Anda mungkin juga menyukai
- Control de Posicion Motor - ElectronicaDokumen5 halamanControl de Posicion Motor - ElectronicaErick Stanley Arevalo LopezBelum ada peringkat
- Todo Robot RPPDokumen62 halamanTodo Robot RPPAntonio Valdez RuizBelum ada peringkat
- Practica 8 Encoder IncrementalDokumen10 halamanPractica 8 Encoder IncrementalFernando Gutierrez OportoBelum ada peringkat
- Electrónica de Potencia-Unidad 2-Gonzalez Zapata Luis Jesus.Dokumen30 halamanElectrónica de Potencia-Unidad 2-Gonzalez Zapata Luis Jesus.LuisJesusGonzalezZapata100% (1)
- Respuesta estado estable función forzante RLDokumen7 halamanRespuesta estado estable función forzante RLjuan piñerosBelum ada peringkat
- Interrupciones PICDokumen3 halamanInterrupciones PICLuigi Yaksetig LoayzaBelum ada peringkat
- Aplicaciones de Los Transformadores en La Ingeniería MecatrónicaDokumen20 halamanAplicaciones de Los Transformadores en La Ingeniería MecatrónicaEmma Arista100% (1)
- Ecuación de Gruebler calcula grados libertad mecanismosDokumen5 halamanEcuación de Gruebler calcula grados libertad mecanismosSvart BegravelseBelum ada peringkat
- Control Analógico de Posición de Motor DCDokumen5 halamanControl Analógico de Posición de Motor DCBryan Samos AlbornozBelum ada peringkat
- Sistemas de Control Digital RetenedoresDokumen40 halamanSistemas de Control Digital RetenedoresPedro CarmonaBelum ada peringkat
- Practica 2 EstacionamientoDokumen7 halamanPractica 2 EstacionamientoJOAQUIN CALDERON ROSASBelum ada peringkat
- Proyecto CafeteraDokumen10 halamanProyecto Cafeteraeliseo rodea100% (2)
- Practica 5 Motor Paso A PasoDokumen20 halamanPractica 5 Motor Paso A PasoLeonardo GonzalezBelum ada peringkat
- c2. Aplicaciones Del OpAmpDokumen30 halamanc2. Aplicaciones Del OpAmpSandor GomezBelum ada peringkat
- Convertidores Cuk - ResonantesDokumen7 halamanConvertidores Cuk - ResonantesSanty FloresBelum ada peringkat
- Seguidor de línea Arduino con sensoresDokumen7 halamanSeguidor de línea Arduino con sensorestortuga67Belum ada peringkat
- Ensayo"Inversor DC/AC de Onda Pura para Cargas Monofasicas A Traves de SPWM Con Microcontroladores"Dokumen4 halamanEnsayo"Inversor DC/AC de Onda Pura para Cargas Monofasicas A Traves de SPWM Con Microcontroladores"Jaime Potes PardoBelum ada peringkat
- Dinamica de Un Robot de 2 Grados de LibertadDokumen3 halamanDinamica de Un Robot de 2 Grados de LibertadDaniel GasGaxBelum ada peringkat
- Laboratorio 5Dokumen15 halamanLaboratorio 5Eddy Morillo50% (2)
- Conversion ElectromagneticaDokumen2 halamanConversion Electromagneticajose 99Belum ada peringkat
- Levitador NeumaticoDokumen8 halamanLevitador NeumaticoJulianSanchezBelum ada peringkat
- Robot Seguidor Resuelve LaberintosDokumen9 halamanRobot Seguidor Resuelve LaberintosAlejandro RojasBelum ada peringkat
- PC3 LC3 DinamicaDokumen14 halamanPC3 LC3 DinamicaLalo Paolo Perez Camilo100% (1)
- Componentes electroneumáticaDokumen2 halamanComponentes electroneumáticaIrma SotoBelum ada peringkat
- Circuitos de acondicionamiento para sensores resistivosDokumen5 halamanCircuitos de acondicionamiento para sensores resistivosmohamed0% (1)
- Reloj Digital 24 HorasDokumen5 halamanReloj Digital 24 HorasAdriana tofiño villafañe100% (1)
- Linea Del Tiempo Dispositivos de PotenciaDokumen2 halamanLinea Del Tiempo Dispositivos de Potencialilito16100% (1)
- Tema 5Dokumen50 halamanTema 5oskarperuBelum ada peringkat
- Circuito de Control y Potencia en La CargaDokumen12 halamanCircuito de Control y Potencia en La Cargajuan carlosBelum ada peringkat
- Proyecto Final IGBTDokumen18 halamanProyecto Final IGBTReadlion70% (1)
- Análisis de Función de Transferencia de Tercer OrdenDokumen7 halamanAnálisis de Función de Transferencia de Tercer OrdenEduardo PastorBelum ada peringkat
- Informe Semaforo Con Flip FlopDokumen5 halamanInforme Semaforo Con Flip FlopJulian RamirezBelum ada peringkat
- Compendio de Practicas Sensores 2005Dokumen50 halamanCompendio de Practicas Sensores 2005zhefyroBelum ada peringkat
- Pid LM324Dokumen2 halamanPid LM324gabriel silva díaz0% (1)
- Control EsDokumen4 halamanControl EsLéandró Sáx100% (1)
- Alternadores TrifásicosDokumen2 halamanAlternadores TrifásicosIrving Jose Anton67% (6)
- LAB1 - Control de Posición Angular de Un Motor DCDokumen5 halamanLAB1 - Control de Posición Angular de Un Motor DCJorge Mideros ArboledaBelum ada peringkat
- Nomogramas Cilindros NeumáticosDokumen5 halamanNomogramas Cilindros NeumáticosXavier Ramos OjedaBelum ada peringkat
- Tutorial 1 (Comunicación de LabVIEW Con SolidWorks) PDFDokumen31 halamanTutorial 1 (Comunicación de LabVIEW Con SolidWorks) PDFLuis Miguel Zabala GualteroBelum ada peringkat
- Implementación de controlador PID analógico con amplificadores operacionalesDokumen18 halamanImplementación de controlador PID analógico con amplificadores operacionalesMiguelSalgadoBelum ada peringkat
- 5 10 19 24 MecanismosDokumen4 halaman5 10 19 24 Mecanismoshector ortizBelum ada peringkat
- Programar PLC mediante lenguaje LadderDokumen7 halamanProgramar PLC mediante lenguaje LadderMauro M Janco BernabeBelum ada peringkat
- Ejercicios de Número de Grados de LibertadDokumen3 halamanEjercicios de Número de Grados de Libertadmark0% (2)
- Guia 02 Taladro SemiautomatizadoDokumen4 halamanGuia 02 Taladro SemiautomatizadoDavid ChisaguanoBelum ada peringkat
- Segundo Previo Grupo BDokumen1 halamanSegundo Previo Grupo BJaider Vergel Pabon100% (1)
- Labvolt GuiaDokumen6 halamanLabvolt GuiaWilsonBelum ada peringkat
- Algoritmo de Denavit HartenbergDokumen15 halamanAlgoritmo de Denavit HartenbergCristian AndrangoBelum ada peringkat
- Manejo y almacenamiento de lubricantesDokumen20 halamanManejo y almacenamiento de lubricanteskevas24100% (1)
- Problema 7.7 Diseño de Ingenieria ShigleyDokumen15 halamanProblema 7.7 Diseño de Ingenieria ShigleyRuzo Lopez RuizBelum ada peringkat
- Generador de Funciones Con Lm741Dokumen2 halamanGenerador de Funciones Con Lm741sargon33375% (4)
- Luis Gerardo G.V - Practica #3 AuditorioDokumen2 halamanLuis Gerardo G.V - Practica #3 AuditorioLuis Gerardo Gonzalez VelozBelum ada peringkat
- Practica Reloj DigitalDokumen4 halamanPractica Reloj DigitalJuan SantiagoBelum ada peringkat
- Lugar Geométrico Circuitos EléctricosDokumen12 halamanLugar Geométrico Circuitos EléctricosGeraldine YeffeBelum ada peringkat
- Guia de Practicas Taller II Abril 2016Dokumen82 halamanGuia de Practicas Taller II Abril 2016ABelum ada peringkat
- Circuito de Cruce Por 0Dokumen5 halamanCircuito de Cruce Por 0Mario J. Díaz ZegarraBelum ada peringkat
- Análisis de Posición Del Mecanismo de Biela-Manivela-CorrederaDokumen9 halamanAnálisis de Posición Del Mecanismo de Biela-Manivela-CorrederaAlex L. Puerto100% (3)
- 190B0709 Donato Domínguez Tarea2 U3Dokumen5 halaman190B0709 Donato Domínguez Tarea2 U3Donato RicoBelum ada peringkat
- ENSAYO - Brazo RoboticoDokumen4 halamanENSAYO - Brazo RoboticoHernan SABelum ada peringkat
- Banda TransportadoraDokumen14 halamanBanda Transportadorastrikerluis13Belum ada peringkat
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDari EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoBelum ada peringkat
- Aws D1.1-2015-Espanol-Lista de Tablas PDFDokumen3 halamanAws D1.1-2015-Espanol-Lista de Tablas PDFDaniel RiveraBelum ada peringkat
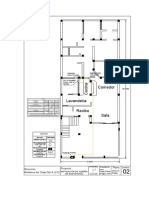
- Vista en Planta Instalacion de Tuberia PealpeDokumen1 halamanVista en Planta Instalacion de Tuberia PealpeEdgar Joel Ruiz PradoBelum ada peringkat
- H 50 N 01 A 571 NLNJT 38 Tksllne 216 LMBDokumen4 halamanH 50 N 01 A 571 NLNJT 38 Tksllne 216 LMBWinny leslyBelum ada peringkat
- Examen de FisicaDokumen4 halamanExamen de FisicaLuisBelum ada peringkat
- RE05 Mendoza LabMats1GP7Dokumen8 halamanRE05 Mendoza LabMats1GP7Annie LealBelum ada peringkat
- 4.2 en La Generacion de Energia (Brandon)Dokumen5 halaman4.2 en La Generacion de Energia (Brandon)Brandon Valdez100% (1)
- Laboratorio 1 - Tracción en VarillaDokumen7 halamanLaboratorio 1 - Tracción en VarillaMichael David CamachoBelum ada peringkat
- Motor IvecoDokumen3 halamanMotor IvecofeniBelum ada peringkat
- Viscosidad y Mecanismo Del Transpote PDFDokumen82 halamanViscosidad y Mecanismo Del Transpote PDFhepl AbsBelum ada peringkat
- Trabajo de ClaseDokumen9 halamanTrabajo de ClaseWily Melendres PalmaBelum ada peringkat
- Unidad 2.1 - Frenos y Embragues. FrenosbDokumen16 halamanUnidad 2.1 - Frenos y Embragues. FrenosbLuis AlonsoBelum ada peringkat
- Practica N 2 Sistema CerradoDokumen21 halamanPractica N 2 Sistema CerradoMaribelBelum ada peringkat
- Estabilidad de Un Cuerpo FlotanteDokumen3 halamanEstabilidad de Un Cuerpo FlotanteAstridBelum ada peringkat
- Leyes de La TermodinámicaDokumen2 halamanLeyes de La TermodinámicaSebastian MoralesBelum ada peringkat
- Importancia de La Termodinámica en La Vida DiariaDokumen2 halamanImportancia de La Termodinámica en La Vida DiariaAndrés Escobar100% (1)
- Estaciones de Bombeo y de CompresionDokumen24 halamanEstaciones de Bombeo y de CompresionFlores AlbertoBelum ada peringkat
- Las Poleas Son Mecanismos Capaces de Transmitir Fuerza y MoDokumen4 halamanLas Poleas Son Mecanismos Capaces de Transmitir Fuerza y MoedutecnoBelum ada peringkat
- TEORIA CALCULO TORN MEC 1edDokumen161 halamanTEORIA CALCULO TORN MEC 1edKosmos (Kosmosalfa)Belum ada peringkat
- Practica 7 Mecanica de FluidosDokumen5 halamanPractica 7 Mecanica de FluidosSergio GarzaBelum ada peringkat
- MT Catalogo Industrial 2017Dokumen128 halamanMT Catalogo Industrial 2017Pablo CastroBelum ada peringkat
- Informe Lab 6Dokumen7 halamanInforme Lab 6Luis PoloBelum ada peringkat
- Caja Scania Grso905Dokumen48 halamanCaja Scania Grso905Cristian Garcia80% (5)
- Actividad Primer 50%Dokumen2 halamanActividad Primer 50%Diana Liseth SolerBelum ada peringkat
- Amortiguación Controlada Continuamente CCDDokumen2 halamanAmortiguación Controlada Continuamente CCDIng. Julián SolísBelum ada peringkat
- NOMBRE. - José David APELLIDO. - Marín CARRERA. - Mecánica Automotriz MATERIA. - Informática Aplicada INF 250 AUTOMOTRIZ Fotografia.Dokumen63 halamanNOMBRE. - José David APELLIDO. - Marín CARRERA. - Mecánica Automotriz MATERIA. - Informática Aplicada INF 250 AUTOMOTRIZ Fotografia.Rolando LopezBelum ada peringkat
- Laboratorio 2 Quentasi Serrudo MarcoDokumen5 halamanLaboratorio 2 Quentasi Serrudo MarcoMarco Joel Quentasi SerrudoBelum ada peringkat
- 02 Esfuerzo Normal 1 PDFDokumen19 halaman02 Esfuerzo Normal 1 PDFSiixttoAlkaëdaInpBelum ada peringkat
- Practica #1 Termo Ley de BoyleDokumen5 halamanPractica #1 Termo Ley de BoyleSald9398Belum ada peringkat
- Primera Evaluación - Revisión Del IntentoDokumen17 halamanPrimera Evaluación - Revisión Del Intentovanessa ortizBelum ada peringkat