsunilkumareceBelum ada peringkat
- SPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDFDokumen7 halamanSPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDF张明Belum ada peringkat
- IJETR022506Dokumen5 halamanIJETR022506erpublicationBelum ada peringkat
- A Fast and Generalized Space Vector Modulation Scheme For Multilevel Inverters 2Dokumen6 halamanA Fast and Generalized Space Vector Modulation Scheme For Multilevel Inverters 2RodovarBelum ada peringkat
- Chen 2000Dokumen10 halamanChen 2000Venkat PrakashBelum ada peringkat
- 1 s2.0 S0360544222033485 MainDokumen21 halaman1 s2.0 S0360544222033485 MainKostas GekasBelum ada peringkat
- Comparison of Direct Current Control and Direct Power Control Using SVPMW ModulationDokumen5 halamanComparison of Direct Current Control and Direct Power Control Using SVPMW ModulationSreekanth IyerBelum ada peringkat
- HVDC Control Multitask PDFDokumen7 halamanHVDC Control Multitask PDFBHARADWAJ CHIVUKULABelum ada peringkat
- Energies 12 04093 v2 PDFDokumen17 halamanEnergies 12 04093 v2 PDFMohammedAzharuddinSBelum ada peringkat
- 05984362Dokumen6 halaman05984362muralimallikaBelum ada peringkat
- Control VectorialDokumen6 halamanControl VectorialdanipedoBelum ada peringkat
- Energy Balancing Improvement of Modular Multilevel Converters Under Unbalanced Grid ConditionsDokumen10 halamanEnergy Balancing Improvement of Modular Multilevel Converters Under Unbalanced Grid ConditionsXiaoxiao LiuBelum ada peringkat
- Ijert Ijert: Immunity of AC-DC Harmonics in VSC HVDC Transmission For Multi-Level ConvertersDokumen6 halamanIjert Ijert: Immunity of AC-DC Harmonics in VSC HVDC Transmission For Multi-Level ConvertersR.SRIKANTHBelum ada peringkat
- Overview On Submodule Topologies Modeling Modulation Control Schemes Fault Diagnosis and Tolerant ContDokumen21 halamanOverview On Submodule Topologies Modeling Modulation Control Schemes Fault Diagnosis and Tolerant ContRodovarBelum ada peringkat
- An Electromagnetic Transient Simulation Model ForDokumen4 halamanAn Electromagnetic Transient Simulation Model ForMohit Kumar ChowdaryBelum ada peringkat
- A Novel Control Strategy of Indirect Matrix ConverDokumen10 halamanA Novel Control Strategy of Indirect Matrix Convermạnh phanBelum ada peringkat
- Circulating Currents Control For Parallel Grid-Connected Three-Phase InvertersDokumen5 halamanCirculating Currents Control For Parallel Grid-Connected Three-Phase Inverterspibasiy912Belum ada peringkat
- SSR HVDCDokumen8 halamanSSR HVDCsajedarefinBelum ada peringkat
- Performance of A DC/AC/DC VSC System To Interconnect HVDC SystemsDokumen6 halamanPerformance of A DC/AC/DC VSC System To Interconnect HVDC SystemsM. K. RashedinBelum ada peringkat
- Control of HVDC Transmission System Based On MMC With Three-Level Flying Capacitor SubmoduleDokumen22 halamanControl of HVDC Transmission System Based On MMC With Three-Level Flying Capacitor SubmoduleAnand Parakkat Parambil100% (1)
- Generalized Discontinuous DC-link Balancing Modulation Strategy For Three-Level InvertersDokumen8 halamanGeneralized Discontinuous DC-link Balancing Modulation Strategy For Three-Level Invertersmeistehaft270Belum ada peringkat
- Modeling of VSC-HVDCDokumen5 halamanModeling of VSC-HVDCFelix GamarraBelum ada peringkat
- Harmonic Elimination in VSC HVDC System Using SHE-PWM: B. R K, K. M R, G. V S BDokumen5 halamanHarmonic Elimination in VSC HVDC System Using SHE-PWM: B. R K, K. M R, G. V S BMYNAMEBelum ada peringkat
- 1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsDokumen9 halaman1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsSivareddy MudiyalaBelum ada peringkat
- Simulation and Controller Design of An Interline Power Flow Controller in EMTP RVDokumen8 halamanSimulation and Controller Design of An Interline Power Flow Controller in EMTP RVSuresh Sampath SBelum ada peringkat
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDokumen13 halamanLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarBelum ada peringkat
- Power Synchronization Control of VSC-HVDC Transmission For Weak Ac SystemDokumen5 halamanPower Synchronization Control of VSC-HVDC Transmission For Weak Ac SystemGuru MishraBelum ada peringkat
- Improvement of Power Quality in Distribution System Using D-STATCOM With PI and PID ControllerDokumen7 halamanImprovement of Power Quality in Distribution System Using D-STATCOM With PI and PID ControllerPhani Kumar ChittalaBelum ada peringkat
- IEEE Recent DevelopmentDokumen12 halamanIEEE Recent Developmentتبارك النوريBelum ada peringkat
- DC Voltage Droop Control Implementation in The AC/DC Power Flow Algorithm: Combinational ApproachDokumen6 halamanDC Voltage Droop Control Implementation in The AC/DC Power Flow Algorithm: Combinational ApproachM. K. RashedinBelum ada peringkat
- Energies: AC Transmission Emulation Control Strategies For The BTB VSC HVDC System in The Metropolitan Area of SeoulDokumen15 halamanEnergies: AC Transmission Emulation Control Strategies For The BTB VSC HVDC System in The Metropolitan Area of Seoulnikon reddyBelum ada peringkat
- Control and Experiment of ACACDokumen8 halamanControl and Experiment of ACACVamsi GaneshBelum ada peringkat
- WP AdaptiveCellTopologyDokumen6 halamanWP AdaptiveCellTopologyManu MathewBelum ada peringkat
- A Unity Power Factor Converter Using The Synchronous Reference Frame Based Hysteresis Current ControlDokumen7 halamanA Unity Power Factor Converter Using The Synchronous Reference Frame Based Hysteresis Current ControlGabriel VilknBelum ada peringkat
- Aredes2001 Article MultipulseConvertersAndControlDokumen9 halamanAredes2001 Article MultipulseConvertersAndControlAbhay KotnalaBelum ada peringkat
- Current Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmDokumen7 halamanCurrent Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmAnonymous afzpkOo3Belum ada peringkat
- Applying To Control Overcurrents at Unbalanced Faults of Forced-Commutated Vscs Used As Static Var CompensatorsDokumen6 halamanApplying To Control Overcurrents at Unbalanced Faults of Forced-Commutated Vscs Used As Static Var CompensatorsJULFANRI SIRAITBelum ada peringkat
- Ashabani 3Dokumen15 halamanAshabani 3happyworryBelum ada peringkat
- Modeling of CHB Multilevel Inverter BasedDokumen5 halamanModeling of CHB Multilevel Inverter BasedOumaima JORAICHEBelum ada peringkat
- Control of A Modular Multi-Level Converter STATCOM For Low Voltage Ride-Through ConditionDokumen6 halamanControl of A Modular Multi-Level Converter STATCOM For Low Voltage Ride-Through ConditionBHARADWAJ CHIVUKULABelum ada peringkat
- Interpreting The Individual Capacitor Voltage Regulation Control of PSC-PWM MMC Via Consensus TheoryDokumen14 halamanInterpreting The Individual Capacitor Voltage Regulation Control of PSC-PWM MMC Via Consensus TheoryJahangir AlamBelum ada peringkat
- DC Microgrid and Control System Control of DC Microgrid SystemDokumen17 halamanDC Microgrid and Control System Control of DC Microgrid Systemsyed hasan 19210064Belum ada peringkat
- Mohan 2013Dokumen16 halamanMohan 2013Clotilde RodinoBelum ada peringkat
- Feedforward Accurate Power Sharing and Voltage Control For Multi-Terminal HVDC GridsDokumen6 halamanFeedforward Accurate Power Sharing and Voltage Control For Multi-Terminal HVDC Gridsmana danaBelum ada peringkat
- HVDC LCC Modelling: Digsilent PowerfactoryDokumen3 halamanHVDC LCC Modelling: Digsilent Powerfactorybeimar heredia saiguaBelum ada peringkat
- One-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorDokumen12 halamanOne-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorKrishna ReddyBelum ada peringkat
- Engineering Journal Modeling, Control and Steady State Analysis of Back To Back VSC HVDC SystemDokumen6 halamanEngineering Journal Modeling, Control and Steady State Analysis of Back To Back VSC HVDC SystemEngineering JournalBelum ada peringkat
- Control of PWM Rectifier Under Grid Voltage Dips: M. Bobrowska-Rafał, K. Rafał, G. Abad, and M. JasińskiDokumen7 halamanControl of PWM Rectifier Under Grid Voltage Dips: M. Bobrowska-Rafał, K. Rafał, G. Abad, and M. JasińskiKusolManyuenBelum ada peringkat
- Control of HVDC Transmission System Based On MMCDokumen22 halamanControl of HVDC Transmission System Based On MMCAnand Parakkat ParambilBelum ada peringkat
- HVDC and FACTS - PPT PDFDokumen19 halamanHVDC and FACTS - PPT PDFManu KasturiBelum ada peringkat
- Trends in Active Power Line Conditioners: Electrical Engineering FieldsDokumen7 halamanTrends in Active Power Line Conditioners: Electrical Engineering FieldsIrfan AliBelum ada peringkat
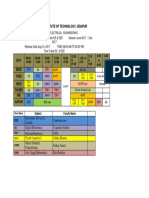
- III Sem EE & EEEDokumen1 halamanIII Sem EE & EEEIrfan AliBelum ada peringkat
- Certificate in Recitation of Quran - QiratDokumen2 halamanCertificate in Recitation of Quran - QiratIrfan AliBelum ada peringkat
- Faculty of Theology: B. A. (Hons.)Dokumen3 halamanFaculty of Theology: B. A. (Hons.)Irfan AliBelum ada peringkat
- Faculty of Theology B.A. (Hons.) Theology: 1. English LanguageDokumen1 halamanFaculty of Theology B.A. (Hons.) Theology: 1. English LanguageIrfan AliBelum ada peringkat
- Techno India NJR Institute of Technology, Udaipur: DAY MON Tues WED Thurs FRI SaturDokumen1 halamanTechno India NJR Institute of Technology, Udaipur: DAY MON Tues WED Thurs FRI SaturIrfan AliBelum ada peringkat
- Time-Table: B. Tech. - I SEM Section-A (CE + ME)Dokumen3 halamanTime-Table: B. Tech. - I SEM Section-A (CE + ME)Irfan AliBelum ada peringkat
- 6ec1 6ec2 6ec3 6ec4 6ec5 6ec6.2Dokumen1 halaman6ec1 6ec2 6ec3 6ec4 6ec5 6ec6.2Irfan AliBelum ada peringkat
- I Sem Faculty Time Table 2017-18Dokumen6 halamanI Sem Faculty Time Table 2017-18Irfan AliBelum ada peringkat
- List of Students (Ee/Eee) Who Were Absent Today in Matlab TrainingDokumen1 halamanList of Students (Ee/Eee) Who Were Absent Today in Matlab TrainingIrfan AliBelum ada peringkat
- List of Students (Ee/Eee) Who Were Absent Today in Matlab TrainingDokumen1 halamanList of Students (Ee/Eee) Who Were Absent Today in Matlab TrainingIrfan AliBelum ada peringkat
- PSMS Lab ManualDokumen42 halamanPSMS Lab ManualIrfan Ali100% (1)
- Techno India NJR Institute of Technology, UdaipurDokumen1 halamanTechno India NJR Institute of Technology, UdaipurIrfan AliBelum ada peringkat
- Midterm Exam Schedule For 2nd Year & 3rd Year ECEDokumen1 halamanMidterm Exam Schedule For 2nd Year & 3rd Year ECEIrfan AliBelum ada peringkat
- Time-Table: B. Tech. - I SEM Section-A (CE + ME)Dokumen3 halamanTime-Table: B. Tech. - I SEM Section-A (CE + ME)Irfan AliBelum ada peringkat
- Vi Sem Result 2014-2017Dokumen2 halamanVi Sem Result 2014-2017Irfan AliBelum ada peringkat
- Ac DC PWMDokumen6 halamanAc DC PWMIrfan AliBelum ada peringkat
- ABPM05 User ManualDokumen17 halamanABPM05 User ManualIrfan AliBelum ada peringkat
- Cascode AmplifierDokumen4 halamanCascode AmplifierJoshua LandoyBelum ada peringkat
- IcasesyDokumen40 halamanIcasesyPrem SagarBelum ada peringkat
- Digital Electronics Course MaterialDokumen54 halamanDigital Electronics Course MaterialMuhammad SalisBelum ada peringkat
- Fairchild Power Switch (FPS) : Features DescriptionDokumen12 halamanFairchild Power Switch (FPS) : Features DescriptioncomphomeBelum ada peringkat
- Smoke ScreensDokumen3 halamanSmoke ScreensGaryoBelum ada peringkat
- Project ReportDokumen54 halamanProject ReportHarendra Kumar67% (3)
- DT Fi D..peitd (O Di - Lo! T.: (B) @) Hin - LM.RDokumen12 halamanDT Fi D..peitd (O Di - Lo! T.: (B) @) Hin - LM.RbijukumargBelum ada peringkat
- Electricity: The Voltmeter As An Ohmic Resistor in A CircuitDokumen3 halamanElectricity: The Voltmeter As An Ohmic Resistor in A CircuitDaniel Felipe Lugo SilvaBelum ada peringkat
- Voice Data Video CrosswalkDokumen11 halamanVoice Data Video CrosswalkJulio SibrianBelum ada peringkat
- VLSI Design SyllabusDokumen2 halamanVLSI Design SyllabusMr. Kishore Ajay Kumar AyyalaBelum ada peringkat
- THAT 4301 DatasheetDokumen12 halamanTHAT 4301 DatasheetkelvinBelum ada peringkat
- Cadence Ams - Inv3Dokumen10 halamanCadence Ams - Inv3Matthew ThomasBelum ada peringkat
- RPT Physics STPM Term 2 2020Dokumen8 halamanRPT Physics STPM Term 2 2020marcella silunBelum ada peringkat
- Lnk3202/3204-6, Lnk3294 & Lnk3296 Linkswitch-Tn2 FamilyDokumen26 halamanLnk3202/3204-6, Lnk3294 & Lnk3296 Linkswitch-Tn2 FamilyrolandseBelum ada peringkat
- General Description: Hex Non-Inverting HIGH-to-LOW Level ShifterDokumen14 halamanGeneral Description: Hex Non-Inverting HIGH-to-LOW Level ShifterkadriBelum ada peringkat
- PN3565 Transistor NPNDokumen1 halamanPN3565 Transistor NPNJuliansyahBelum ada peringkat
- Kishenpur Grid Station CompleteDokumen39 halamanKishenpur Grid Station CompletepunitkapoorBelum ada peringkat
- Designing A Chip SASE 2012Dokumen104 halamanDesigning A Chip SASE 2012sabareeBelum ada peringkat
- A New Low-Melting-Point Aluminum BrazeDokumen8 halamanA New Low-Melting-Point Aluminum BrazeA K SinghBelum ada peringkat
- Flexible Organic Light Emitting Diode (OLED) : MEEN 3344Dokumen7 halamanFlexible Organic Light Emitting Diode (OLED) : MEEN 3344juhi993Belum ada peringkat
- STPS30H100C: 100 V Power Schottky RectifierDokumen12 halamanSTPS30H100C: 100 V Power Schottky RectifierPablo AllosiaBelum ada peringkat
- Isc N-Channel MOSFET Transistor IRFR7540, IIRFR7540: INCHANGE SemiconductorDokumen2 halamanIsc N-Channel MOSFET Transistor IRFR7540, IIRFR7540: INCHANGE SemiconductorkalanghoBelum ada peringkat
- Journal of Alloys and Compounds: Wei Li, Zhijun Xu, Ruiqing Chu, Peng Fu, Guozhong ZangDokumen4 halamanJournal of Alloys and Compounds: Wei Li, Zhijun Xu, Ruiqing Chu, Peng Fu, Guozhong ZangSamah SamahBelum ada peringkat
- CXD1265 - CCD Camera Timing GeneratorDokumen24 halamanCXD1265 - CCD Camera Timing Generator40818248Belum ada peringkat
- Ecm Groups Public @pub @eaton @hyd Documents Content PLL 1755Dokumen4 halamanEcm Groups Public @pub @eaton @hyd Documents Content PLL 1755Sofia WilsonBelum ada peringkat
- Electronics Interview QuestionsDokumen8 halamanElectronics Interview QuestionsshyamBelum ada peringkat
- Transistor Tutorial About Bipolar and FET Transistors-NupDokumen2 halamanTransistor Tutorial About Bipolar and FET Transistors-NuplosmilzoBelum ada peringkat
- Insensitive Munitions and Energetic Materials Technology SymposiumDokumen4 halamanInsensitive Munitions and Energetic Materials Technology SymposiumAhmed HamoudaBelum ada peringkat
- Microwave Lab ManualDokumen52 halamanMicrowave Lab ManualDhanish VijayanBelum ada peringkat
- Panasonic Sa-Pm500dbebDokumen121 halamanPanasonic Sa-Pm500dbebDavidBelum ada peringkat