Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Singapore Order FormDokumen1 halamanSingapore Order FormFarhanBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Model of Deceleration Lane Length Calculation Based On QuadraticDokumen11 halamanModel of Deceleration Lane Length Calculation Based On QuadraticFarhanBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- RDMCH 13Dokumen31 halamanRDMCH 13FarhanBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Arahan TeknikDokumen9 halamanArahan TeknikFarhanBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- 40 TransportationDokumen8 halaman40 Transportationmpe1Belum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- LTAP Fact Sheet: How To Address Roadside HazardsDokumen3 halamanLTAP Fact Sheet: How To Address Roadside HazardsFarhanBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Harga Garis Panduan & Arahan Teknik (Jalan) 2002 Jabatan Kerja Raya MalaysiaDokumen3 halamanHarga Garis Panduan & Arahan Teknik (Jalan) 2002 Jabatan Kerja Raya MalaysiaFarhanBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
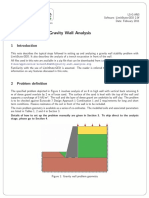
- LS-G-AN3 Gravity Wall Analysis 1Dokumen7 halamanLS-G-AN3 Gravity Wall Analysis 1FarhanBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- PJS 301 5505Dokumen9 halamanPJS 301 5505FarhanBelum ada peringkat
- 860 - PPR Specific Result12a Annex3 PDFDokumen9 halaman860 - PPR Specific Result12a Annex3 PDFFarhanBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- RSA Guidelines Final ReportDokumen20 halamanRSA Guidelines Final ReportFarhanBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- RSA Guidelines Final ReportDokumen47 halamanRSA Guidelines Final ReportFarhanBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- 860 PPR Specific Result12a Annex3Dokumen23 halaman860 PPR Specific Result12a Annex3FarhanBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- 10 RaftDokumen13 halaman10 RaftMqAshladyBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- 10 RaftDokumen46 halaman10 RaftFarhanBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Reinforcement With GeosyntheticsDokumen7 halamanReinforcement With GeosyntheticsFarhanBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Cve 1050Dokumen10 halamanCve 1050FarhanBelum ada peringkat
- 10 5923 C Jce 201402 04Dokumen5 halaman10 5923 C Jce 201402 04FarhanBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Pub 211520Dokumen13 halamanPub 211520FarhanBelum ada peringkat
- Infinite Slope ReportDokumen14 halamanInfinite Slope ReportFarhanBelum ada peringkat
- Shoulders: Chapter 5: Shoulders Pub 23 - Maintenance ManualDokumen8 halamanShoulders: Chapter 5: Shoulders Pub 23 - Maintenance ManualFarhanBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Suryo, Eko Andi Gallage, Chaminda Trigunarsyah, BambangDokumen11 halamanSuryo, Eko Andi Gallage, Chaminda Trigunarsyah, BambangFarhanBelum ada peringkat
- Er139 PDFDokumen64 halamanEr139 PDFFarhanBelum ada peringkat
- Proceeds of Black Shoe Sales Not Going Into Tabung Harapan, Says Minister - Nation - The Star OnlineDokumen6 halamanProceeds of Black Shoe Sales Not Going Into Tabung Harapan, Says Minister - Nation - The Star OnlineFarhanBelum ada peringkat
- Major Shake-Up in Khazanah - Business News - The Star OnlineDokumen5 halamanMajor Shake-Up in Khazanah - Business News - The Star OnlineFarhanBelum ada peringkat
- Stability Analysis of Rainfall-Induced Typical Landslide in Fanjingshan Mountain AreaDokumen12 halamanStability Analysis of Rainfall-Induced Typical Landslide in Fanjingshan Mountain AreaFarhanBelum ada peringkat
- Post TextDokumen3 halamanPost TextFarhanBelum ada peringkat
- P007e FIDES PricelistDokumen5 halamanP007e FIDES PricelistFarhanBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Donation To Help Centre For Kids - Nation - The Star OnlineDokumen7 halamanDonation To Help Centre For Kids - Nation - The Star OnlineFarhanBelum ada peringkat
- Khairy - More GLCs May Tumble After Khazanah Shake-Up - Nation - The Star OnlineDokumen4 halamanKhairy - More GLCs May Tumble After Khazanah Shake-Up - Nation - The Star OnlineFarhanBelum ada peringkat
- Machine Guarding PDFDokumen133 halamanMachine Guarding PDFbrsharmaBelum ada peringkat
- How McAfee Took First Step To Master Data Management SuccessDokumen3 halamanHow McAfee Took First Step To Master Data Management SuccessFirst San Francisco PartnersBelum ada peringkat
- UntitledDokumen50 halamanUntitledapi-118172932Belum ada peringkat
- Workbook Answer Key Unit 9 Useful Stuff - 59cc01951723dd7c77f5bac7 PDFDokumen2 halamanWorkbook Answer Key Unit 9 Useful Stuff - 59cc01951723dd7c77f5bac7 PDFarielveron50% (2)
- Checkpoint R65 QoS Admin GuideDokumen220 halamanCheckpoint R65 QoS Admin GuidePradeep_KNVPBelum ada peringkat
- Divinity Original Sin 2 GrenadesDokumen2 halamanDivinity Original Sin 2 Grenadesbeans54Belum ada peringkat
- Segmented Ball Valves s19 PB en UsDokumen18 halamanSegmented Ball Valves s19 PB en UsMarcos Aurelio Rangel GalvánBelum ada peringkat
- The Basics of Business Management Vol I PDFDokumen284 halamanThe Basics of Business Management Vol I PDFKnjaz Milos100% (1)
- RF Power Meter v2: Preliminary Operator's ManualDokumen10 halamanRF Power Meter v2: Preliminary Operator's Manualsalvatore dalessandroBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Inslution ComaritveDokumen8 halamanInslution Comaritvemusaad AlasbliBelum ada peringkat
- Appexchange Publishing GuideDokumen29 halamanAppexchange Publishing GuideHeatherBelum ada peringkat
- IS 2713.1-3.1980 Lighting Pole PDFDokumen36 halamanIS 2713.1-3.1980 Lighting Pole PDFnavneetBelum ada peringkat
- Perdele Economic B 2VVDokumen4 halamanPerdele Economic B 2VVakitainupufBelum ada peringkat
- Pet CRD CRPDN Adc MBBL MDokumen125 halamanPet CRD CRPDN Adc MBBL MpmellaBelum ada peringkat
- Os Se VB Mis SadDokumen336 halamanOs Se VB Mis SadMuhammad Sikandar DarBelum ada peringkat
- Hotel Fire SafetyDokumen6 halamanHotel Fire Safetyfairus100% (1)
- Application Form For Technical Position: Central Institute of Plastics Engineering & Technology (Cipet)Dokumen8 halamanApplication Form For Technical Position: Central Institute of Plastics Engineering & Technology (Cipet)dev123Belum ada peringkat
- Topic 1 Valve and Instrumentation SymbolsDokumen8 halamanTopic 1 Valve and Instrumentation SymbolshatiniBelum ada peringkat
- Security Audit Technology Training Report To PresentDokumen1 halamanSecurity Audit Technology Training Report To PresentLewis Kang'araBelum ada peringkat
- DjikstraDokumen5 halamanDjikstramanoj1390Belum ada peringkat
- Bomba - Weir - Warman Horizontal Pumps PDFDokumen8 halamanBomba - Weir - Warman Horizontal Pumps PDFWanderson Alcantara100% (1)
- 12 Smart Steps To Building A New HatcheryDokumen2 halaman12 Smart Steps To Building A New HatcherytayyababBelum ada peringkat
- Curriculum Review - PrinciplesDokumen8 halamanCurriculum Review - Principlesa_magomnangBelum ada peringkat
- DORP Action PlanDokumen3 halamanDORP Action PlanSantisas Zai100% (3)
- Urethyn HG 0 - Pi - (Gb-En)Dokumen2 halamanUrethyn HG 0 - Pi - (Gb-En)CriVe OffeBelum ada peringkat
- Philips New Pricelist July 2022Dokumen3 halamanPhilips New Pricelist July 2022PravinBelum ada peringkat
- Tuirum Adhaar Update Tur ListDokumen4 halamanTuirum Adhaar Update Tur ListLalthlamuana MuanaBelum ada peringkat
- Requirements For Transferees FinalDokumen29 halamanRequirements For Transferees FinalKaren GedalangaBelum ada peringkat
- Vocal Mixing TipsDokumen16 halamanVocal Mixing Tipsshawn7800Belum ada peringkat
- Hexoloy SP Sic TdsDokumen4 halamanHexoloy SP Sic TdsAnonymous r3MoX2ZMTBelum ada peringkat
- $100M Offers: How to Make Offers So Good People Feel Stupid Saying NoDari Everand$100M Offers: How to Make Offers So Good People Feel Stupid Saying NoPenilaian: 5 dari 5 bintang5/5 (23)
- The Millionaire Fastlane, 10th Anniversary Edition: Crack the Code to Wealth and Live Rich for a LifetimeDari EverandThe Millionaire Fastlane, 10th Anniversary Edition: Crack the Code to Wealth and Live Rich for a LifetimePenilaian: 4.5 dari 5 bintang4.5/5 (90)
- Summary of Noah Kagan's Million Dollar WeekendDari EverandSummary of Noah Kagan's Million Dollar WeekendPenilaian: 5 dari 5 bintang5/5 (1)
- $100M Leads: How to Get Strangers to Want to Buy Your StuffDari Everand$100M Leads: How to Get Strangers to Want to Buy Your StuffPenilaian: 5 dari 5 bintang5/5 (19)