Anda mungkin juga menyukai
- Diseño de CalderaDokumen175 halamanDiseño de CalderaMateo AponteBelum ada peringkat
- Ejercicios PLSQLDokumen6 halamanEjercicios PLSQLJulioBelum ada peringkat
- El Desarrollo SustentablesDokumen4 halamanEl Desarrollo SustentablesRosa MariaBelum ada peringkat
- Movimiento OndulatorioDokumen10 halamanMovimiento Ondulatorioluis enriqueBelum ada peringkat
- VelocidadDokumen3 halamanVelocidadluis enriqueBelum ada peringkat
- Que Es Un Plano InclinadoDokumen13 halamanQue Es Un Plano Inclinadoluis enriqueBelum ada peringkat
- Clasificacion de Las PalacasDokumen4 halamanClasificacion de Las Palacasluis enriqueBelum ada peringkat
- PoleaDokumen9 halamanPolealuis enriqueBelum ada peringkat
- Caida LibreDokumen2 halamanCaida Libreluis enriqueBelum ada peringkat
- Herramientas EquiposDokumen7 halamanHerramientas EquiposWILBERBelum ada peringkat
- Ssistema de Coordenadas CartesianasDokumen20 halamanSsistema de Coordenadas Cartesianasluis enriqueBelum ada peringkat
- El Test Del Dibujo de La Figura Humana de Karen Machover Utiliza Una Técnica de Aplicación Sumamente SencillaDokumen17 halamanEl Test Del Dibujo de La Figura Humana de Karen Machover Utiliza Una Técnica de Aplicación Sumamente Sencillaluis enriqueBelum ada peringkat
- Torno CNCDokumen2 halamanTorno CNCluis enriqueBelum ada peringkat
- Calculo RoscasDokumen15 halamanCalculo Roscasigallego0% (1)
- Que Es La BiomasaDokumen2 halamanQue Es La Biomasaluis enriqueBelum ada peringkat
- Como Tiene Energia Los Seres HumanosDokumen2 halamanComo Tiene Energia Los Seres Humanosluis enriqueBelum ada peringkat
- Mantenimiento de CalderasDokumen2 halamanMantenimiento de Calderasedwar_12100% (1)
- Maltrato AnimalDokumen7 halamanMaltrato Animalluis enriqueBelum ada peringkat
- Estructura General de Un Proyecto de Titulacion o InvestigacionDokumen5 halamanEstructura General de Un Proyecto de Titulacion o Investigacionluis enriqueBelum ada peringkat
- Maltrato AnimalDokumen7 halamanMaltrato Animalluis enriqueBelum ada peringkat
- Tipologia de Calderas VIESSMANNDokumen30 halamanTipologia de Calderas VIESSMANNOswaldoRiosBermudezBelum ada peringkat
- Reduccion de Scrap Al 30Dokumen1 halamanReduccion de Scrap Al 30luis enriqueBelum ada peringkat
- Informe Final Práctica Profesional Estudiante Jefry Chaves Jiménez PDFDokumen401 halamanInforme Final Práctica Profesional Estudiante Jefry Chaves Jiménez PDFluis enriqueBelum ada peringkat
- Conceptos Generales de La Psicologia Del Desarrollo (Autoguardado)Dokumen14 halamanConceptos Generales de La Psicologia Del Desarrollo (Autoguardado)luis enriqueBelum ada peringkat
- Qué Piensas Cuando Decimos TerapiaDokumen1 halamanQué Piensas Cuando Decimos Terapialuis enriqueBelum ada peringkat
- 401-1209 - Aprovechamiento Del Bagazo Industrial de Cafe Como BiomasaDokumen150 halaman401-1209 - Aprovechamiento Del Bagazo Industrial de Cafe Como Biomasaluis enriqueBelum ada peringkat
- Maltrato AnimalDokumen7 halamanMaltrato Animalluis enriqueBelum ada peringkat
- Intercambiadores de CalorDokumen66 halamanIntercambiadores de Calorluis enriqueBelum ada peringkat
- DESGASIFICADORESDokumen98 halamanDESGASIFICADORESluis enriqueBelum ada peringkat
- Sistema Agua-VaporDokumen11 halamanSistema Agua-Vaporluis enriqueBelum ada peringkat
- 6 Vibraciones PDFDokumen4 halaman6 Vibraciones PDFYuyita BombomBelum ada peringkat
- Calderas Principios y Componentes 1Dokumen38 halamanCalderas Principios y Componentes 1Patricio Jimenez AlarconBelum ada peringkat
- Metodo de Las Dos FasesDokumen20 halamanMetodo de Las Dos FasesIlse Ferman100% (1)
- Actividad de La Unid. 1+trabajo+en++++equipoDokumen3 halamanActividad de La Unid. 1+trabajo+en++++equipoLuis Alberto Feliz VillanuevaBelum ada peringkat
- Verbos para CompetenciasDokumen3 halamanVerbos para CompetenciasDoris BrensBelum ada peringkat
- Flujo de Cantidades Físicas Entre DepartamentosDokumen6 halamanFlujo de Cantidades Físicas Entre DepartamentosGabo García GranizoBelum ada peringkat
- Estado Del Arte Iso 50001Dokumen7 halamanEstado Del Arte Iso 50001Eric LedesmaBelum ada peringkat
- Equinox 2019 Manual de PropietarioDokumen402 halamanEquinox 2019 Manual de PropietarioLeo RomeroBelum ada peringkat
- Trabajo de InvestigacionDokumen12 halamanTrabajo de InvestigacionMaria FernanD'aBelum ada peringkat
- Indutecnica - Tablero 0520-Tdi-101 - 521-7L61-118Dokumen11 halamanIndutecnica - Tablero 0520-Tdi-101 - 521-7L61-118ozzneBelum ada peringkat
- Lab 2 (19-I)Dokumen7 halamanLab 2 (19-I)Walther JesusBelum ada peringkat
- Elementos de Una PlaneaciónDokumen1 halamanElementos de Una PlaneaciónLuis Ignacio Alemán ArrietaBelum ada peringkat
- Pagina 96 InvestigaciónDokumen2 halamanPagina 96 InvestigaciónJhon EduardBelum ada peringkat
- Mercado Mayorista - Memoria DescriptivaDokumen4 halamanMercado Mayorista - Memoria Descriptivamelanycg06Belum ada peringkat
- Circular 2 Servicio Comunitario PNFCPDokumen2 halamanCircular 2 Servicio Comunitario PNFCPArusi AlvarezBelum ada peringkat
- Aditivo Reologico BK 127Dokumen1 halamanAditivo Reologico BK 127Jovany AlemanBelum ada peringkat
- Preoperacional CanguroDokumen3 halamanPreoperacional CanguroVero ZapataBelum ada peringkat
- Lista de Empaque Molino La Perla PLS 6822 CTNR 5Dokumen5 halamanLista de Empaque Molino La Perla PLS 6822 CTNR 5Marco SolísBelum ada peringkat
- Una Red de As Esta Conectada Tanto Por Hardware Como Por SoftwareDokumen10 halamanUna Red de As Esta Conectada Tanto Por Hardware Como Por SoftwareThor Hijo de OdinBelum ada peringkat
- Resumen Sobre La Norma de Buenas Practicas de LaboratorioDokumen5 halamanResumen Sobre La Norma de Buenas Practicas de LaboratorioDavid SanabriaBelum ada peringkat
- Evaluacion Lapbook Primero BDokumen2 halamanEvaluacion Lapbook Primero BEliecer BustamanteBelum ada peringkat
- Aprenda A Crear Un Icono de Lápiz Lindo en Adobe IllustratorDokumen17 halamanAprenda A Crear Un Icono de Lápiz Lindo en Adobe Illustratorjoma988Belum ada peringkat
- Model Canvas FormatoDokumen4 halamanModel Canvas FormatoTatianaZambranoAlíBelum ada peringkat
- CAPITULO III - Placas Al CarbonoDokumen8 halamanCAPITULO III - Placas Al CarbonoJonathan Vasquez LBelum ada peringkat
- Calculos de Chavetas - Uto - FniDokumen4 halamanCalculos de Chavetas - Uto - FniDavidBelum ada peringkat
- RG21UCS - Operator's Manual ESDokumen186 halamanRG21UCS - Operator's Manual ESChew BaccaBelum ada peringkat
- Proceso Logistico en PuertoDokumen7 halamanProceso Logistico en PuertoMenta OrquideaBelum ada peringkat
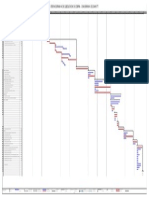
- Cromograma en GanntDokumen1 halamanCromograma en GanntrykygonzalesBelum ada peringkat
- Planificacion en VenezuelaDokumen11 halamanPlanificacion en VenezuelaMaria Isabel EnriquezBelum ada peringkat
- Laboratorio Electronica de Potencia-18-22Dokumen5 halamanLaboratorio Electronica de Potencia-18-22Ariel DutanBelum ada peringkat