Anda mungkin juga menyukai
- Equipos o Instrumentos Utilizados Industria AlimentariaDokumen12 halamanEquipos o Instrumentos Utilizados Industria AlimentariaDavid Alejandro Diaz100% (1)
- Sensores de PosicionDokumen21 halamanSensores de PosicionNaara ViverosBelum ada peringkat
- Equipos o Instrumentos Utilizados Industria AlimentariaDokumen12 halamanEquipos o Instrumentos Utilizados Industria AlimentariaDavid Alejandro Diaz100% (1)
- SDG Tema 04Dokumen32 halamanSDG Tema 04Alfredo hernandezBelum ada peringkat
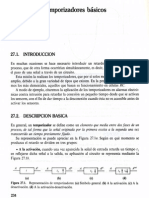
- Temporizadores Bc3a1sicosDokumen5 halamanTemporizadores Bc3a1sicospeyuco3333Belum ada peringkat
- Estaciones CiclismoDokumen1 halamanEstaciones CiclismoAlfredo hernandezBelum ada peringkat
- Libro Instalaciones Elctricas IDokumen296 halamanLibro Instalaciones Elctricas IVictor Hugo Alvarez RicoBelum ada peringkat
- El PosicionamientoDokumen20 halamanEl PosicionamientoFlorentino TiconaBelum ada peringkat
- Acometidas Electricas e Instalaciones de Medidores en Baja TensionDokumen28 halamanAcometidas Electricas e Instalaciones de Medidores en Baja TensionjrsnovemberBelum ada peringkat
- Bombas CentrifugasDokumen32 halamanBombas CentrifugasAlfredo hernandezBelum ada peringkat
- Controlabilidad y ObservabilidadDokumen15 halamanControlabilidad y ObservabilidadAndrés Jiménez100% (1)
- E.T. Subestaciones CompactasDokumen8 halamanE.T. Subestaciones CompactasAlfredo hernandezBelum ada peringkat
- Introducción A La Experimentación Animal (Portada)Dokumen1 halamanIntroducción A La Experimentación Animal (Portada)RicardoMelchorBelum ada peringkat
- Centrales ElectricasDokumen10 halamanCentrales ElectricasJosh MarquezBelum ada peringkat
- Máquinas Eléctricas-3ra Edicion-Stephen ChapmanDokumen776 halamanMáquinas Eléctricas-3ra Edicion-Stephen ChapmanmarioBelum ada peringkat
- Verbos - para ObjetivosDokumen2 halamanVerbos - para ObjetivosAlfredo hernandezBelum ada peringkat
- Ensayo Ali Yahir Unidad 1Dokumen5 halamanEnsayo Ali Yahir Unidad 1Alfredo hernandezBelum ada peringkat
- Fallas en Sistemas ElectricasDokumen3 halamanFallas en Sistemas ElectricasAlfredo hernandezBelum ada peringkat
- Tipos de RelevadoresDokumen11 halamanTipos de RelevadoresAlfredo hernandezBelum ada peringkat
- 2.3 Simbologia y Abreviaciones Utilizadas para La Designacion y Numeracion de DispositivosDokumen6 halaman2.3 Simbologia y Abreviaciones Utilizadas para La Designacion y Numeracion de DispositivosIsaac Sanchez100% (1)
- Guía de Uso PID para ArduinoDokumen28 halamanGuía de Uso PID para ArduinoWashington Quevedo100% (1)
- Control de Posicion de Un Balancin Con ADokumen6 halamanControl de Posicion de Un Balancin Con AAlfredo hernandezBelum ada peringkat
- Manual Programacion ArduinoDokumen70 halamanManual Programacion Arduinofaasa83% (6)
- Control PidDokumen6 halamanControl PidR Rdez DaveBelum ada peringkat
- Estructura Trabajo INFORMEDokumen20 halamanEstructura Trabajo INFORMEGiovanni ChávezBelum ada peringkat
- Máquinas Eléctricas-3ra Edicion-Stephen ChapmanDokumen776 halamanMáquinas Eléctricas-3ra Edicion-Stephen ChapmanmarioBelum ada peringkat
- Guia 26 El Almacenamiento de La ElectricidadDokumen305 halamanGuia 26 El Almacenamiento de La ElectricidadAlfredo hernandezBelum ada peringkat
- Estructura de TesisDokumen29 halamanEstructura de TesisAlfredo hernandezBelum ada peringkat
- Manual Programacion ArduinoDokumen70 halamanManual Programacion Arduinofaasa83% (6)
- Reglamento para La Elaboracion y Defensa de Tesis y de TesinasDokumen8 halamanReglamento para La Elaboracion y Defensa de Tesis y de TesinasCarpinteria Metalurgica Achucarro SneadBelum ada peringkat
- Caso Lehigh Steel - Grupo - Cadena de SuministroDokumen3 halamanCaso Lehigh Steel - Grupo - Cadena de SuministroGERALDINE GIANELLY CASTILLO SANCHEZBelum ada peringkat
- Eduardo KingmanDokumen4 halamanEduardo KingmanDAVIS CALLEBelum ada peringkat
- Audiencia de Legalizacion de CapturaDokumen6 halamanAudiencia de Legalizacion de CapturaOmairo Joseph Escobar SalazarBelum ada peringkat
- F0 Angulos VerticalesDokumen1 halamanF0 Angulos VerticalesDiego SeminarioBelum ada peringkat
- Cuadro Comparativo Tipos de LiteraturaDokumen2 halamanCuadro Comparativo Tipos de LiteraturaEstefanyBelum ada peringkat
- Aves Endémicas de MéxicoDokumen3 halamanAves Endémicas de MéxicoSandy CárdenasBelum ada peringkat
- Cotización 2019 - Delphin Express BIM 360 v106Dokumen2 halamanCotización 2019 - Delphin Express BIM 360 v106LG Bim RevitBelum ada peringkat
- Amnios y Cordón UmbilicalDokumen6 halamanAmnios y Cordón UmbilicalAlexa De La VegaBelum ada peringkat
- 50-0711 El Ministerio Explicado HubDokumen57 halaman50-0711 El Ministerio Explicado HubManuel Caytuiro AguilarBelum ada peringkat
- Sed PerfectosDokumen2 halamanSed PerfectosNorma PeñaBelum ada peringkat
- Excel IntermedioDokumen15 halamanExcel IntermedioRONBelum ada peringkat
- Misterios Del Salmo 91Dokumen5 halamanMisterios Del Salmo 91efrain solorzano romero0% (1)
- Evaluacion para Sala de 5 AñosDokumen7 halamanEvaluacion para Sala de 5 AñosVivi CrespoBelum ada peringkat
- Coeficiente de Fricción EstaticoDokumen2 halamanCoeficiente de Fricción EstaticoCamilo UleBelum ada peringkat
- PptsDokumen35 halamanPptsAdrian Alexis Arias JaureguiBelum ada peringkat
- Lab Oratorio 1Dokumen7 halamanLab Oratorio 1Manuel SosaBelum ada peringkat
- 6ta Semana HLDokumen7 halaman6ta Semana HLERICK LUQUEBelum ada peringkat
- Reingenieria de Una Ilusión (ONG Conflicto y Paz) GZ PDFDokumen204 halamanReingenieria de Una Ilusión (ONG Conflicto y Paz) GZ PDFKapu Tejiendo VidaBelum ada peringkat
- Recopilacion de Hispacad Por Carlos Vicente SolisDokumen12 halamanRecopilacion de Hispacad Por Carlos Vicente SolisVicente Solis CarlosBelum ada peringkat
- Ensayo Otoniel GranadosDokumen1 halamanEnsayo Otoniel GranadosMarianela MasyRubiBelum ada peringkat
- Respuestas Unidad 1Dokumen14 halamanRespuestas Unidad 1Alexis Zamora FloresBelum ada peringkat
- Modos Griegos RESUMENDokumen7 halamanModos Griegos RESUMENJesús Di CesareBelum ada peringkat
- Análisis de La Problemática de La Educación Nacional SílaboDokumen4 halamanAnálisis de La Problemática de La Educación Nacional SílaboLeinoto Macedo CórdovaBelum ada peringkat
- Análisis Costo BeneficioDokumen7 halamanAnálisis Costo BeneficioFernanda RoblesBelum ada peringkat
- Cdi Tarjetas de VerificacionDokumen4 halamanCdi Tarjetas de VerificacionBelen SanabriaBelum ada peringkat
- Reporte Semanas CotizadasDokumen5 halamanReporte Semanas CotizadasFelipe SalaBelum ada peringkat
- Los Hidrocarburos Alcanos para Sexto de PrimariaDokumen3 halamanLos Hidrocarburos Alcanos para Sexto de PrimariaMtra Sofy ChaconBelum ada peringkat
- Exposición Del Sena LunaDokumen11 halamanExposición Del Sena LunaALBERTO GERMAN NARANJO RAMIREZ100% (1)
- FORMATO Detalles ConstructivosDokumen37 halamanFORMATO Detalles ConstructivosAxel HernándezBelum ada peringkat