Anda mungkin juga menyukai
- Identification and MitigationDokumen16 halamanIdentification and Mitigation103 Syed Ismail SBelum ada peringkat
- Chapter 11 BalancingDokumen102 halamanChapter 11 Balancingewfsd100% (1)
- Balancing TolerancesDokumen7 halamanBalancing TolerancesAnonymous 7aN0oYUm7v100% (2)
- Principles of Balancing and of Balancing Machines: N. F. Rieger (Ed.), Rotordynamics 2 © Springer-Verlag Wien 1988Dokumen2 halamanPrinciples of Balancing and of Balancing Machines: N. F. Rieger (Ed.), Rotordynamics 2 © Springer-Verlag Wien 1988YASSERBelum ada peringkat
- Presentation On VibrationDokumen24 halamanPresentation On VibrationSethuRamalingamBelum ada peringkat
- Balancing of Rotating Equipment ComponentsDokumen31 halamanBalancing of Rotating Equipment ComponentsJOSEACOSTABelum ada peringkat
- Basics of Turbomachinery BalanceDokumen14 halamanBasics of Turbomachinery BalanceSuthan RBelum ada peringkat
- Rotor Balancing Simulator: Fourth Year Graduation ProjectDokumen38 halamanRotor Balancing Simulator: Fourth Year Graduation ProjectMahmoud SamirBelum ada peringkat
- Part 5 of 5Dokumen7 halamanPart 5 of 5mick.pride81Belum ada peringkat
- New Moment WeightDokumen16 halamanNew Moment WeightRaj KiranBelum ada peringkat
- Engineering Encyclopedia: Balancing of Rigid and Flexible RotorsDokumen10 halamanEngineering Encyclopedia: Balancing of Rigid and Flexible RotorsAfzaalUmair100% (1)
- The Steam Turbine: 7.3.3 Rotor BalancingDokumen2 halamanThe Steam Turbine: 7.3.3 Rotor BalancingBhavana KewlaniBelum ada peringkat
- Goal of ProjectDokumen19 halamanGoal of ProjectMahmoud SamirBelum ada peringkat
- Balancing of RotorsDokumen20 halamanBalancing of RotorsChetan Mistry100% (1)
- IRD Balancing of RotorsDokumen10 halamanIRD Balancing of RotorsPrashant PuriBelum ada peringkat
- IRD Balancing of RotorsDokumen10 halamanIRD Balancing of RotorsPrashant PuriBelum ada peringkat
- PreLoad in BearingsDokumen7 halamanPreLoad in BearingsRaghavendra NagarajBelum ada peringkat
- JB T8446Dokumen7 halamanJB T8446Julio B. HildebrandBelum ada peringkat
- FPS Wind Turbine Rotor Balance Article PublishCDokumen12 halamanFPS Wind Turbine Rotor Balance Article PublishCmlenzBelum ada peringkat
- Rotor Balancing: 28.1 General ConsiderationsDokumen2 halamanRotor Balancing: 28.1 General ConsiderationsYASSERBelum ada peringkat
- Fig.3.2 Using Shaft Stick: Copy Right of Gvibration Busters Pvt. LTDDokumen5 halamanFig.3.2 Using Shaft Stick: Copy Right of Gvibration Busters Pvt. LTDEzhil Vendhan PalanisamyBelum ada peringkat
- Precautions and Safeguards During In-Situ BalancingDokumen13 halamanPrecautions and Safeguards During In-Situ BalancingAbdul KurniadiBelum ada peringkat
- TurbineDokumen8 halamanTurbineJay Patel100% (1)
- HOP Alancing Olerances: Ractical UideDokumen7 halamanHOP Alancing Olerances: Ractical UideAlex CarmonaBelum ada peringkat
- TBSBal UserGuide Version1Dokumen9 halamanTBSBal UserGuide Version1vjBelum ada peringkat
- Flow Excited Vibration in High-Pressure Turbines (Steam Whirl)Dokumen10 halamanFlow Excited Vibration in High-Pressure Turbines (Steam Whirl)권용수100% (2)
- Damping in A Rolling Bearing Arrangement-SkfDokumen7 halamanDamping in A Rolling Bearing Arrangement-Skfmick.pride81Belum ada peringkat
- TDBFP Gear-Coupling Misalignment & Diagnosis-A Case StudyDokumen19 halamanTDBFP Gear-Coupling Misalignment & Diagnosis-A Case StudybederinadmlBelum ada peringkat
- VG Power Turbo Rotor BalancingDokumen6 halamanVG Power Turbo Rotor BalancingmersiumBelum ada peringkat
- Diagnosing Rotor Bar Issues With Torque and Current Signature AnalysisDokumen11 halamanDiagnosing Rotor Bar Issues With Torque and Current Signature AnalysisJose Alejandro Mansutti G100% (1)
- Design and Development of Dynamic Balancing MachineDokumen9 halamanDesign and Development of Dynamic Balancing MachineSibasish SahuBelum ada peringkat
- Fans. Balance, Vibration, and Vibration AnalysisDokumen4 halamanFans. Balance, Vibration, and Vibration AnalysisTxomin RodríguezBelum ada peringkat
- Vibration Is Not The Only Method For Balancing: Byron MartinDokumen3 halamanVibration Is Not The Only Method For Balancing: Byron MartinAgustin A.Belum ada peringkat
- In Situ Dynamic Balancing ServicesDokumen2 halamanIn Situ Dynamic Balancing ServicesRamesh Babu VBelum ada peringkat
- Wind Turbine Rotor Balance Static V Dynamic Rev4 ExtDokumen14 halamanWind Turbine Rotor Balance Static V Dynamic Rev4 ExtmlenzBelum ada peringkat
- 2013-Eling - Dyn of Rotors On Hydrodynamic Bearings-COMSOL ConfDokumen7 halaman2013-Eling - Dyn of Rotors On Hydrodynamic Bearings-COMSOL ConfAlex CooperBelum ada peringkat
- Static and Dynamic Balancing of Rigid RotorsDokumen20 halamanStatic and Dynamic Balancing of Rigid RotorsTeng Soon Chye100% (1)
- New Moment Weight PDFDokumen17 halamanNew Moment Weight PDFAchmad Arifudin HidayatullohBelum ada peringkat
- Flexible Rotor Balancing - HalfenDokumen7 halamanFlexible Rotor Balancing - HalfenSatyabrata SahooBelum ada peringkat
- Rotordynamics and Balancing RevisitedDokumen40 halamanRotordynamics and Balancing RevisitedMohd Khairi Asyraf Ab HamidBelum ada peringkat
- Balancing of Rotating MachineryDokumen38 halamanBalancing of Rotating MachineryThomas AbrahamBelum ada peringkat
- Mi 200224Dokumen8 halamanMi 200224Văn Tuấn NguyễnBelum ada peringkat
- Torque Sensor Technical Overview ArticleDokumen8 halamanTorque Sensor Technical Overview ArticledavlascBelum ada peringkat
- 2009-Schweizer-Oil Whirl, Whip Occ in Rot Systs With Full Floating Ring BearingsDokumen24 halaman2009-Schweizer-Oil Whirl, Whip Occ in Rot Systs With Full Floating Ring BearingsAlex CooperBelum ada peringkat
- Gear VibrationsDokumen11 halamanGear Vibrationshumayun121Belum ada peringkat
- 010 - BalancingDokumen21 halaman010 - BalancingMuhammad FawadBelum ada peringkat
- Article Balancing of Rotor Blades PDFDokumen5 halamanArticle Balancing of Rotor Blades PDFClaudio SalicioBelum ada peringkat
- Reducing Vibration by Balancing Rotor Blades: ReprintDokumen5 halamanReducing Vibration by Balancing Rotor Blades: Reprintmipaoll70Belum ada peringkat
- Rotor PDFDokumen1 halamanRotor PDFPavan KishoreBelum ada peringkat
- Global Standards Policy & Procedure: Revision HistoryDokumen6 halamanGlobal Standards Policy & Procedure: Revision HistoryHendriantoBelum ada peringkat
- Dynamic BalancingDokumen8 halamanDynamic Balancingamitammy19Belum ada peringkat
- Turbopower™ Turbodrills: January 2017Dokumen20 halamanTurbopower™ Turbodrills: January 2017Reynaldo Navia Mendoza100% (1)
- Condition Monitoring Ensures Against Mechanical Failure 020912Dokumen8 halamanCondition Monitoring Ensures Against Mechanical Failure 020912satya krishna chagantiBelum ada peringkat
- Bearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsDari EverandBearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsPenilaian: 4 dari 5 bintang4/5 (1)
- Process System Value and Exergoeconomic Performance of Captive Power PlantsDari EverandProcess System Value and Exergoeconomic Performance of Captive Power PlantsBelum ada peringkat
- Power House 1Dokumen1 halamanPower House 1ecsuperalBelum ada peringkat
- Power HouseDokumen1 halamanPower HouseecsuperalBelum ada peringkat
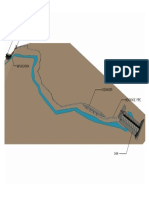
- Hydro Sample Site PlanDokumen1 halamanHydro Sample Site PlanecsuperalBelum ada peringkat
- Ambient Noise Level Std.Dokumen1 halamanAmbient Noise Level Std.ecsuperalBelum ada peringkat
- Dam & DesanderDokumen1 halamanDam & DesanderecsuperalBelum ada peringkat
- Alstom HP 1103 PerformanceDokumen2 halamanAlstom HP 1103 PerformanceecsuperalBelum ada peringkat
- Copper Water and Gas Tube According ASTM B 88 - Imperial UnitsDokumen3 halamanCopper Water and Gas Tube According ASTM B 88 - Imperial UnitsecsuperalBelum ada peringkat
- BS4504 PN 16 Flange DimensionsDokumen3 halamanBS4504 PN 16 Flange DimensionsecsuperalBelum ada peringkat
- Electrical Test Sheet: Ele/Tss/At 300 X Commissioning E 4Dokumen18 halamanElectrical Test Sheet: Ele/Tss/At 300 X Commissioning E 4ecsuperalBelum ada peringkat
- Electrical Test Sheet: Standard For Combined Cycle Power PlantDokumen26 halamanElectrical Test Sheet: Standard For Combined Cycle Power PlantecsuperalBelum ada peringkat
- Central Philippine University College of Engineering SECOND SEMESTER S.Y. 2005-2006 Work Term ReportDokumen17 halamanCentral Philippine University College of Engineering SECOND SEMESTER S.Y. 2005-2006 Work Term ReportecsuperalBelum ada peringkat
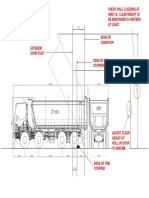
- Dump Truck IllustrationDokumen1 halamanDump Truck IllustrationecsuperalBelum ada peringkat
- Request For Welding Procedure ApprovalDokumen13 halamanRequest For Welding Procedure ApprovalecsuperalBelum ada peringkat
- Request For Welding Procedure ApprovalDokumen18 halamanRequest For Welding Procedure Approvalecsuperal100% (1)
- Re BuyerDokumen20 halamanRe BuyerElias OjuokBelum ada peringkat
- Some Solutions To Enderton LogicDokumen16 halamanSome Solutions To Enderton LogicJason100% (1)
- 1207 - RTC-8065 II InglesDokumen224 halaman1207 - RTC-8065 II InglesGUILHERME SANTOSBelum ada peringkat
- Real Options BV Lec 14Dokumen49 halamanReal Options BV Lec 14Anuranjan TirkeyBelum ada peringkat
- Day 2 - Evident's Official ComplaintDokumen18 halamanDay 2 - Evident's Official ComplaintChronicle Herald100% (1)
- Successful School LeadershipDokumen132 halamanSuccessful School LeadershipDabney90100% (2)
- Citing Correctly and Avoiding Plagiarism: MLA Format, 7th EditionDokumen4 halamanCiting Correctly and Avoiding Plagiarism: MLA Format, 7th EditionDanish muinBelum ada peringkat
- Indian Pharmaceutical IndustryDokumen25 halamanIndian Pharmaceutical IndustryVijaya enterprisesBelum ada peringkat
- Trainer Manual Internal Quality AuditDokumen32 halamanTrainer Manual Internal Quality AuditMuhammad Erwin Yamashita100% (5)
- Office Administration: School-Based AssessmentDokumen17 halamanOffice Administration: School-Based AssessmentFelix LawrenceBelum ada peringkat
- Program Need Analysis Questionnaire For DKA ProgramDokumen6 halamanProgram Need Analysis Questionnaire For DKA ProgramAzman Bin TalibBelum ada peringkat
- Arte PoveraDokumen13 halamanArte PoveraSohini MaitiBelum ada peringkat
- SUNGLAO - TM PortfolioDokumen60 halamanSUNGLAO - TM PortfolioGIZELLE SUNGLAOBelum ada peringkat
- Registration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaDokumen3 halamanRegistration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaAna IrinaBelum ada peringkat
- RTD IncotestDokumen2 halamanRTD IncotestJabari KaneBelum ada peringkat
- Feb-May SBI StatementDokumen2 halamanFeb-May SBI StatementAshutosh PandeyBelum ada peringkat
- KV4BBSR Notice ContractuaL Interview 2023-24Dokumen9 halamanKV4BBSR Notice ContractuaL Interview 2023-24SuchitaBelum ada peringkat
- Remediation of AlphabetsDokumen34 halamanRemediation of AlphabetsAbdurahmanBelum ada peringkat
- The Making of A Scientist Class 10Dokumen2 halamanThe Making of A Scientist Class 10abhigna.ravikumarBelum ada peringkat
- Defenders of The Empire v1.4Dokumen13 halamanDefenders of The Empire v1.4Iker Antolín MedinaBelum ada peringkat
- NST 029Dokumen123 halamanNST 029Riaz Ahmad BhattiBelum ada peringkat
- Cet Admissions 2018 FinalDokumen225 halamanCet Admissions 2018 FinalkiranBelum ada peringkat
- The Algorithm Development and Implementation For 3D Printers Based On Adaptive PID ControllerDokumen8 halamanThe Algorithm Development and Implementation For 3D Printers Based On Adaptive PID ControllerShahrzad GhasemiBelum ada peringkat
- List of Institutions With Ladderized Program Under Eo 358 JULY 2006 - DECEMBER 31, 2007Dokumen216 halamanList of Institutions With Ladderized Program Under Eo 358 JULY 2006 - DECEMBER 31, 2007Jen CalaquiBelum ada peringkat
- Regression Week 2: Multiple Linear Regression Assignment 1: If You Are Using Graphlab CreateDokumen1 halamanRegression Week 2: Multiple Linear Regression Assignment 1: If You Are Using Graphlab CreateSamBelum ada peringkat
- English 2 Q3 Week 7 DLLDokumen7 halamanEnglish 2 Q3 Week 7 DLLEste R A BulaonBelum ada peringkat
- Datasheet 6A8 FusívelDokumen3 halamanDatasheet 6A8 FusívelMluz LuzBelum ada peringkat
- BGP PDFDokumen100 halamanBGP PDFJeya ChandranBelum ada peringkat
- 10 - SHM, Springs, DampingDokumen4 halaman10 - SHM, Springs, DampingBradley NartowtBelum ada peringkat
- PDFDokumen1 halamanPDFJaime Arroyo0% (1)