Anda mungkin juga menyukai
- SynopsisDokumen10 halamanSynopsismaheshshewale87Belum ada peringkat
- Share Robotic ArmDokumen6 halamanShare Robotic Armdeepthi velicharlaBelum ada peringkat
- Design and Implement of Robotic Arm and Control of Moving Via Iot With Arduino Esp32Dokumen11 halamanDesign and Implement of Robotic Arm and Control of Moving Via Iot With Arduino Esp32jerry akerBelum ada peringkat
- Abstract SysDokumen8 halamanAbstract Sysmaheshshewale87Belum ada peringkat
- Design and Implement of Robotic Arm and Control of Moving Via Iot With Arduino Esp32Dokumen11 halamanDesign and Implement of Robotic Arm and Control of Moving Via Iot With Arduino Esp32Faldhevire CraftBelum ada peringkat
- Hand Gestureand Voice Controlled Smart VehicleDokumen5 halamanHand Gestureand Voice Controlled Smart VehicleSAHITHLAL HOWDEKARBelum ada peringkat
- Mobile Controlled Wireless Based Approch For Human Robot InteractionDokumen31 halamanMobile Controlled Wireless Based Approch For Human Robot InteractionRajkumarPanchalBelum ada peringkat
- Vicky Final ProjectDokumen42 halamanVicky Final Projectkutty vickyBelum ada peringkat
- Floor RobotDokumen48 halamanFloor RobotTanvi gaikwadBelum ada peringkat
- Automatic Pick and Place Robotic Arm Vehicle: IjarcceDokumen3 halamanAutomatic Pick and Place Robotic Arm Vehicle: Ijarccebendali nadirBelum ada peringkat
- Andi 2018 IOP Conf. Ser. Mater. Sci. Eng. 453 012067Dokumen9 halamanAndi 2018 IOP Conf. Ser. Mater. Sci. Eng. 453 012067jujun juniadiBelum ada peringkat
- F L8 TA 202 NC Part ProgrammingDokumen4 halamanF L8 TA 202 NC Part ProgrammingAqsa Khanam0% (1)
- 1 s2.0 S1877705812026847 Main PDFDokumen7 halaman1 s2.0 S1877705812026847 Main PDFBala MuraliBelum ada peringkat
- Pick and Place Arm Movement Control by AndroidDokumen61 halamanPick and Place Arm Movement Control by Androidnagaraju75% (4)
- P&P Report PDFDokumen10 halamanP&P Report PDFJûstîn TiwariBelum ada peringkat
- Integration of Home Assistance With A Gesture Controlled Robotic ArmDokumen5 halamanIntegration of Home Assistance With A Gesture Controlled Robotic ArmTajbia HossainBelum ada peringkat
- Graphical User Interface Based Wireless Controlled Environment Monitoring RobotDokumen12 halamanGraphical User Interface Based Wireless Controlled Environment Monitoring RobotIJRASETPublicationsBelum ada peringkat
- Voice Based Robotic Arm VehicleDokumen4 halamanVoice Based Robotic Arm VehicleInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Internet Controlled Robotic Arm: Wan Muhamad Hanif Wan Kadir, Reza Ezuan Samin, Babul Salam Kader IbrahimDokumen7 halamanInternet Controlled Robotic Arm: Wan Muhamad Hanif Wan Kadir, Reza Ezuan Samin, Babul Salam Kader IbrahimNIKHIL ASBelum ada peringkat
- Robotic Arm Control Through Mimicking of Miniature Robotic ArmDokumen7 halamanRobotic Arm Control Through Mimicking of Miniature Robotic Armbendali nadirBelum ada peringkat
- Robotic Arm Based On Internet of Things (Iot) : Under The Guidance ofDokumen15 halamanRobotic Arm Based On Internet of Things (Iot) : Under The Guidance ofsharon. thellaBelum ada peringkat
- Pick and Place Robotic Arm Implementation Using ArduinoDokumen9 halamanPick and Place Robotic Arm Implementation Using Arduinodhinesh dinsBelum ada peringkat
- Information Science and Engineering Virtual HandDokumen42 halamanInformation Science and Engineering Virtual HandGouty XavieriteBelum ada peringkat
- Voice Controlled RobotDokumen7 halamanVoice Controlled RobotIJRASETPublicationsBelum ada peringkat
- Arduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash GuptaDokumen3 halamanArduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash Guptaabhishek kumarBelum ada peringkat
- Wireless Mobile Robotic ArmDokumen7 halamanWireless Mobile Robotic ArmUendel DiegoBelum ada peringkat
- 4 Industrial Revolution: Mechatronics and IotDokumen12 halaman4 Industrial Revolution: Mechatronics and Iotنور جمال عبدالحليمBelum ada peringkat
- Robot Control Design Using Android SmartphoneDokumen8 halamanRobot Control Design Using Android Smartphoneسجاد حبيبBelum ada peringkat
- Industrial Robotic Arm Report SummaryDokumen19 halamanIndustrial Robotic Arm Report SummaryKshitij BandarBelum ada peringkat
- Acclerometer Based RobotDokumen48 halamanAcclerometer Based RobotNani SainathBelum ada peringkat
- Modular Armed Advanced Robotic System 2018 - 19Dokumen56 halamanModular Armed Advanced Robotic System 2018 - 19neweraBelum ada peringkat
- Akhila Sem (22Dokumen10 halamanAkhila Sem (22ISHMAELBelum ada peringkat
- Smart Tanker Robot For Security Operations in The Protected Area With Wireless Secured CommunicationDokumen70 halamanSmart Tanker Robot For Security Operations in The Protected Area With Wireless Secured CommunicationSaran SivaprasadBelum ada peringkat
- Foreign 2Dokumen8 halamanForeign 2Rhodora A. BorjaBelum ada peringkat
- Line Following Robot ResearchDokumen4 halamanLine Following Robot ResearchtherealslimBelum ada peringkat
- Smartphone Controlled Robotic Vehicle With Unique Bearing Alignment Mechanism and Robotic Arm For Dangerous Object DisposalDokumen6 halamanSmartphone Controlled Robotic Vehicle With Unique Bearing Alignment Mechanism and Robotic Arm For Dangerous Object DisposalEditor IJTSRDBelum ada peringkat
- Human Motion Controlled Wireless RobotDokumen4 halamanHuman Motion Controlled Wireless RobotIJSTEBelum ada peringkat
- Arduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringDokumen8 halamanArduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringAbhishekBelum ada peringkat
- Gerture Controlled RobotDokumen8 halamanGerture Controlled RobotresearchparksBelum ada peringkat
- SmartvacuumrobotDokumen6 halamanSmartvacuumrobotBhavana DornalaBelum ada peringkat
- IoT Line Follower Robotic ApplicationsDokumen23 halamanIoT Line Follower Robotic ApplicationsnikitaBelum ada peringkat
- (IJCST-V11I2P3) :mr. A. Sriram, BV.N. Tanmayee Gayatri, G. Ashritha, C. Supriya ReddyDokumen4 halaman(IJCST-V11I2P3) :mr. A. Sriram, BV.N. Tanmayee Gayatri, G. Ashritha, C. Supriya ReddyEighthSenseGroupBelum ada peringkat
- CSE JournalsDokumen12 halamanCSE Journalsgraphic designerBelum ada peringkat
- MEMS Accelerometer Based Hand Gesture-Controlled RobotDokumen5 halamanMEMS Accelerometer Based Hand Gesture-Controlled RobotIJRASETPublicationsBelum ada peringkat
- Wireless Robotic Arm Motion ControlDokumen6 halamanWireless Robotic Arm Motion ControlMuhammad AdnanBelum ada peringkat
- S151122 Hand Motion Controlled Robotic Arm PDFDokumen5 halamanS151122 Hand Motion Controlled Robotic Arm PDFSara AlabwainiBelum ada peringkat
- The Development of Robot Arm With Smartphone Control Using ArduinoDokumen8 halamanThe Development of Robot Arm With Smartphone Control Using Arduinodavid frybergBelum ada peringkat
- AbhishekDokumen13 halamanAbhishekAbhishek ChettyBelum ada peringkat
- DEVELOPMENT OF ROBOTIC ARM USing (1) - 1Dokumen27 halamanDEVELOPMENT OF ROBOTIC ARM USing (1) - 1Keshav Salgotra CEC208020Belum ada peringkat
- Fin Irjmets1682969720Dokumen7 halamanFin Irjmets1682969720aryanBelum ada peringkat
- 10 OnlineDokumen8 halaman10 OnlinearyanBelum ada peringkat
- Fundamental Concepts of Internet of Things (IOT)Dari EverandFundamental Concepts of Internet of Things (IOT)Belum ada peringkat
- A Study On Gesture Control Ardiuno RobotDokumen8 halamanA Study On Gesture Control Ardiuno RobotElakkiya DasanBelum ada peringkat
- JoystickcontrolledindustrialroboticsystemDokumen5 halamanJoystickcontrolledindustrialroboticsystemSanjeev KumarBelum ada peringkat
- COPPELIASIMDokumen7 halamanCOPPELIASIMRooban SBelum ada peringkat
- Design and Implementation of Spy RobotDokumen12 halamanDesign and Implementation of Spy Robotshunmathi100% (2)
- Multitasking Military Spying RobotDokumen5 halamanMultitasking Military Spying RobotIJARSCT JournalBelum ada peringkat
- Gesture Replication Robo-ArmDokumen10 halamanGesture Replication Robo-ArmIJRASETPublicationsBelum ada peringkat
- Implementation of Iot Based Smart Laboratory: M. Poongothai A. L. Karupaiya R. PriyadharshiniDokumen4 halamanImplementation of Iot Based Smart Laboratory: M. Poongothai A. L. Karupaiya R. PriyadharshiniJorge Mario TATIS NARANJOBelum ada peringkat
- IotDokumen9 halamanIotsharon. thellaBelum ada peringkat
- (Cse) 15-16 (Es) Co - Po Mapping and JustificationDokumen9 halaman(Cse) 15-16 (Es) Co - Po Mapping and Justificationsharon. thella100% (2)
- Robotic Arm Based On Internet of Things (Iot) : Under The Guidance ofDokumen15 halamanRobotic Arm Based On Internet of Things (Iot) : Under The Guidance ofsharon. thellaBelum ada peringkat
- Energy Minimization Technique For Pilot ContaminationDokumen2 halamanEnergy Minimization Technique For Pilot Contaminationsharon. thellaBelum ada peringkat
- TextDokumen1 halamanTextsharon. thellaBelum ada peringkat
- TextDokumen1 halamanTextsharon. thellaBelum ada peringkat
- Confined Space SafetyDokumen33 halamanConfined Space SafetyEneyo VictorBelum ada peringkat
- SWOT AnalysisDokumen6 halamanSWOT Analysishananshahid96Belum ada peringkat
- EE114-1 Homework 2: Building Electrical SystemsDokumen2 halamanEE114-1 Homework 2: Building Electrical SystemsGuiaSanchezBelum ada peringkat
- Talon Star Trek Mod v0.2Dokumen4 halamanTalon Star Trek Mod v0.2EdmundBlackadderIVBelum ada peringkat
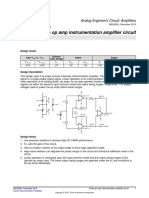
- Opamp TIDokumen5 halamanOpamp TIAmogh Gajaré100% (1)
- PH Miracle Complete Whole Body Alkalizing Program-1201724Dokumen20 halamanPH Miracle Complete Whole Body Alkalizing Program-1201724joao carlos100% (1)
- Government of The Punjab Primary & Secondary Healthcare DepartmentDokumen3 halamanGovernment of The Punjab Primary & Secondary Healthcare DepartmentYasir GhafoorBelum ada peringkat
- Verification of First Law V-SonometerDokumen3 halamanVerification of First Law V-SonometerRick astley's microphoneBelum ada peringkat
- Diferencias Gas LP y Gas Natural: Adminigas, S.A. de C.VDokumen2 halamanDiferencias Gas LP y Gas Natural: Adminigas, S.A. de C.VMarco Antonio Zelada HurtadoBelum ada peringkat
- An Improved Ant Colony Algorithm and Its ApplicatiDokumen10 halamanAn Improved Ant Colony Algorithm and Its ApplicatiI n T e R e Y eBelum ada peringkat
- Project On International BusinessDokumen18 halamanProject On International BusinessAmrita Bharaj100% (1)
- Activity2 Mba 302Dokumen2 halamanActivity2 Mba 302Juan PasyalanBelum ada peringkat
- Afrah Summer ProjectDokumen11 halamanAfrah Summer Projectاشفاق احمدBelum ada peringkat
- VISCOSITY CLASSIFICATION GUIDE FOR INDUSTRIAL LUBRICANTSDokumen8 halamanVISCOSITY CLASSIFICATION GUIDE FOR INDUSTRIAL LUBRICANTSFrancisco TipanBelum ada peringkat
- Reaction CalorimetryDokumen7 halamanReaction CalorimetrySankar Adhikari100% (1)
- Newton Raphson Method MCQDokumen15 halamanNewton Raphson Method MCQmd junaidBelum ada peringkat
- Exercise C: Cocurrent and Countercurrent FlowDokumen6 halamanExercise C: Cocurrent and Countercurrent FlowJuniorBelum ada peringkat
- Operation Manual TempoLink 551986 enDokumen12 halamanOperation Manual TempoLink 551986 enBryan AndradeBelum ada peringkat
- Case Acron PharmaDokumen23 halamanCase Acron PharmanishanthBelum ada peringkat
- UTC awarded contracts with low competitionDokumen2 halamanUTC awarded contracts with low competitioncefuneslpezBelum ada peringkat
- Löwenstein Medical: Intensive Care VentilationDokumen16 halamanLöwenstein Medical: Intensive Care VentilationAlina Pedraza100% (1)
- Batool2019 Article ANanocompositePreparedFromMagn PDFDokumen10 halamanBatool2019 Article ANanocompositePreparedFromMagn PDFmazharBelum ada peringkat
- Parenteral NutritionDokumen78 halamanParenteral NutritionImen YunieBelum ada peringkat
- Case Study, g6Dokumen62 halamanCase Study, g6julie pearl peliyoBelum ada peringkat
- AWK and SED Command Examples in LinuxDokumen2 halamanAWK and SED Command Examples in Linuximranpathan22Belum ada peringkat
- Skype Sex - Date of Birth - Nationality: Curriculum VitaeDokumen4 halamanSkype Sex - Date of Birth - Nationality: Curriculum VitaeSasa DjurasBelum ada peringkat
- EasyLogic PM2000 Series - METSEPM2130Dokumen4 halamanEasyLogic PM2000 Series - METSEPM2130ٍJordan SportBelum ada peringkat
- Galley cleaning hazards and controlsDokumen9 halamanGalley cleaning hazards and controlsRosalie RosalesBelum ada peringkat
- TSGE - TLGE - TTGE - Reduce Moment High Performance CouplingDokumen6 halamanTSGE - TLGE - TTGE - Reduce Moment High Performance CouplingazayfathirBelum ada peringkat
- Farm mechanization subsidy applications invitedDokumen2 halamanFarm mechanization subsidy applications inviteddraqbhattiBelum ada peringkat