Anda mungkin juga menyukai
- Group MembersDokumen15 halamanGroup Membersprabhaspodem06Belum ada peringkat
- Arduino Uno and LCD DISPLAYDokumen21 halamanArduino Uno and LCD DISPLAYMadanKumar100% (1)
- Lab 2 - Uso de Display 7 Segmentos en Arduino. Entradas AnalogicasDokumen27 halamanLab 2 - Uso de Display 7 Segmentos en Arduino. Entradas Analogicasroger david pimienta barrosBelum ada peringkat
- Esd PracticalDokumen37 halamanEsd PracticalPurva SukhwalBelum ada peringkat
- I2c 2004 LCDDokumen26 halamanI2c 2004 LCDizaqui bernardoBelum ada peringkat
- Gy 271 Electronic CompassDokumen7 halamanGy 271 Electronic CompassAditia KurniawanBelum ada peringkat
- Name: Aditya Branch: Ee ROLL NO.: 2004201Dokumen11 halamanName: Aditya Branch: Ee ROLL NO.: 2004201Aditya SinghaniaBelum ada peringkat
- Nokia 5110 Arduino SketchDokumen1 halamanNokia 5110 Arduino SketchDado GaudiBelum ada peringkat
- EDE702 Serial LCD Interface ICDokumen9 halamanEDE702 Serial LCD Interface ICJosé ManuelBelum ada peringkat
- HCode ArduinoDokumen4 halamanHCode ArduinoCompu SolucionesBelum ada peringkat
- BCD To 7 Segment Display ProjectnewDokumen5 halamanBCD To 7 Segment Display ProjectnewSaeed Ali ShahaniBelum ada peringkat
- Lab 4 - Lcds and AccelerometersDokumen8 halamanLab 4 - Lcds and AccelerometersAlmahdiSalehBelum ada peringkat
- Lab 13Dokumen11 halamanLab 13ubaidBelum ada peringkat
- 3 CH Sensor Suhu DS1820 LM35 TCDokumen7 halaman3 CH Sensor Suhu DS1820 LM35 TCGosong FikruBelum ada peringkat
- Chapter 7,8,9,10Dokumen16 halamanChapter 7,8,9,10Amruta AvhaleBelum ada peringkat
- Experiment No 3 AdcDokumen8 halamanExperiment No 3 AdcDakshata WaghBelum ada peringkat
- ATMega16 Microcontroller Digital LM35 LCD ThermometerDokumen4 halamanATMega16 Microcontroller Digital LM35 LCD ThermometerAdrianMartinezMendez100% (3)
- Elec 562Dokumen6 halamanElec 562MOHAMMEDBelum ada peringkat
- Iot - 7Dokumen4 halamanIot - 7vedtanwar001Belum ada peringkat
- Ks0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleDokumen13 halamanKs0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleBarmaley67Belum ada peringkat
- I2c 1602 LCDDokumen8 halamanI2c 1602 LCDnarwres barhoumiBelum ada peringkat
- Arduino Interrupts Speed Up Your Arduino To Be Responsive To Events PDFDokumen73 halamanArduino Interrupts Speed Up Your Arduino To Be Responsive To Events PDFpermasa100% (1)
- mlx90614 LCD Celsius InoDokumen1 halamanmlx90614 LCD Celsius Inoعادل هيكلBelum ada peringkat
- Arduino Adxl335 Accelerometer Interfacing With Arduino UnoDokumen4 halamanArduino Adxl335 Accelerometer Interfacing With Arduino UnoedeBelum ada peringkat
- UTFTDokumen8 halamanUTFTJose Ramon Juan EscribanoBelum ada peringkat
- Arduino Character LCD TutorialDokumen3 halamanArduino Character LCD TutorialKarlitosman100% (1)
- GLCDDokumen33 halamanGLCDDedi SupardiBelum ada peringkat
- Project JaurnalDokumen8 halamanProject JaurnalAbu SalmanBelum ada peringkat
- Handson Technology: I2C To LCD Interface BoardDokumen6 halamanHandson Technology: I2C To LCD Interface BoardAlan Robson100% (1)
- Pid ArduinoDokumen6 halamanPid ArduinoJohn MurrayBelum ada peringkat
- Ad 622 DiscriptionDokumen20 halamanAd 622 DiscriptionZenache AhlemBelum ada peringkat
- ES Experiment No. 05 B-10Dokumen5 halamanES Experiment No. 05 B-10Shubham PatilBelum ada peringkat
- System Controllers: A Navya Vishnu 1210410304Dokumen33 halamanSystem Controllers: A Navya Vishnu 1210410304Ananda KrishnaBelum ada peringkat
- DmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentDokumen6 halamanDmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentJoshikaBelum ada peringkat
- Interfacing LCD To Arduino. JHD162ADokumen10 halamanInterfacing LCD To Arduino. JHD162AJonathan Castro100% (1)
- Interfacing Nokia ScreenDokumen4 halamanInterfacing Nokia ScreenDavid Sanderson100% (2)
- Real Time Digital Clock ReportDokumen14 halamanReal Time Digital Clock ReportNoor AhmedBelum ada peringkat
- Soalan PRA MySkills 2013 - Release PublisDokumen11 halamanSoalan PRA MySkills 2013 - Release Publisnabilo20Belum ada peringkat
- Digital Dice Using At89C51: A Report Submitt Ed To MSRIT Bangalore, For Partial Requirement of Award of Degree ofDokumen21 halamanDigital Dice Using At89C51: A Report Submitt Ed To MSRIT Bangalore, For Partial Requirement of Award of Degree ofHimica KhuranaBelum ada peringkat
- Digital Calulator Using 89C52 Micro ControllerDokumen8 halamanDigital Calulator Using 89C52 Micro Controllerchachunasayan75% (4)
- Avg AdcDokumen5 halamanAvg AdcShreeharsha KolthayaBelum ada peringkat
- Project ReportDokumen49 halamanProject ReportPrateek SrivastavaBelum ada peringkat
- USB ThermometerDokumen40 halamanUSB ThermometerTheodøros D' SpectrøømBelum ada peringkat
- Kit InstructionsDokumen9 halamanKit Instructionswoodywald721999Belum ada peringkat
- CPEN 100 Laboratory No. 5Dokumen12 halamanCPEN 100 Laboratory No. 5Vallery Dela CruzBelum ada peringkat
- University Automoma of Queretaro Engineering Faculty: Digital System 2Dokumen15 halamanUniversity Automoma of Queretaro Engineering Faculty: Digital System 2Carlos Eduardo Martínez Hernández100% (1)
- Project Design StrategyDokumen8 halamanProject Design StrategyElias HailuBelum ada peringkat
- ArduinoLevelIndicator v1Dokumen4 halamanArduinoLevelIndicator v1Arun Gupta0% (1)
- ICM7211Dokumen13 halamanICM7211Volkan YılmazBelum ada peringkat
- A Simple Digital Thermometer: ContentDokumen13 halamanA Simple Digital Thermometer: ContentKumar SamvatBelum ada peringkat
- Arduino Lab2Dokumen89 halamanArduino Lab2sarvodayasingh100% (1)
- I. Our Technical Solution:: A) Client - Customer SystemDokumen8 halamanI. Our Technical Solution:: A) Client - Customer SystemAyoubDrissiBelum ada peringkat
- PID Control (OLED Display - HDMI Output)Dokumen20 halamanPID Control (OLED Display - HDMI Output)sampathreddy130623Belum ada peringkat
- This Instructable Will Show You How To Make A Portable Digital Optical Tachometer Using An Arduino UnoDokumen18 halamanThis Instructable Will Show You How To Make A Portable Digital Optical Tachometer Using An Arduino UnoJamMnx_Belum ada peringkat
- Arduino Thermometer With 7-Segment LEDDokumen26 halamanArduino Thermometer With 7-Segment LEDRohit AdnaikBelum ada peringkat
- Projects With Microcontrollers And PICCDari EverandProjects With Microcontrollers And PICCPenilaian: 5 dari 5 bintang5/5 (1)
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemDari EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemBelum ada peringkat
- Exploring Arduino: Tools and Techniques for Engineering WizardryDari EverandExploring Arduino: Tools and Techniques for Engineering WizardryPenilaian: 4.5 dari 5 bintang4.5/5 (5)
- Practical Design of Digital Circuits: Basic Logic to MicroprocessorsDari EverandPractical Design of Digital Circuits: Basic Logic to MicroprocessorsPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- TV Rptrs RPTR 118Dokumen10 halamanTV Rptrs RPTR 118Benjamin DoverBelum ada peringkat
- TV Rptrs RPTR 122Dokumen10 halamanTV Rptrs RPTR 122Benjamin DoverBelum ada peringkat
- Battleship IOWA EventDokumen1 halamanBattleship IOWA EventBenjamin DoverBelum ada peringkat
- Merci Train Box CarsDokumen2 halamanMerci Train Box CarsBenjamin DoverBelum ada peringkat
- Bogen Amplifier - Gs-SeriesDokumen20 halamanBogen Amplifier - Gs-SeriesBenjamin DoverBelum ada peringkat
- TV Rptrs RPTR 135Dokumen11 halamanTV Rptrs RPTR 135Benjamin DoverBelum ada peringkat
- TV Rptrs RPTR 120revDokumen12 halamanTV Rptrs RPTR 120revBenjamin DoverBelum ada peringkat
- Nature Power 110 Watt Solar Panel KitDokumen10 halamanNature Power 110 Watt Solar Panel KitBenjamin DoverBelum ada peringkat
- Radio Shack Pro-2040Dokumen44 halamanRadio Shack Pro-2040Benjamin DoverBelum ada peringkat
- TV Rptrs RPTR 121 1Dokumen12 halamanTV Rptrs RPTR 121 1Benjamin DoverBelum ada peringkat
- ZyXEL - NAS326 - 6Dokumen6 halamanZyXEL - NAS326 - 6Benjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-109Dokumen9 halamanBoulder Amateur TV Repeater's Newsletter-109Benjamin DoverBelum ada peringkat
- Rca Remote Rcr412s - OmDokumen21 halamanRca Remote Rcr412s - OmBenjamin DoverBelum ada peringkat
- Camera Lens Sizes, Mounts & AdaptersDokumen11 halamanCamera Lens Sizes, Mounts & AdaptersBenjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-112Dokumen13 halamanBoulder Amateur TV Repeater's Newsletter-112Benjamin DoverBelum ada peringkat
- ZyXEL - NAS326 - V5.21 - Ed4Dokumen341 halamanZyXEL - NAS326 - V5.21 - Ed4Benjamin DoverBelum ada peringkat
- HR9670 Amateur Radio Emergency Preparedness ActDokumen14 halamanHR9670 Amateur Radio Emergency Preparedness ActBenjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-111revDokumen9 halamanBoulder Amateur TV Repeater's Newsletter-111revBenjamin DoverBelum ada peringkat
- Hoshizaki IM-500SAA Icemaker Service ManualDokumen39 halamanHoshizaki IM-500SAA Icemaker Service ManualBenjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-107Dokumen11 halamanBoulder Amateur TV Repeater's Newsletter-107Benjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-108Dokumen9 halamanBoulder Amateur TV Repeater's Newsletter-108Benjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-110Dokumen11 halamanBoulder Amateur TV Repeater's Newsletter-110Benjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-105Dokumen10 halamanBoulder Amateur TV Repeater's Newsletter-105Benjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-106-2Dokumen13 halamanBoulder Amateur TV Repeater's Newsletter-106-2Benjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-101Dokumen12 halamanBoulder Amateur TV Repeater's Newsletter-101Benjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-104Dokumen14 halamanBoulder Amateur TV Repeater's Newsletter-104Benjamin DoverBelum ada peringkat
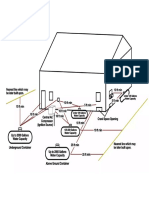
- Propane Tank Location GuideDokumen1 halamanPropane Tank Location GuideBenjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-98Dokumen11 halamanBoulder Amateur TV Repeater's Newsletter-98Benjamin DoverBelum ada peringkat
- TV Rptrs RPTR 113Dokumen11 halamanTV Rptrs RPTR 113Benjamin DoverBelum ada peringkat
- Boulder Amateur TV Repeater's Newsletter-99Dokumen11 halamanBoulder Amateur TV Repeater's Newsletter-99Benjamin DoverBelum ada peringkat
- Las-Shs Gen - Chem Melc 1 q2 Week-1Dokumen11 halamanLas-Shs Gen - Chem Melc 1 q2 Week-1Carl Baytola RatesBelum ada peringkat
- 2 Mathematics For Social Science-1-1Dokumen58 halaman2 Mathematics For Social Science-1-1ሀበሻ EntertainmentBelum ada peringkat
- English Project Basic Listo (Realizado)Dokumen3 halamanEnglish Project Basic Listo (Realizado)Javier ToapantaBelum ada peringkat
- Lecture Notes 10: Fading Channels ModelsDokumen19 halamanLecture Notes 10: Fading Channels ModelsayushBelum ada peringkat
- 31 The Emergence of Social GerontologyDokumen9 halaman31 The Emergence of Social GerontologygiacomobarnigeoBelum ada peringkat
- Respons 910 Analyzer: Operator's ManualDokumen246 halamanRespons 910 Analyzer: Operator's ManualUmashankar LoganathanBelum ada peringkat
- Tutorial Probability and Statistics: SolutionsDokumen3 halamanTutorial Probability and Statistics: SolutionsAdnanBelum ada peringkat
- Nursery Car Seat Supplement 2023Dokumen40 halamanNursery Car Seat Supplement 2023doniBelum ada peringkat
- 01 Agile Challenge-Does Anyone Have A PencilDokumen13 halaman01 Agile Challenge-Does Anyone Have A PencilAbhisek MukherjeeBelum ada peringkat
- Section A - Listening (15 PTS) I. Listen To The Dialogue and Fill in Each Blank With ONE Suitable Word or Number. The House For RentDokumen22 halamanSection A - Listening (15 PTS) I. Listen To The Dialogue and Fill in Each Blank With ONE Suitable Word or Number. The House For RentThanh PhongBelum ada peringkat
- Removal Processes and Machine Tools: Indian Institute of Technology DelhiDokumen28 halamanRemoval Processes and Machine Tools: Indian Institute of Technology DelhiEthan HuntBelum ada peringkat
- Ruskin As A Social Reformer - Docx ADokumen2 halamanRuskin As A Social Reformer - Docx AAtif Hayat50% (2)
- BD Bactec Mgit 960 Mycobacteria Culture SystemDokumen6 halamanBD Bactec Mgit 960 Mycobacteria Culture SystemHuguens DesrosiersBelum ada peringkat
- VRV Heat Recovery REYQ-XDokumen20 halamanVRV Heat Recovery REYQ-XFrancisco LinaresBelum ada peringkat
- Self-Diagnosis With Advanced Hospital Management-IJRASETDokumen5 halamanSelf-Diagnosis With Advanced Hospital Management-IJRASETIJRASETPublicationsBelum ada peringkat
- RWB 60-856 Inst - Op. Mantto.Dokumen52 halamanRWB 60-856 Inst - Op. Mantto.Daniel Dennis Escobar Subirana100% (1)
- 843-Artificial Intelligence-Xi XiiDokumen11 halaman843-Artificial Intelligence-Xi XiiPɾαƙԋყαƚ PαɳԃҽყBelum ada peringkat
- Excel Tips Tricks e-BookV1.1 PDFDokumen20 halamanExcel Tips Tricks e-BookV1.1 PDFSulabhBelum ada peringkat
- Engineering Note NTC and PTC Thermistors: Vishay DaleDokumen3 halamanEngineering Note NTC and PTC Thermistors: Vishay DaleDiabloBelum ada peringkat
- Cold-Formed Steel Portal Frame Moment-Resisting Joints Behaviour Capacity and DesignDokumen13 halamanCold-Formed Steel Portal Frame Moment-Resisting Joints Behaviour Capacity and DesignAhmed MoniemBelum ada peringkat
- Building Construction Costs Handbook 2019-2020Dokumen89 halamanBuilding Construction Costs Handbook 2019-2020Rotich philipBelum ada peringkat
- Deck Manual PDFDokumen217 halamanDeck Manual PDFBozidar TomasevicBelum ada peringkat
- Principal's Corner: School ProfileDokumen7 halamanPrincipal's Corner: School ProfileAngel Mae LabadorBelum ada peringkat
- AI Coming For LawyersDokumen4 halamanAI Coming For LawyersbashiBelum ada peringkat
- Chapter Two: Describing DataDokumen20 halamanChapter Two: Describing DataJames Alex HabaradasBelum ada peringkat
- Course Syllabus Template For BSED 1Dokumen2 halamanCourse Syllabus Template For BSED 1Rosalyn MauricioBelum ada peringkat
- Real-World Data Is Dirty: Data Cleansing and The Merge/Purge ProblemDokumen29 halamanReal-World Data Is Dirty: Data Cleansing and The Merge/Purge Problemapi-19731161Belum ada peringkat
- Summative Test 3.1 Math 10Dokumen2 halamanSummative Test 3.1 Math 10Christian DecenaBelum ada peringkat
- Transco Summary Gudinace For Work Method Statements R 0 300912Dokumen12 halamanTransco Summary Gudinace For Work Method Statements R 0 300912kla_alk100% (2)
- HYSYS Basis PDFDokumen306 halamanHYSYS Basis PDFsalman hussainBelum ada peringkat