Anda mungkin juga menyukai
- Plan de Reforzamiento de Tecnologia 3Dokumen3 halamanPlan de Reforzamiento de Tecnologia 3leidy lopez100% (5)
- Importancia de Las Ciencias Básicas para La Formación y Desarrollo Del Conocimiento de Un Ingeniero.Dokumen3 halamanImportancia de Las Ciencias Básicas para La Formación y Desarrollo Del Conocimiento de Un Ingeniero.Bryant KmiloBelum ada peringkat
- Del Experto en Eficiencia Al Ingeniero IndustrialDokumen6 halamanDel Experto en Eficiencia Al Ingeniero IndustrialCinthya VallesBelum ada peringkat
- Clase 8.1Dokumen7 halamanClase 8.1jorge luisBelum ada peringkat
- Fundamentos ProyectoDokumen10 halamanFundamentos ProyectoPephee Gtz MartinezBelum ada peringkat
- Act Informe Componente PracticoDokumen20 halamanAct Informe Componente PracticoGestión CDC-FDCBelum ada peringkat
- Sistemas de NumeraciónDokumen4 halamanSistemas de NumeraciónHéctor Quiñonez100% (1)
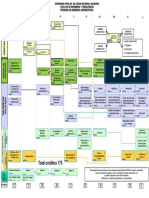
- Pensum Ingenieria AgroindustrialDokumen1 halamanPensum Ingenieria AgroindustrialPREGRADO UPC AGUACHICA0% (1)
- Guía de Trabajo Final O Capstone Project para La Obtención Del Grado de Bachiller Carrera de Ingeniería Civil Universidad San Ignacio de LoyolaDokumen52 halamanGuía de Trabajo Final O Capstone Project para La Obtención Del Grado de Bachiller Carrera de Ingeniería Civil Universidad San Ignacio de LoyolaInternet se paga soloBelum ada peringkat
- 01 Resultados SICAOEA-STRUCTURALIA 2021Dokumen3 halaman01 Resultados SICAOEA-STRUCTURALIA 2021LeslieBelum ada peringkat
- Economia Internacional UPN 2014-1Dokumen7 halamanEconomia Internacional UPN 2014-1Raúl AngelBelum ada peringkat
- Modulo DCUDokumen23 halamanModulo DCUPasantías UniversitariasBelum ada peringkat
- Ensayo Comercio Exterior y Nuevas TecnologiasDokumen2 halamanEnsayo Comercio Exterior y Nuevas TecnologiasEdison David CastroBelum ada peringkat
- Coeficiente de Manning ImprimirDokumen9 halamanCoeficiente de Manning ImprimirJosé Carlos TorrezBelum ada peringkat
- TrazabilidadDokumen12 halamanTrazabilidaddanielBelum ada peringkat
- Ingenieria Mecánica Industria 4.0Dokumen5 halamanIngenieria Mecánica Industria 4.0Antonio Gómez M.Belum ada peringkat
- Secuencia Didáctica de Programacion Orientada A Objetos Academia 1Dokumen7 halamanSecuencia Didáctica de Programacion Orientada A Objetos Academia 1Enrique RodriguezBelum ada peringkat
- KJNJNJ 2012Dokumen1 halamanKJNJNJ 2012결경0% (1)
- Intro PDFDokumen11 halamanIntro PDFdeyfer_196Belum ada peringkat
- Club de EmprendedoresDokumen4 halamanClub de EmprendedoresxiviBelum ada peringkat
- AGENDA DE FRANJAS PARA GIMNASIO CAMPUS AVENIDA UNIVERSITARIA (Respuestas)Dokumen10 halamanAGENDA DE FRANJAS PARA GIMNASIO CAMPUS AVENIDA UNIVERSITARIA (Respuestas)ROMAN RODRIGUEZ JIMENEZBelum ada peringkat
- Guía de Proyectos UdlDokumen27 halamanGuía de Proyectos UdlCarlos GP100% (1)
- Job ShadowingDokumen42 halamanJob ShadowingI.E.S. El CarrascalBelum ada peringkat
- Beca para Comedor.Dokumen149 halamanBeca para Comedor.Anonymous R7ZgpHX5bpBelum ada peringkat
- Ficha Academica: Universidad Nacional de IngenieriaDokumen1 halamanFicha Academica: Universidad Nacional de IngenieriaSandra ChaucaBelum ada peringkat
- Planes de Estudios de La Universidad Autónoma de Santo DomingoDokumen4 halamanPlanes de Estudios de La Universidad Autónoma de Santo DomingoSergio PichardoBelum ada peringkat
- Alicia PDFDokumen211 halamanAlicia PDFCamila Lopez MachadoBelum ada peringkat
- Laboratorio 6Dokumen8 halamanLaboratorio 6williBelum ada peringkat
- UpsDokumen2 halamanUpsGarcía VásquezBelum ada peringkat
- Portafolio de ProyectosDokumen9 halamanPortafolio de ProyectosOmar FranzuaBelum ada peringkat