Anda mungkin juga menyukai
- Ingenieria de Faja TransportadoraDokumen64 halamanIngenieria de Faja Transportadorajoule357Belum ada peringkat
- Circuitos Amplificadores - Amplificador Clase BDokumen6 halamanCircuitos Amplificadores - Amplificador Clase BLuis AndreBelum ada peringkat
- Trabajo Bloque 1Dokumen15 halamanTrabajo Bloque 1jake kawaiiBelum ada peringkat
- Transmisión de PotenciaDokumen40 halamanTransmisión de Potenciamattyas Bernal100% (2)
- Cálculo Sistema de FrenosDokumen45 halamanCálculo Sistema de FrenosVíctor Márquez RodríguezBelum ada peringkat
- Posturas ForzadasDokumen81 halamanPosturas ForzadasgregorissegoviaBelum ada peringkat
- Asincronías en Ventilación MecánicaDokumen36 halamanAsincronías en Ventilación MecánicaDavid Gresky Avellaneda Talledo100% (2)
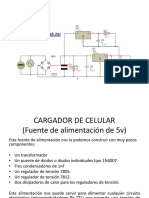
- Cargador de CelularDokumen10 halamanCargador de CelularDiego PérezBelum ada peringkat
- Práctica 2 José Carlos Gil 201627273 SAysA PDFDokumen10 halamanPráctica 2 José Carlos Gil 201627273 SAysA PDFJosé Carlos Gil PrietoBelum ada peringkat
- Método de TustinDokumen6 halamanMétodo de TustinTheMarce265Belum ada peringkat
- Formulario IIDokumen56 halamanFormulario IIAlejandro Lucena GarceranBelum ada peringkat
- Práctica No. 8 TroceadoresDokumen6 halamanPráctica No. 8 TroceadoresLuis Felipe Salazar SarmientoBelum ada peringkat
- Informe Control PidDokumen9 halamanInforme Control PidByron ArgosBelum ada peringkat
- SensoresTemperaturaLuzFrecuenciaDokumen8 halamanSensoresTemperaturaLuzFrecuenciaSergio Cantillo LunaBelum ada peringkat
- Ensayo Tipos de OsciladoresDokumen17 halamanEnsayo Tipos de OsciladoresMiguel Angel Flores MojicaBelum ada peringkat
- Comunicación Serial MatlabDokumen9 halamanComunicación Serial MatlabDavid YHBelum ada peringkat
- Termómetro digital binario LM35 ADC0804Dokumen5 halamanTermómetro digital binario LM35 ADC0804Ivan Plasencia100% (1)
- Practica7 SeñalesDokumen21 halamanPractica7 SeñalesAngel Vidals VazquezBelum ada peringkat
- Diseño de controladores P, PI y PID para un motor DC utilizando SISOTOOL de MATLABDokumen31 halamanDiseño de controladores P, PI y PID para un motor DC utilizando SISOTOOL de MATLABNoéArguetaBelum ada peringkat
- Diagrama de BodeDokumen22 halamanDiagrama de BodejoseBelum ada peringkat
- Inversores y cicloconvertidores modulados por ancho de pulsoDokumen59 halamanInversores y cicloconvertidores modulados por ancho de pulsoUvaldo RamirezBelum ada peringkat
- El Transistor Como AmplificadorDokumen4 halamanEl Transistor Como AmplificadorMARTIN RODOLFO LIZOLA GOMEZBelum ada peringkat
- Reconocimiento de Voz MatlabDokumen4 halamanReconocimiento de Voz MatlabMiguel Angel Silva FurBelum ada peringkat
- Trabajo de Convertidor Buck Simulación y GalvanizadoDokumen9 halamanTrabajo de Convertidor Buck Simulación y GalvanizadoDavid DavidBelum ada peringkat
- Sistema de Diagnóstico Automotriz - IEEEDokumen2 halamanSistema de Diagnóstico Automotriz - IEEEstaff0550% (1)
- Expo - Diagrama de BodeDokumen129 halamanExpo - Diagrama de BodesamuelBelum ada peringkat
- Pract. CuatroDokumen13 halamanPract. CuatroJOSE DANIEL ADAME SUAZOBelum ada peringkat
- Generador de C.C. DERIVADO AUTOEXCITADODokumen5 halamanGenerador de C.C. DERIVADO AUTOEXCITADOLuiis Muciño100% (1)
- Cuadro Comparativo de Características de Las Turbinas EólicasDokumen1 halamanCuadro Comparativo de Características de Las Turbinas EólicasJose Andres Gonzalez MartinezBelum ada peringkat
- Guia Laboratorio TriacDokumen11 halamanGuia Laboratorio TriacPEDROBelum ada peringkat
- PicDokumen14 halamanPicxLMx LuNa7iicKzBelum ada peringkat
- MultivibradoresDokumen39 halamanMultivibradoresGabriel Alejandro Astete VargasBelum ada peringkat
- Análisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoDokumen4 halamanAnálisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoLuilli Angel EsquincaBelum ada peringkat
- Circuito codificador de prioridad 16-4Dokumen11 halamanCircuito codificador de prioridad 16-4Luis FelipeBelum ada peringkat
- TroceadoresDokumen20 halamanTroceadoresAmilcar Alvarez PeraltaBelum ada peringkat
- VHDL Flip Flops y RegistrosDokumen7 halamanVHDL Flip Flops y RegistrosEdwin LemasBelum ada peringkat
- Control PID Discreto y ConexionXBeeDokumen29 halamanControl PID Discreto y ConexionXBeeAlexander ValenciaBelum ada peringkat
- Lab 13 Control Monoarticular Realimentado PDFDokumen2 halamanLab 13 Control Monoarticular Realimentado PDFMarc LlBelum ada peringkat
- Especificaciones Dominio FrecuenciaDokumen6 halamanEspecificaciones Dominio FrecuenciaArthur RamXelBelum ada peringkat
- Taller Excel RealizadoDokumen22 halamanTaller Excel RealizadoGabriel mario Tapia pardoBelum ada peringkat
- CuestionarioDokumen13 halamanCuestionarioYenny Ortega100% (2)
- Funcion TrapeoidalDokumen30 halamanFuncion TrapeoidalCristian DominguezBelum ada peringkat
- Relaciondeejercicios Tema 1Dokumen2 halamanRelaciondeejercicios Tema 1Henry Martinez Jr.Belum ada peringkat
- Informe Funcion de TransferenciaDokumen5 halamanInforme Funcion de TransferenciaLeonardo CorredorBelum ada peringkat
- Reporte de Filtro Pasa BajasDokumen8 halamanReporte de Filtro Pasa BajasBeto RoBelum ada peringkat
- 17 Dispositivos de Disparo Ujt y PutDokumen9 halaman17 Dispositivos de Disparo Ujt y PutRicardo LopezBelum ada peringkat
- Labo 4 Filtros DigitalesDokumen13 halamanLabo 4 Filtros DigitaleswilliamBelum ada peringkat
- Practica 4 Lab Electronica 2Dokumen4 halamanPractica 4 Lab Electronica 2Josué ValenciaBelum ada peringkat
- Equipo 2 PWM PDFDokumen8 halamanEquipo 2 PWM PDFJavier AguilarBelum ada peringkat
- Aplicaciones Basicas El Oscilador de Schmitt y Generador de FuncionesDokumen8 halamanAplicaciones Basicas El Oscilador de Schmitt y Generador de FuncionesDiego CandoBelum ada peringkat
- Diseño de filtros con capacitores para rectificadoresDokumen7 halamanDiseño de filtros con capacitores para rectificadoresalexBelum ada peringkat
- Problemas Resultos de La Priemra UnidadDokumen6 halamanProblemas Resultos de La Priemra UnidadFabrizzio SeclénBelum ada peringkat
- Variador de velocidad con frenado regenerativoDokumen20 halamanVariador de velocidad con frenado regenerativoRoland CaixaBelum ada peringkat
- Turbina en SolidworkDokumen21 halamanTurbina en SolidworklucianoBelum ada peringkat
- CAPITULO 2 LED Marco Teorico e HistoricoDokumen6 halamanCAPITULO 2 LED Marco Teorico e HistoricoMiguel Angel Rosales MartinezBelum ada peringkat
- Características de Un TransformadorDokumen5 halamanCaracterísticas de Un TransformadorLaura FlorezBelum ada peringkat
- PLC S7-1200 señales analógicas y simulación PLCSimDokumen10 halamanPLC S7-1200 señales analógicas y simulación PLCSimFranklin BravoBelum ada peringkat
- Push PullDokumen7 halamanPush PullmiguelangelbosiBelum ada peringkat
- 2da Practica PotenciaDokumen7 halaman2da Practica PotenciabrandoBelum ada peringkat
- Introduccin A La Respuesta en FrecuenciaDokumen12 halamanIntroduccin A La Respuesta en FrecuenciaAda HofstetterBelum ada peringkat
- Control de Potencia Con El SCRDokumen15 halamanControl de Potencia Con El SCRPipe CastilloBelum ada peringkat
- Sistemas Roboticos BioloidDokumen33 halamanSistemas Roboticos BioloidLeonardoCamposVazquezBelum ada peringkat
- T1-Ui-Sistemas CableadosDokumen4 halamanT1-Ui-Sistemas CableadosjesustarinBelum ada peringkat
- 08 Reporte, Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenDokumen23 halaman08 Reporte, Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenFernando AlbarránBelum ada peringkat
- Sistemas DiscretosDokumen32 halamanSistemas DiscretosVanessa DelgadoBelum ada peringkat
- Semaforo Inteligente S7 - 1200 PDFDokumen3 halamanSemaforo Inteligente S7 - 1200 PDFJAIRO ALEJANDRO CHICAIZA SANGURIMABelum ada peringkat
- Semaforo Inteligente S7 - 1200 PDFDokumen3 halamanSemaforo Inteligente S7 - 1200 PDFJAIRO ALEJANDRO CHICAIZA SANGURIMABelum ada peringkat
- Semaforo Inteligente S7 - 1200 PDFDokumen3 halamanSemaforo Inteligente S7 - 1200 PDFJAIRO ALEJANDRO CHICAIZA SANGURIMABelum ada peringkat
- Semaforo Inteligente S7 - 1200 PDFDokumen3 halamanSemaforo Inteligente S7 - 1200 PDFJAIRO ALEJANDRO CHICAIZA SANGURIMABelum ada peringkat
- Control Lógico Programable PLCDokumen11 halamanControl Lógico Programable PLCSabrina JeriaBelum ada peringkat
- Proposición Del 9 de Octubre 1967 Sobre El Psicoanalista de La EscuelaDokumen10 halamanProposición Del 9 de Octubre 1967 Sobre El Psicoanalista de La EscuelaJuan ConforteBelum ada peringkat
- Planificación 3° Sin Rayar (Para Nearpod)Dokumen7 halamanPlanificación 3° Sin Rayar (Para Nearpod)Pitita FloresBelum ada peringkat
- Guia de Problemas N 5Dokumen5 halamanGuia de Problemas N 5Josue Isac Salomon LandaBelum ada peringkat
- Estudio Experimental de Estructuras de Bloques de ConcretoDokumen25 halamanEstudio Experimental de Estructuras de Bloques de ConcretomariolunaqBelum ada peringkat
- Ejercicios de Investigacion de Operaciones IIDokumen6 halamanEjercicios de Investigacion de Operaciones IIkevin david estradaBelum ada peringkat
- Guia Semana 3Dokumen19 halamanGuia Semana 3Juan Sebastian Uribe MartinezBelum ada peringkat
- Lab 8 ElectricaDokumen8 halamanLab 8 ElectricaEdgardoBelum ada peringkat
- Matemáticas financieras esencialesDokumen10 halamanMatemáticas financieras esencialesSebastian GonzalezBelum ada peringkat
- ANOVADokumen2 halamanANOVAgabriel rodriguez mengualBelum ada peringkat
- Diseño de pavimentos rígidosDokumen16 halamanDiseño de pavimentos rígidosAlexander Ponce VelardeBelum ada peringkat
- Bomba Manual Enerpac P392Dokumen2 halamanBomba Manual Enerpac P392Carlos Alberto Cortes EsquivelBelum ada peringkat
- Programación Orientada A Objetos (Emp)Dokumen16 halamanProgramación Orientada A Objetos (Emp)AlejandroBelum ada peringkat
- Trabajo Práctico - Resistencias de Alto ValorDokumen15 halamanTrabajo Práctico - Resistencias de Alto ValormilezequielBelum ada peringkat
- Ley de Ohm, Resistencias (Circuitos Serie, Paralelo, Mixto y Calculo)Dokumen3 halamanLey de Ohm, Resistencias (Circuitos Serie, Paralelo, Mixto y Calculo)janpolskiBelum ada peringkat
- Plan de Minado 2017 Compañía Minera Milpo S.A.A. Unidad AtacochaDokumen56 halamanPlan de Minado 2017 Compañía Minera Milpo S.A.A. Unidad AtacochaDonny Laurente Raimundo100% (1)
- Similitudes y Diferencias Entre Tecnologias de Power MosfetDokumen2 halamanSimilitudes y Diferencias Entre Tecnologias de Power MosfetWilliam SolarteBelum ada peringkat
- Ortografía PDFDokumen53 halamanOrtografía PDFLala FridaBelum ada peringkat
- Paso 5 - Sistemas Agroforestales - 1Dokumen17 halamanPaso 5 - Sistemas Agroforestales - 1lipicepeBelum ada peringkat
- Grupo 7Dokumen15 halamanGrupo 7Hector CondeBelum ada peringkat
- Ejercicios para El Primer Bloque de Matemáticas IDokumen7 halamanEjercicios para El Primer Bloque de Matemáticas IluciaBelum ada peringkat
- Banco de Udep 2020 01Dokumen8 halamanBanco de Udep 2020 01maryBelum ada peringkat
- ET RiegoDokumen22 halamanET RiegoJuan Manuel Prieto MontesBelum ada peringkat
- Definicion R&RDokumen4 halamanDefinicion R&RIng. Alejandro Hernández B.Belum ada peringkat
- Inf.3 Nivel Goniometrico2Dokumen37 halamanInf.3 Nivel Goniometrico2Piter WellsBelum ada peringkat
- IndeterminismoDokumen37 halamanIndeterminismoFrancis MarambioBelum ada peringkat