Anda mungkin juga menyukai
- Caso WattsDokumen13 halamanCaso WattsGustavo ChoqueBelum ada peringkat
- Pavimentos Rigidos para CarreterasDokumen77 halamanPavimentos Rigidos para CarreterasEsther HoltBelum ada peringkat
- Grados de Tubería de Producción J55, N80, C75, P110Dokumen11 halamanGrados de Tubería de Producción J55, N80, C75, P110ANDREA NICOLE TOLEDO CAZASBelum ada peringkat
- GT-D-01 Pasos para El Mantenimiento de Instrumentos v02Dokumen3 halamanGT-D-01 Pasos para El Mantenimiento de Instrumentos v02Alutemp DuchasBelum ada peringkat
- Edificio Reforma de La CDMXDokumen63 halamanEdificio Reforma de La CDMXEsmeralda TreviñoBelum ada peringkat
- Mijail Bajtin. La IdeaDokumen2 halamanMijail Bajtin. La IdeaKatherine HeimBelum ada peringkat
- Trinomio Cuadrado Perfecto Por Adición y SustracciónDokumen12 halamanTrinomio Cuadrado Perfecto Por Adición y Sustracciónalejandro soteloBelum ada peringkat
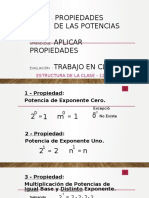
- 03 Propiedades de Las PotenciasDokumen21 halaman03 Propiedades de Las PotenciasDavid Esteban Quezada MieresBelum ada peringkat
- 201.249.180.234_anaco__siceudo_reportes_record_academico.php_cedula=25994619&esp=2115&tipo=completas&nucleoUsr=EXTENSION REGION CENTRO SUR ANACO&codNucleoUsr=31&tipoEstu=regular&operacion=601Dokumen3 halaman201.249.180.234_anaco__siceudo_reportes_record_academico.php_cedula=25994619&esp=2115&tipo=completas&nucleoUsr=EXTENSION REGION CENTRO SUR ANACO&codNucleoUsr=31&tipoEstu=regular&operacion=601Samuel Malave SarobeBelum ada peringkat
- Check List Orden y Limpieza Lugares de TrabajoDokumen6 halamanCheck List Orden y Limpieza Lugares de TrabajoTeresa Romero Salinas0% (1)
- Mapas de KarnaughDokumen13 halamanMapas de KarnaughRossana Ramirez ZeceñaBelum ada peringkat
- La Luz y El ColorDokumen42 halamanLa Luz y El ColorAnonymous sbrU1XU86UBelum ada peringkat
- Giovanni Reale Introduccion A AristotelesDokumen212 halamanGiovanni Reale Introduccion A AristotelesIgnacio OtamendiBelum ada peringkat
- Definicion y Formulas de Ratios FinancierosDokumen4 halamanDefinicion y Formulas de Ratios FinancierosVeronica Huaccan GutierrezBelum ada peringkat
- 08 Morseteria 230911Dokumen18 halaman08 Morseteria 230911Luis Francisco Calderon EspinozaBelum ada peringkat
- Texto Resistencia Corredores-LeibarDokumen248 halamanTexto Resistencia Corredores-LeibarOskar VillamarBelum ada peringkat
- Cuaderno de Tercero de Eso Educacic3b3n Afectivo SexualDokumen50 halamanCuaderno de Tercero de Eso Educacic3b3n Afectivo Sexualedwin5152Belum ada peringkat
- Baleares Cuaderno de Pesca Marítima Recreativa 2016Dokumen36 halamanBaleares Cuaderno de Pesca Marítima Recreativa 2016haypescaBelum ada peringkat
- Calendarios Escolares-190 DiasDokumen1 halamanCalendarios Escolares-190 DiasGina ValtierraBelum ada peringkat
- 2008 Ruben Alvarado - Salud Mental en InmigrantesDokumen5 halaman2008 Ruben Alvarado - Salud Mental en InmigrantescarlapinochetBelum ada peringkat
- Pijama Surf 02 - Esta Es La Forma Más Simple y Poderosa de Eliminar Tus MiedosDokumen2 halamanPijama Surf 02 - Esta Es La Forma Más Simple y Poderosa de Eliminar Tus MiedosGabriel Robinson Sergio Cuba OportoBelum ada peringkat
- Evolución de Las Tecnologías y Técnicas CulinariasDokumen77 halamanEvolución de Las Tecnologías y Técnicas Culinariassaramalo68Belum ada peringkat
- Check List Control Documental SeguridadDokumen4 halamanCheck List Control Documental SeguridadMichelle Ziegler GalarzaBelum ada peringkat
- Guia para La Selección de Protector Respiratorio EcopetrolDokumen9 halamanGuia para La Selección de Protector Respiratorio Ecopetrolfredy905Belum ada peringkat
- Las Exportaciones de Gas Natural A Brasil y Su Impacto Al Crecimiento Economico de BoliviaDokumen3 halamanLas Exportaciones de Gas Natural A Brasil y Su Impacto Al Crecimiento Economico de BoliviaJorge VeltranBelum ada peringkat
- Análisis de Un Movimiento Armónico Simple y Amortiguado en Un Sistema MasaDokumen6 halamanAnálisis de Un Movimiento Armónico Simple y Amortiguado en Un Sistema MasaJuan DBelum ada peringkat
- P.S. 012-Pva-Ralli-2023Dokumen8 halamanP.S. 012-Pva-Ralli-2023Alexander SilvaBelum ada peringkat
- DescripcionDokumen7 halamanDescripcionWendy Chacon MarquinaBelum ada peringkat
- Caso Valoracion de EmpresaDokumen3 halamanCaso Valoracion de Empresaemerson vallejosBelum ada peringkat
- Plan Decimo ArtesDokumen16 halamanPlan Decimo ArtesJohana Vargas SáenzBelum ada peringkat