Anda mungkin juga menyukai
- Ejercicios Capitulo 2Dokumen5 halamanEjercicios Capitulo 2Cesar Chicharo VelazquezBelum ada peringkat
- Parcial RespuestasDokumen30 halamanParcial Respuestasluchi4lorena4sabala91% (11)
- Guía 1 - Met NumericosDokumen6 halamanGuía 1 - Met NumericosAngel BandaBelum ada peringkat
- Metodo MontanteDokumen24 halamanMetodo MontanteMary Leny Justiniano MelgarBelum ada peringkat
- Sillabus de Investigacion de Operaciones Unp PDFDokumen10 halamanSillabus de Investigacion de Operaciones Unp PDFHenry GarciaBelum ada peringkat
- 10 Lotka VolterraDokumen9 halaman10 Lotka VolterraAyleen Yamileth PlacenciaBelum ada peringkat
- Practica2 ScilabDokumen4 halamanPractica2 ScilabEduardo RodriguezBelum ada peringkat
- Lab 09 Sintonizacion PID Metodo de OscilacionDokumen8 halamanLab 09 Sintonizacion PID Metodo de OscilacionJherson Miranda CabanillasBelum ada peringkat
- Presentación Decision TreesDokumen10 halamanPresentación Decision TreesBeba Delgado SuárezBelum ada peringkat
- 7 - Compensación de Sistemas RealimentadosDokumen16 halaman7 - Compensación de Sistemas RealimentadosgongumaBelum ada peringkat
- Edwin Fabricio Rivera - 3073018 - Actividad 6.1Dokumen15 halamanEdwin Fabricio Rivera - 3073018 - Actividad 6.1JavierRiveraBelum ada peringkat
- Sem 23 24 Sesion 3 Metodos de Division de PolinomiosDokumen3 halamanSem 23 24 Sesion 3 Metodos de Division de PolinomiosEva PuescasBelum ada peringkat
- S02.s1 Rev2Dokumen41 halamanS02.s1 Rev2Carolina CaceresBelum ada peringkat
- Prueba de Las CorridasDokumen6 halamanPrueba de Las CorridasMaribelBelum ada peringkat
- Modelo Matematico de Un Sensor Resistivo de TemperaturaDokumen4 halamanModelo Matematico de Un Sensor Resistivo de Temperaturadiego ivan perea montealegreBelum ada peringkat
- Autocorrelación y Homocedasticidad Noviembre 2021Dokumen65 halamanAutocorrelación y Homocedasticidad Noviembre 2021Alan GonzálezBelum ada peringkat
- Mod I - 6 Cripto Clasica y ModernaDokumen71 halamanMod I - 6 Cripto Clasica y ModernaNancy CascoBelum ada peringkat
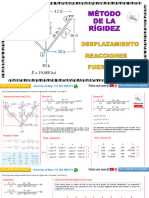
- Método de La Rigidez en Armaduras Desplazamientos, Reacciones y Fuerzas KassimaliDokumen9 halamanMétodo de La Rigidez en Armaduras Desplazamientos, Reacciones y Fuerzas KassimaliELVIS DAVID VASQUEZ JIMENEZBelum ada peringkat
- Ec de Grado Superior ResumenDokumen5 halamanEc de Grado Superior ResumenAxel K. RamosBelum ada peringkat
- Madrigal Davalos - TF P PDFDokumen14 halamanMadrigal Davalos - TF P PDFjuan.madrigal8520Belum ada peringkat
- Sistema de Dos Ecuaciones Lineales Con Dos Incógnitas 1 BachilleratoDokumen11 halamanSistema de Dos Ecuaciones Lineales Con Dos Incógnitas 1 BachilleratoAlexandra RamírezBelum ada peringkat
- Examen U1 - Peche - MelanyDokumen17 halamanExamen U1 - Peche - MelanyMelany Geraldine PecheBelum ada peringkat
- Control No LinealDokumen6 halamanControl No LinealRobertoCollantesSaenzBelum ada peringkat
- Investigación OperativaDokumen8 halamanInvestigación OperativaChilo Camacho YonathanBelum ada peringkat
- Problema de MezclasDokumen3 halamanProblema de MezclasMARIA FERNANDA URBANO ROJASBelum ada peringkat
- PaginaDokumen5 halamanPaginaRobPBelum ada peringkat
- Presentación 6 - BDokumen29 halamanPresentación 6 - Byajaira sthefania acuña arenasBelum ada peringkat
- Distribucion F de Cola DerechaDokumen1 halamanDistribucion F de Cola DerecharaizdeeulerBelum ada peringkat
- Tarea 7 Solución de Sistema de Ecuaciones Lineales Inversa AdjuntaDokumen8 halamanTarea 7 Solución de Sistema de Ecuaciones Lineales Inversa Adjuntajvancc2605Belum ada peringkat