Anda mungkin juga menyukai
- Elements of SCRUM in Student Robotics ProjectDokumen10 halamanElements of SCRUM in Student Robotics ProjectAbel Varghese DavidBelum ada peringkat
- 3D Localization and Mapping for Disaster Rescue RobotsDokumen7 halaman3D Localization and Mapping for Disaster Rescue RobotsAbel Varghese DavidBelum ada peringkat
- DSL305E FAQ and Troubleshooting GuideDokumen12 halamanDSL305E FAQ and Troubleshooting GuideAbel Varghese DavidBelum ada peringkat
- Sensors 10 06901Dokumen47 halamanSensors 10 06901owen674sBelum ada peringkat
- Gitex Floorplan New v3Dokumen1 halamanGitex Floorplan New v3Abel Varghese DavidBelum ada peringkat
- TheInstitute Sep 2017Dokumen20 halamanTheInstitute Sep 2017Abel Varghese DavidBelum ada peringkat
- RA 725: Haptic Interfaces: Jose JamesDokumen15 halamanRA 725: Haptic Interfaces: Jose JamesAbel Varghese DavidBelum ada peringkat
- FT - Mac OSDokumen79 halamanFT - Mac OSAbel Varghese DavidBelum ada peringkat
- Elementary AlgorithmsDokumen622 halamanElementary AlgorithmsAbel Varghese DavidBelum ada peringkat
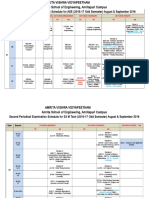
- Time Table - Second PeriodicalDokumen2 halamanTime Table - Second PeriodicalAbel Varghese DavidBelum ada peringkat
- M Tech S3 TTDokumen2 halamanM Tech S3 TTAbel Varghese DavidBelum ada peringkat
- What and HowDokumen1 halamanWhat and HowAbel Varghese DavidBelum ada peringkat
- 10 Conde Auton DRV SimulDokumen11 halaman10 Conde Auton DRV SimulAbel Varghese DavidBelum ada peringkat
- Mobile Robots and Autonomous VehiclesDokumen2 halamanMobile Robots and Autonomous VehiclesAbel Varghese DavidBelum ada peringkat
- Jlobo PHD Poster June 2007Dokumen1 halamanJlobo PHD Poster June 2007Abel Varghese DavidBelum ada peringkat
- PR Intro Motor Selection Training FINAL KWDokumen2 halamanPR Intro Motor Selection Training FINAL KWAbel Varghese DavidBelum ada peringkat
- Project Progress Tracking for Wireless Sensor Network SystemDokumen3 halamanProject Progress Tracking for Wireless Sensor Network SystemAbel Varghese DavidBelum ada peringkat
- BCI For Robotic Applications-Dr - Ganesha Udupa (Amrita Kollam)Dokumen1 halamanBCI For Robotic Applications-Dr - Ganesha Udupa (Amrita Kollam)Abel Varghese DavidBelum ada peringkat
- Proposal For Minor Project: Project Title: Search & Recuse Using HuskyDokumen1 halamanProposal For Minor Project: Project Title: Search & Recuse Using HuskyAbel Varghese DavidBelum ada peringkat
- Proposal For Minor Project: Project Title: Search & Recuse Using HuskyDokumen1 halamanProposal For Minor Project: Project Title: Search & Recuse Using HuskyAbel Varghese DavidBelum ada peringkat
- Automated Contaminated Soil Site MonitoringDokumen1 halamanAutomated Contaminated Soil Site MonitoringAbel Varghese DavidBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- EM100 Training PDFDokumen111 halamanEM100 Training PDFAris Bodhi R0% (1)
- 9608 Example Candidate Responses Paper 3 (For Examination From 2016)Dokumen71 halaman9608 Example Candidate Responses Paper 3 (For Examination From 2016)Shakila ShakiBelum ada peringkat
- Homogeneous and Heterogeneous SystemDokumen7 halamanHomogeneous and Heterogeneous SystemRamaBelum ada peringkat
- The Fork System CallDokumen10 halamanThe Fork System Callpriya1788ekBelum ada peringkat
- Regex Toy: Testing Regular Expressions in Abap: SDN ContributionDokumen8 halamanRegex Toy: Testing Regular Expressions in Abap: SDN Contributionchira_florinBelum ada peringkat
- Iot Network Architecture and Design: Mms Institut Teknologi DelDokumen19 halamanIot Network Architecture and Design: Mms Institut Teknologi DelBasry Answar SihotangBelum ada peringkat
- Innotech Viewport OperatingDokumen2 halamanInnotech Viewport OperatingPacifico FrancoBelum ada peringkat
- Config de Router Cisco 2600Dokumen3 halamanConfig de Router Cisco 2600Djgio MixBelum ada peringkat
- Eonstor Ds SeriesDokumen15 halamanEonstor Ds SeriesVanBelkumWBelum ada peringkat
- 4NSYS 960H Series Real-Time H.264 DVR with Dual Stream and Mobile ViewingDokumen4 halaman4NSYS 960H Series Real-Time H.264 DVR with Dual Stream and Mobile ViewingCorrado BiancoBelum ada peringkat
- Excel Programming Tutorial 1: Macros and FunctionsDokumen13 halamanExcel Programming Tutorial 1: Macros and FunctionsSk AkashBelum ada peringkat
- MatrixPlus3 Release 2dot4 060306Dokumen2 halamanMatrixPlus3 Release 2dot4 060306Renzo Satti100% (1)
- Eeprom - 24LC256Dokumen28 halamanEeprom - 24LC256mars1972Belum ada peringkat
- Possible Questions and Possible Answers For Css InterviewDokumen4 halamanPossible Questions and Possible Answers For Css InterviewAllan TomasBelum ada peringkat
- Queue Implementation Using Linked ListDokumen2 halamanQueue Implementation Using Linked ListHassan ZiaBelum ada peringkat
- 3 - C++ ProgrammingDokumen44 halaman3 - C++ ProgrammingLakshmi Sai RavulaparthiBelum ada peringkat
- Applications of Cloud ComputingDokumen9 halamanApplications of Cloud ComputingParth GabhaneBelum ada peringkat
- Quickspecs: HP 280 G2 Small Form Factor Business PCDokumen30 halamanQuickspecs: HP 280 G2 Small Form Factor Business PCjesusBelum ada peringkat
- Network Communication Protocols (UDP/TCPDokumen10 halamanNetwork Communication Protocols (UDP/TCPCENTRAL UNITRACKERBelum ada peringkat
- Find and Disable Inactive Computers in Active Directory ScriptDokumen3 halamanFind and Disable Inactive Computers in Active Directory ScriptFrederico SoaresBelum ada peringkat
- Panel PC Technical Specification SummaryDokumen2 halamanPanel PC Technical Specification SummaryArroz Frito Poki de LimónBelum ada peringkat
- WEEK 4 MTD3043 Requirements ModellingDokumen2 halamanWEEK 4 MTD3043 Requirements Modellingpaishh channelBelum ada peringkat
- HL - 2 - 2486P 2011 - 10 (1) (Specification of Communication Between Pt4V and LIMS)Dokumen23 halamanHL - 2 - 2486P 2011 - 10 (1) (Specification of Communication Between Pt4V and LIMS)Jose Perez PerezBelum ada peringkat
- Stopwatch in Android MicroprojectDokumen15 halamanStopwatch in Android MicroprojectRahul B. FereBelum ada peringkat
- Read MeDokumen786 halamanRead MejccforeverBelum ada peringkat
- Parallel Job TutorialDokumen186 halamanParallel Job Tutorialkapil3157Belum ada peringkat
- Star TopologyDokumen8 halamanStar TopologyAbigail ParungaoBelum ada peringkat
- OCS 4.X TroubleshootingDokumen96 halamanOCS 4.X Troubleshootingvadym_kovalenko4166Belum ada peringkat
- APDevFundamentals4.1 SetupDokumen3 halamanAPDevFundamentals4.1 Setupedward2Belum ada peringkat
- Systems Engineer With Experience in DevelopingDokumen3 halamanSystems Engineer With Experience in DevelopingAlexis Guzman ValverdeBelum ada peringkat