Capítulo 03 - Modelagem Matemática de Sistemas Mecânicos e E PDF
Diunggah oleh
Pedro Tavares Murakame0 penilaian0% menganggap dokumen ini bermanfaat (0 suara)
10 tayangan35 halamanJudul Asli
Capítulo 03 - Modelagem Matemática de Sistemas Mecânicos e E.pdf
Hak Cipta
© © All Rights Reserved
Format Tersedia
PDF atau baca online dari Scribd
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
© All Rights Reserved
Format Tersedia
Unduh sebagai PDF atau baca online dari Scribd
0 penilaian0% menganggap dokumen ini bermanfaat (0 suara)
10 tayangan35 halamanCapítulo 03 - Modelagem Matemática de Sistemas Mecânicos e E PDF
Diunggah oleh
Pedro Tavares MurakameHak Cipta:
© All Rights Reserved
Format Tersedia
Unduh sebagai PDF atau baca online dari Scribd
Anda di halaman 1dari 35
fo}
|
i=]
B
i
C4
ov
Modelagem matematica
de sistemas mecanicos
e elétricos
3.1 | Introducdo
Este capitulo apresenta a modelagem matemiatica de sistemas mecénicos c elétricos. No Capi-
tulo 2, obtivemos modelos matematicos de um circuito elétrico simples ¢ de um sistema mecinico
simples, Neste capitulo, consideramos a modelagem matematica de varios sistemas mecanicos €
elétricos que podem fazer parte de sistemas de controle.
lei fundamental que governa os sistemas mecéinicos & a segunda lei de Newton. Na Sego 3.2
aplicamos essa lei a varios sistemas mecnicos e derivamos modelos em fungao de transferéncia
© modelos em espaco de estados.
As leis basicas que govemam os circuitos elétricas sio as leis de Kirchhoff. Na Segio 3.3,
‘obtemos 05 modelos em fungi de transferéncia e espago de estados de varios circuitos elétricos
¢ sistemas amplificadores operacionais que podem fazer parte de muitos sistemas de controle.
3.2 | Modelagem matematica de sistemas mecanicos
Exemplo 3.1
Esta segdio discute, inicialmente, modelos simples com molas e modelos simples com amor-
tecedores. Depois, derivamos os modelos em fungdo de transferéncia e espago de estados de
vvirios sistemas mecanicos.
Obtemos as constantes de mola para os sistemas mostrados nas figuras 3.1(a) ¢ (b), respectiva-
mente,
Para as molas em paralelo [Figura 3.1(a)], a constante de mola equivalente k,, & obtida a
partirde
hut x= Fo hyx
ou
kth th
Para as molas em série (Figura 3.1(b)], a forga em cada mola a mesma. Portanto,
Age
—— —
Captulo 3 Medelagem matersica de temas mecinicoseeléicos SE
FIGURA 3.1
(a) Sistema que
consiste em
dduas molas em
paralelo;
(b) sistema que
consiste em duas
molas em série.
Qo” nae
&
by ‘ 7
Z
o
A climinagio do y nessas duas equagées resulta em
| ou ,
|
| yx = ‘the
Aconstante de mola equivalente k, para esse caso é, entio, encontrada como
=F. ae
fae Rk
Exemplo 3.2 Obtenhamos o coeficiente de atrito viscoso equivalent b,, para cada um dos sistemas amorte-
cedores mostrados nas figuras 3.2(a) ¢(b). Um amortecedor de émbolo muitas vezes & chamado
amortecedor a pistio, Um amortecedor a pst ¢ um dispostivo que proporcionsaatrito viscoso,
ou amortecimento, Ele consiste em um pistio e um cilindro com éleo. Qualquer movimento
relativo entre a haste do pistio e ocilindro encontra a resisténcia do dleo, porque este deve fur
em volta do pistio (ou através de orifcios no préprio piso), de um lado a outro. Em esséncia,
«© amortecedor a pistio absorve energia, Essa energia absorvida dissipa-se na forma de ealor e 0
amortecedor a pistio nfo armazena qualquer energia cintica ou pote
(@) A forga fdevido aos amortecedores ¢
I= BV ~2) + b= 3) = (by + YG 3)
Em termos do coeticiente de ato viscoso equivalente by a forga fé dada por
f= bi 3)
Entio
bg=b, tbs
(b)A forga fdevido 20s amortecedores €
f= b( -4) = 6-2) Bl)
. FIGURA32 : . a
(a) Doi b
amortecedores — he
conectados em ;
paaleo; 4
{b) dois HS
mortecedores z ee 7 7
conectados em a o
série
HEBER cco de console modem
Exemplo 3.3
‘onde 2 & 0 deslocamento de um ponto entre os amortecedores b, € by. (Observe que a mesma
forga é transmitida através do eixo.) Da Equagao 3.1, temos
O14 b)E= byt bee
oa
sa apRey th) 62)
~ Em termos do cocficiente de atrto viscoso equivalente by, forga fé dada por
I= bal-3)
‘Substituindo-se a Equagio 3.2 na Equagao 3.1, temos
S= by ~2) = b,]p— Fh a+ bai)
+b,
Portanto,
bib;
fa bqG-9 = FPEO-D ;
Ent,
Considere o sistema massa-mola-amortecedor montado em um carro sem massa, como mostra a
Figura 3.3. Obtenhamos os modelos mateméticos desse sistema, presumindo que 0 carro
~esteja parado para 1 <0 ¢ que o sistema de massa-mola-amortecedor do carra também esteja
FIGURA33
Sistema de
massa-mola-
amortecedor
‘montado em um,
carro,
pparado para <0. Nesse sistema, u(t) ¢ 0 deslocamento do carro ea entrada do sistema. Em 1= 0,
© carro se move em velocidade constante, ou ii = constante. O deslocamento y(¢) da massa é a
saida: (O deslocamento é relativo ao chiio.) Nesse sistema, m indica a massa; b, 0 coeficiente de
atrito viseoso; ¢ k, a constante de mola. Supomos que a forga de atrito do amortecedor a pistio
seja proporcional aie que a mola seja uma mola linear, isto é, a forga da mola é proporcio-
nala y=.
Para sistemas translacionais, a segunda lei de Newton diz que
ma= SF
(Caro de mass nla
He
Caphulo 3 ~-Modelgem matemca de sistemas mectnicoscclévicos IH
conde m & uma massa, a é a acelerago dessa massa e F € o somatério das forgas em ago sobre
‘a massa na diregdo da aceleragio a, Aplicando-se a segunda lei de Newton ao sistema em questo
ce observando que 0 carro ¢ isento de massa, ternos
ky -u)
ou
moe
Dy hy = 5d
4b + by = bE hu
Essa equagio representa um modelo matematico do sistema em questi, Tomando-se a transfor-
mada de Laplace da diltima equagao e presumnindo zero como condig2o inicial, temos
(ms? + bs + RYY(5) = (bs + NU(S)
‘Tomando a relagio entre ¥(s) € U(s), encontramos a fungao de transferéncia do sistema, que é
(9-19). 2 sk
UG) ms + bs +k
Tal representagao de um modelo matemético por fungdo de transferéncia é usada com frequéncia
na engenharia de controle.
Em seguida, obteremos o modelo em espago de estdos desse sistema. Primeiro, faremos a
comparagaio da equacio diferencial do sistema
b
ib
rs
Fungo de transferéncia
i
‘com a forma-padrio
Pray tay = bli bait byw
¢ identificamos a,, a, by b, € by como segue:
a=2, a=£, b=0,
m m
Em referéncia & Equacao 2.35, temos
By=by=0
B= by -aBp= &
hb), -axBy=
[Em seguida, em referéncia a Equagao 2.34, definimos
Bury
A partir da Equagdo 2.36, temos
aye Bue.
=~ ayn; + Bae
a equacio de sada torma-se
ou
G3)
TERRIER eoceonaia de contote nodena
r=
x
| G4)
As equagdes 3.3 ¢ 3.4 fornecem uma representago do sistema em espago de estados. (Observe
que esta néo ¢a tnica representagdo em espaco de estados. Existem intimeras representagdes de
espago de estados para o sistema)
Exemplo 3.4 Obtenha as fungdes de transferéncia Xi(s)/U{s) € 44(s)1U(S) do sistema mecénico mostrado na
Figura 34.
‘As equagiies de movimento para o sistema apresentado na Figura 3.4 sio:
= hit — hala) 23) — BG — 4) +
fam ~ hal x1) ~ BG, - 4)
‘Simplificando, obtemos:
im + Bi + (+ Aad = by + hans +
sigh bit, + (ky + ky) = bit + key
Obtendo a transformada de Laplace dessas duas equagdes, admitindo condigdes iniciais nulas,
obtemos: *
Lis? +s (ky +4] Xi) = (bs +) Xs) + Us) 65)
Lims* + bs + (ky + ks] Xs) = (bs + ka) X(s) G6)
Resolvendo a Equa¢ao 3.6 para X%(s), substituindo-a na Equagio 3.5 e simplificando, temos:
(los? + Bs + ky sys? + Bs + hy + hy) — (Bs + hy] Xs) = (ns? + bs + by + b)US)
a partir da qual obtemos:
Xs) _ ms" + bs + hy thy an
US) ~ (ms? + 5 + + Kylongs? + Bs + ky HK) — (Os + #
A partir das equagdes 3.6 e 3.7, temos:
bth, 8)
* Wat + O54 + hms? + bs +h) (os hp
As equagiies 3.7 ¢ 3.8 silo as fungdes de transferéncia X(sVU(s) € X, (sVU(s), respectivamente.
FIGURA34
Sistema ¥ 5 *
mecinico, Y
IE p
om om he
h | ty
Seam om,
Exemplo 3.5 Um péndulo invertido montado em um carro motorizado é mostrado na Figura 3.5(a). Este é um
‘modelo de controle de posicio de um foguete na fase de langamento. (O objetivo do problema
de controle de posigdo é manter 0 foguete em uma posigdo vertical.) O péndulo invertido & ins-
‘avel, pois pode cair a qualquer instante, para qualquer direedo, a menos que uma forga adequada
de controle sejaaplicada a ele. Vamos considerar aqui somente um problema bidimensional, em
ue 0 movimento do péndulo fica restrito apenas ao plano da pagina. A forga de controle u é
Capitulo 3 Modelagem matemitca de sistemas mecinicos eelévicos
FIGURAI.S
GaSstema sy :
de péndulo 7
inverido; 8 y
(rdiagamade |, :
corpo lve f
che if
> #
9 OF : 9 ‘
woe] ee se "
ic rte
7. 7
»
aplicada a0 catro, Considere que 0 centro de gravidade da haste do péndulo esteja situado no
centro geométrico dele. Obtenhia um modelo matematico para esse sistema.
Defina o angulo da haste a partir da linha vertical como 0. Estabelega também as coordenadas
(x,y) do centro de gravidade da haste como (X, yc). Entio,
xgaxtfsen 8
ver los 0
Para deduzir as equagdes de movimento do sistema, considere o diagrama do corpo livre, mos-
trado na Figura 3.5(5). © movimento rotacional da haste do pendullo em tomo de seu centro de
‘gravidade pode ser deserito por:
10 = Visen 0 ~ Hl cos 8 G9)
‘onde / € 0 momento de inércia da haste em relagdo ao centro de gravidade.
O movimento horizontal do centro de gravidade da haste do péndulo € dado por:
m£(e4 Ise) =H 6.10)
O movimento vertical do centro de gravidade da haste do péndulo é
£(te0s0) =V—mg G1)
O movimento horizontal do carto é descrito por:
aud
Seu-H G12)
de
‘Como devemos manter o péndulo invertido na posigao vertical, podemos admitir que OMe
(0 sejam grandezas suficientemente pequenas para que se possa fazer sen 0 8, cos 0 = 1
€ 00? =0, Entdo, as equagies de 3.9 9 3.11 podem ser linearizadas como se segue:
10 = Vib HI G13)
(+15 = H) G4)
0=V—mg G.15)
Com o auxitio das equagies 3.12 € 3.14, obtemos:
(M+ mye + ml G.16)
HERBIG erserharia de contote moderne
Exemplo 3.6
FIGURA 3.6
Sistema de
péndulo
invenido,
E, a partir das equagdes 3.13, 3.14 ¢ 3.15, obtemos:
18 = mgi)— HI
= mgid — Ki + mid)
(I+ mE) + mit = meld @G.17)
As equagies 3.16 ¢ 3.17 deserever 0 movimento do sistema de péndulo invertido sobre 0 carro,
Elas constituem um modelo matematico do sistema,
Considere o sistema de péndulo invertido mostrado na Figura 3.6. Como nesse sistema a massa
esté concentrada no topo da haste, o centro de gravidade € 0 centro da bola do péndulo. Para esse
aso, 0 momento de inéreia do péndulo sobre seu centro de gravidade é pequeno e vamos supor
que /= 0 na Equagio 3.17. Entdo, 0 modelo matemitico para esse sistema passa a ser:
(M+ me + mld =u G.18)
ml?Q + mbt = mg G.19)
‘As equagdes 3.18 e 3.19 podem ser modificadas para
MIO = (M+ m)g6—u (3.20)
Me=u—mg0 * G21)
‘A Equacio 3.20 foi obtida pela eliminagao de £ das equagdes 3.18 e 3.19. A Equagdo 3.21 foi
obtida pela eliminacio de @ das equagdes 3.18 e 3.19. Utilizando a Equagio 3.20, obtemos a
fungao de transteréncia da planta como:
Os) 1
—U(s) © Mis? = (M+ mg
oa L 4
Mem,\,_ [Mem
sales [Me al{s (Mets
O sistema de péndulo invertido tem um polo no semicixo negativo do eixo real
(V1 mM) fg] e outro m0 semivixo psitivo docixo real [s = (V H+ mV Mi) 'g]
Entéo, a planta é instével em matha aberta,
fn
wae] ow
api
lo 3 ~ Modelagem matemstica de sistemas mecinicas e elétricos
Defina as varidveis de estado x, x, x5 € x, como:
Observe que o Angulo 0 indica a rotagdo da haste do péndulo em torno do ponto P ex € a loca-
lizagdo do carro. Se considerarmos fe x como saidas do sistema, entio
bl-Pl+E|
(Note que tanto 6 como x so quantidades facilmente mensurdveis) Entdio, a partir da definigaio
das varidveis de estado pelas equagdes 3.20 e 3.21, obtemos:
y
hen
~ Mime, 1 y
aoe
Baile
Met
Em termos de equagdes vetoriis-matriciais, temos:
a} Lee OMT [9
S| ace m i
lis] fag & °° Us) aa] 3.22)
J] 0 00 tft) 0 |"
x) [ate 00 Ol) | 7
x
Ly] _fi 0 0 alfa
Ly} [0 0 1 alls G23)
x)
As equagdes 3.22 e 3.23 so uma representagdo do sistema de péndulo invertido no espago de
estados. (Note que a representacdo no espaco de estados do sistema nio é tnica, Existe uma
infinidade de representagdes possiveis para esse sistema.)
3.3 | Modelagem matematica de sistemas elétricos
As leis basicas que regem os circuitos elétricos sio as leis de Kirchhoff das correntes e das
tensées. A lei das correntes de Kirchhoff (lei dos nés) diz que a soma algébrica de todas as cor-
rentes que entram e saem de um né ¢ zero. (Esa lei também pode ser enuneiada como se segue:
‘a soma das correntes que chegam a um né ¢ igual & soma das correntes que saem desse nb.) A le
das tenses de KirchhoI (lei das malhas) estabelece que, em qualquer instante, a soma algébri-
ca das tensbes a0 longo de qualquer matha de um circuito elétrico é zero. (Essa lei também pode
ser enunciada da seguinte maneira: a soma das quedas de tensto ¢ igual a sumta das elevagdes de
tensio ao longo de uma malha.) Um modelo matematico de um circuito elétrico pode ser obtido
pela aplicagdo de uma ou ambas as leis de Kirehhoff
Esta sega trata, inicialmente, dos cireuitos ele
tmatica de sistemas com amplificadores operacionais
08 simples e, depois, da modelagem mate-
HERE crsenara de conrole moder
Gi ERC. Considere o circuito elétrico mostrado na Figura 3.7. circuito consiste em uma
indutancia L (henry), uma resisténcia R (ohm) ¢ uma capacitincia C (Farad). Aplicando a lei das
tensdes de Kirchhoff ao sistema, obtemos as seguintes equagics:
i ae
da rirk fide=e, (8.24)
tfidae, (6.25)
As equagées 3.24 e 3.25 fornecem um modelo matematico do circuito.
‘Um modelo de fungdo de transferéncia do circuito também pode ser obtido como a seguir: con-
siderando as transformadas de Laplace das equagdes 3.24 e 3.25 e supondo condigdes iniciais
nulas, obtemos:
Lis) = B(6)
Lst(s) + RU(s)+-& +
ee
c
Llysy=
Ets) = E68)
Se admitirmos que ¢,seja a entrada e que ¢, sejaa saida, entio a fungi de transferéncia desse
sistema sera:
EAs) 1
E(s) LCs + RCs +1
‘Um modelo no espago de estados do sistema mostrado na Figura 3.7 pode ser obtido da seguinte
‘maneira: primeiro, note que a equagao diferencial do sistema pode ser obtida a partir da Equagio
3.26 como:
(3.26)
ia
Beri
Entio, definindo as variaveis de estado por:
as varidveis de entrada ede saida port
obtemos:
0 1 0
[i|- Lo alse
| Lc LI) [LC
.
van
FIGURA 3.7 ~
Circuito elétrico. L R
FIGURA3.8
Sistema elétrico,
Caputo 3- Modelagem matemsics de sitamas mectnicos eetvicos
Essas duas equagdes constituem um modelo matematico do sistema no espaco de estados.
Fungao de transferéncia de elementos em cascata. Muites sistemas com realimentago tém
ccomponentes com efeito de carga sobre outros. Considere o sistema mostrado na Figura3.8. Admita
que, seja entrada e que e sejaa sada. As capaciténcias Ce C, no esto carregadasinicialmente
‘Vamos mostrar que 0 segundo estigio do circuito (porgao R,C,) produz um efeito de carga
sobre o primeiro estagio (porgo R,C,). As equagiies desse sistema so:
Ef adr Ri =e, 27)
fi
Ef Gina Rint
efit
Transformando por Laplace as equagies de 3.27 a 3.29, respectivamente, e considerando con-
digdes iniciais nulas, temos:
a 3.28)
G29)
GeO - HO + RAG) = B15) 630)
LCs) — A(s]+ hls) + 7 Als) = 0 G31)
thls) = EC) G32)
Gs
Eliminando /(s) das equagdes 3.30 ¢ 3.31 e escrevendo £,(s) em termos de /(s), encontramos a
fungdo de transferéncia entre E,(s) € E,(s) como:
pba) essa ecealeecesesac
Bs) ~ (RGs+ WRGs+ ) FRC,
*RGRGS+RG+RC+RC)+s41 oo
Otermo R,C,s no denominador da fungdo de transferéncia representa a interacdo de dois circui-
tos RC simples. Como (Ry, + RsC; + RyCy)* > AR\C\RyCy, a5 duas raizes do denominador da
Equagio 3.33 sao reais,
Essa andlise mostra que, se dois circuitos RC esto conectados em cascata, de modo que a
saida do primeiro circuito seja a entrada do segundo, a fungdo de transferéncia global nao é 0
produto de 14R,C,s + 1) e V(R:C35 + 1). A razao para isso & que, quando deduzimos a fungio
de transferéncia para um circuito isolado, estamos presumindo implicitamente que a saida do
Circuito esteja sem carga. Em outras palavras, a impedincia de carga ¢ admitida como infinita,
‘0 que significa que nenhuma poténcia esti sendo retirada da saida. Quando o segundo circuito
esti conectado A saida do primeiro, entretanto, certa poténcia é consumida e, assim, @ suposigio
de que nfo ha carga na saida do primeito circuito ¢ falsa. Portanto, se a fungio de transferéncia
HIRI Excess de conte mode
dsse sistema for obtida sob a hipétese de nao haver essa carga, entio ela ndo sera valida. O grau
do efeito de carregamento determina quanto a fungao de transferéncia seré alterada
Impedancias complexas. Na obtengio de fungdes de transferéncia de circutos elétricos, com
frequéncia achamos preferivel eserever diretamente a transformada de Laplace das equacdes,
sema necessidade de escrever as equagdes diferenciais. Considere o sistema mostrado na Figura
3.9(a). Nesse sistema, Ze Z, representam impedincias complexas. A impedéncia complexa do
23) de um circuito de dois terminais é a relagao entre Es), a transformada de Laplace da tensio
nos terminais, ¢ (s), a transformada de Laplace da corrente nos elementos do circuito, sob a
hipétese de que as condigoes iniciais so nulas, ou sea, Z(s) = (s/s). Se os elementos de dois
terminais forem um resistor R, uma capaciténcia C ou uma indutncia L, entdo a impedincia
complexa sera dada por R, 1/Cs ou Ls, respectivamente. Se as impedincias complexas forem
conectadas em série, a impedncia total seré a soma das impedincias complexas individuais.
Devemos lembrar que a abordagem da impedéncia ¢ valida somente se as condigdes iniciais
envolvidas forem nulas. Nessas condigdes, a determinago da fungao de transferéneia de um
cireuito elétrico pode ser obtida a partir do conceito de impedincia complexa, Essa abordagem
simplifica muito a dedugo das funedes de transferéneia de circuitos elétricos.
Considere o circuito indicado na Figura 3.9(b). Suponha que as tensdes ¢, e, sejam a entrada
a saida do cireuito,respectivamente. Entio, a fungao de transfergncia desse circuito é:
EAs) Z(s)
Els) Z(s)+2(s)
Para o sistema mostrado na Figura 3.7,
1
G
Zabs+R Z
Entdo, a fungio de transferéncia £,(s)/E,(s) pode ser determinada como se segue:
ihe cecigees eee
teers dL PEROT
‘a qual é,evidentemente,idéntica & Equagao 3.26.
FIGURA 39
Gircuitos
eléricos. a °
« al «
®
Exemplo 3.7, Considere novamente o sistema mostrado na Figura 3.8. Obtenha a fungao de transferéncia,
E,6)/E{8) por meio da abordagem de impedancia complexa. (Os capacitores C, ¢ C, no estio
inicialmente carregados.)
O circuito mostrado na Figura 3.8 pode ser redesenhado como o da Figura 3.10(a), 0 qual
pode, em seguida, ser modificado para o da Figura 3.10(b).
No sistema mostrado na Figura 3.10(b), a corrente / divide-se em duas correntes f, ¢ 4. AO
bservar que
Zh=GrZb hth
FIGURA3.10
@) Ocitcuito
da Figura 3.8
indicado em
termos de
impedancias;
(b) diagrama
do circuito
‘equivalente.
a
Capitulo 3 ~ Modelagem matemsca de sistemas mecinicse léicos
obtemos:
Meo con
GrGee” !"ZaAtZ!
Ao observar que
a 2G+2))
Bo) = 1+ Ze =| +
ZZ,
aya
B()=2h= zt
obtemos:
E,(s) ZZ,
=
Eis) AAtB+Z)+Z(G+Z)
Substituindo Z, = Rj, Zs = LCs), Z,= Ry € Z= (Cs) na iltima equagao, temos:
> RGRGS+(RG FRC + RCs +1
que & a mesma dada pela Equagao 3.33.
ea
ot2zndzhH~ a 2D
Eds) ah eects
ea % | 0 ‘a
o——_ Lima o—__+_l_
a
Fungies de transferéncia de elementos sem carga em cascata. A fungi de transferéncia
1, se Ry(R, +R) > VK, entio
e ( + ah
Essa equagio fomece a tenstio de saida c,, Como e, ¢¢, tém os mesmos sinais, o circuito com
amplificador operacional mostrado na Figura 3.15(a) € nfo inversor.
A 15
(@) Amplificador
coperacional
nao inversor, a
(b) circuto
cequivalente.
@ ®
Exemplo 3.8 A Figura 3.16 mostra um citeuito elétrico com um ampliticador operacional. Obtena a safda e,
Definindo
de’ ~e,
oa
@
Notando-se que a corrente que flui pelo amplificador & desprezivel, temos:
Athti
Entio,
Como e'+ 0, temos:
a
Capitulo 3- Modelgem matensics de sites mecnicose lics, ERI
FIGURA 3.16
Gircuito de atraso 4 &
de primeira
cordem com i
amplifcador
‘onal Rs
opera 2g
Considerando a transformada de Laplace dessa iiltima equag2o e supondo condigdes iniciais
nulas, temos:
que pode ser escrita como:
O cireuito com amplificador operacional exposto na Figura 3.16 é um cireuito de atraso de pri-
rmeira ordem. (Varios outros circuitos que envolvem amplificadores operacionais so mostrados
nna Tabela 3.1, com suas respectivas fungdes de transferéncia, A Tabela 3.1 é dada na pigina 75.)
Uso da impediincia para a obtencio das fungdes de transferéncia, Considere o circuito
‘com amplificador operacional mostrado na Figura 3.17. Da mesma maneira que no caso dos cir-
cuitos elétricos discutidos anteriormente, o método da impedincia pode ser aplicado aos circuitos
com amplificadores operacionais para a obtengdo de suas fungdes de transferéncia. No caso do
circuito apresentado na Figura 3.17, temos:
E(s)— E's)
0, temos:
(334)
FIGURA 3.17 i
Cireuito com 1)
amplifieador 20
foperacional
: Ks
on
Fe ©
£@)
BERBER engeonvia de contote moderne
Exemplo 3.9
FIGURA 3.1
(@) Circuito com
amplificador
‘operacional;
(6) cireuito com
amplificador
‘operacional
utilizado como
compensador
de avanco ou de
alraso,
Tomando como referéncia o ctcuito com amplificador operacional mostrado na Figura 3.16,
obtenha a fungdo de transferénciaE,(sVE,(s) pela wtilizagdo do método da impedancia.
{As impedincias complexas Z;(s) e 2) para esse circuit so:
\ R,
=R, ¢ Z(s)=—L =
eRe AG) oe Gel
Ry
A fungdo de transferéncia £,(s)/E(s) é, portanto, obtida como:
Els) __ 2ls)__
Els) Z(s) Rt RCo+T
que, evidentemente, é a mesma obtida no Exemplo 3.8.
Redes de avanco ou atraso com amplificadores operacionais. A Figura 3.18(a) mostra
‘um circuito eletrénico com um amplificador operacional. A fungdo de transferéncia para esse
Circuito pode ser obtida da seguinte maneira: defina a impedancia de entrada ¢ a impediincia de
realimentagao como Z, ¢ Z,, respectivamente. Entao
4
RGs+l
R RCs+1 (335)
Rede de rasa ou de avango Inverse de inal
Capito 3 Modsagem matemiadesstemas mectics eelévioe RAL
Observe que a funao de transferéncia na Equacdo3.35 contém o sinal negativo, Assim, esse
circuit ¢inversor de sina. Se essa inversdo de sinal ndo for conveniente no caso real, um circuito
inversor de sinal podera ser conectado tanto a entrada como safda do citcuto da Figura 3.18(a).
Um exemplo ¢ mostrado na Figura 3.18(b). O inversor de sinal tem a fungio de transferéneia de
E,(s) __ Ry
Es) Ry
O inversor de sinal tem 0 ganho de ~RY/R,, Entdo, a rede mostrada na Figura 3.18(b) tem a
seguinte fungdo de transferéncia:
G36)
onde
Note que
Essa rede tem um ganho c.c. de Ka = RRY(RiR).
Observe que essa rede, cuja fungdo de transferéncia & dada pela Equagio 3.36, serd uma rede
de avango se RC, > R:C,, ou a < 1. Ela sera uma rede de atraso se R,C, < R:Cy
Controlador PID com amplificadores operacionais. A Figura 3.19 mostra um controlador
eletrdnico proporcional-integral-derivativo (PID) com amplificadores operacionais. fungao de
transferéncia E(s\/E,(s) € dada por:
onde
FIGURA3.19
Controlador
eletrGnico PID.
HEBER cseara de convote modeno ;
Assim,
Els) __ [Ris +1) RGs+l
AGT" Gs |
Notando que
Bs) Ry
Es)
temos:
E,(s) _ Ex(3) £(s) _ RyRy (RiGs + (RCs + 1)
Es) Els) Eis) RR, RGs
RR(RG+RG 1
BRL RC BGs TRC
RRC + RC) 1 R GRC,
BR tt ROIREE Ree 637)
Observe que o segundo circuito amplificador operacional atua tanto como um inversor de sinal
como um ajuste de ganho,
Quando um controlador PID é expresso como: *
E,ls)
Els)
(142+ a}
5
K, échamado ganho proporcional, 7,é denominado tempo integrativo e T,, de tempo derivativo.
A partir da Equagao 3.37, obtemos 0 ganho proporcional K,, 0 tempo integrative T;¢ o tempo
derivativo T,, como:
RURGHRCG)
fo RG
eae :
RG+RG
RRC,
iG + RC,
Quando um controlador PID & expresso como:
E,(s) _ K
oS = K++ Ks
Es)
K, € chamado ganho proporcional, K, tempo integrativo e K,, ganho derivativo, Para esse con-
trolador,
k= Pl Gt RG)
’ RRG
BRG
‘A Tabela 3.1 mostra ums lista de cireitos com amplificadores operacionais que podem ser
utilizados como controladores ou compensadores.
pl’ ose ta slices viens
TABELA 3.1 Circuitos com ampiificadores operacionais que podem ser utlizados como compensadores.
Agdo de controle Circuitos amplificadores operacionais
& &
« tg
RR Pui
! P RR a _
@ %
Rit i a
2 ! RAG ig es
&
Ae amare
3 PD BRAGS) a rae
3 Ry
z
RR, RG s+1 i
4 Pl RR BGs i ® 2
5 PID
Ry R RGs+1
6 | Avango ou atraso RR RCs+1
Re Ry (IR RCS + RCs +1)
7 | Avangoeatrase | ROR (RGS+ DIR + RCS I
HBR evens de contote moderne
| Exemplos de problemas com solucées
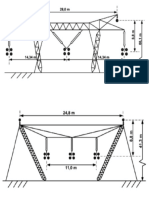
AB.1 A Figura 3.20(@) mostra um diagrama esquemitico do sistema de suspensdo de um automével.
FIGURA 3.20
Quando o carro se move ao Longo da estrada, 0 movimento vertical das rodas age como a propria
fungao de entrada do sistema de suspensio do automével, O movimento desse sistema consiste
«em um movimento de translago do centro de massa e um movimento de rotagao em tomo desse
mesmo centro de massa, O modelo matematico do sistema completo é bastante complicado,
Uma versdo muito simplificada do sistema de suspensio é mostrada na Figura 3.20(b). Admitindo
ue 0 movimento x, no ponto P seja @ entrada do sistema e o movimento vertical x, do corpo
seja a saida, obtenha a fungo de transferéneia Xo(s)/X(s). (Considere o movimento do corpo
somente na dirego vertical.) O deslocamento x9 é medido a partir da posigd0 de equilibrio na
auséncia da varidvel de entrada x,
Solugio. A equago do movimento para o sistema mostrado na Figura 3.20(b) é
Ito + Bly) + hy —x) = 0
ou
Ig + big + kg = be, + hx,
‘Ao considerar a transformada de Laplace da diltima equaga0, e ao sypor condigées iniciais nulas,
obtemos:
(rs? + bs + K)Kos) = (Bs + &) Xs)
Entdo, a fungo de transferéncia Xo(s)/X(s) é dada por:
X60) bs +k
Xs) ~ ma? + bs +
(a) Sistema de
suspensio do
automével;
Wsisema
de suspensio ™
Simple, |
fa. f
Cen demasa
laser
cb ib a
'
@ b)
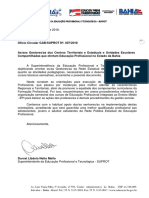
A3.2- Obtenha a fungao de transferéncia ¥(s\/U(s) do sistema mostrado na Figura 3.21. A entrada ué
‘um deslocamento. (Como o sistema do Problema A.3.1, este é também uma versio simplificada
da suspensio de um automével ou de uma motocicleta.)
iE
Capital 3 Modelagem matemitin desta meciicse eévicos EEL
FIGURA3.21
= r
™ |t
oN
Solugo, Suponha que os deslocamentos x e y sejam medidos a partir das respectivas posicdes
de repouso que ocorrem na auséncia da entrada u, Aplicando a segunda lei de Newton a esse
sistema, obtemos:
0-2) +B -3) + ua)
kfy-»)- 0-8)
Entio, temos:
Ime BE + (Ky Habe = bp + kay + ke
mS +09 ky = bE kya
‘Ao considerar a transformada de Laplace dessas duas equagSes e ao supor condigées iniciais
nuts, obtemos:
Ls? + bs + (b+ A))AG) = (65 + AYN) + KU G)
[m,s? + bs + ky] M(s) = (bs +k) Xs)
Eliminando X(s) das duas iltimas equagdes, temos:
(rs bn th RYE EET Ys) 2 Gy +A) S) + KUL)
aque forece:
Ws) hy(bs +h)
U(S) ~ mymys* + (rm, + m,)bs? + [Kym + (om, + m)ka|s” + kbs + ky
A3.3. Obtenha a representagdo em espago de estados do sistema mostrado na Figura 3.22,
Solugdo. As equagdes do sistema so
mrt bi + yy I= 0
+ FIGURA3.22
Sistoma "
HERR eras de convote moderne
ABA
fiGuRA 323
(a) Sistema
(b) sistema
eléirico andlogo.
maja t yyy) =u
‘As varidveis de saida para esse sistema so ye y» Definindo as varidiveis de estado como
nay
waSi
Obtemos entio as seguintes equagdes:
aan
a equagao de saida é
Obtenha a fungdo de transferéncia X,(s)/X(s) do sistema mecénico apresentado na Figura 3.23(a)
a fungao de transferéneia £,(s\/E{s) do sistema elétrico exposto na Figura 3.23(b). Mostre que
@ )
ABS
FIGURA 3.24
Rede em ponte
tipo T.
Caphulo 3 ~ Modelagem matestica de sistemas mecinicoseeévicos RAR
as fungBes de transferéncia dos dois sistemas tém forma idéntica e, portant, eles sBo sistemas
andlogos.
Solugdo. Adiitimos, na Figura 3.59(a), que os deslocamentos x, x € y sejam medidos a partir
das respectivas posigdes de repouso. Assim, as equagdes de movimento para o sistema mecanico
da Figura 3.23(a) so:
biG 0) * kil X0) = Balto 9)
byo= P= hy
‘Tomando as transformadas de Laplace dessas duas equagdes ¢ admitindo condigdes iniciais
nulas, temos:
blsXi(s) —sXols)] + LX (8) ~ XO] = bifsXLs) - 81(5)]
byfsXfs) — s¥s)] =k Ys)
Se eliminarmos 1(3) das duas tltimas equagdes, obtemos:
By fK(0) (0+ HLA) — HI = 69K 6) — ys
ou
(as + k)X(9) = (os +h + bs — bb
Entio, a fungio de transferéncia X,(s)/Xi(s) pode ser abtida por meio de
xuy__ (Resi)
st iffis+ i+ ;
Para o sistema elétrico mostrado na Figura 3.23(b), a fungdo de transferéncia E,(sV/E(s)
ale
Red
Samal, cals
TR rts ** +s
= Gs + RCS +1)
RGs+ INRCs+ )FRGs
Uma comparagao entre as fungdes de transferéncia mostra que os sistemas das figuras 3.23(a)
€ (b) sio andlogos.
Obtenha as fungdes de transferéncia E,(s)/E,(s) dos circuitos em ponte tipo T mostrados nas
figuras 3.24(a) ¢ (b)
HERE crcenaria de conrole moder
Solusiio. Ambos os circuitos em ponte tipo T mostrados podem ser representados pela rede da
Figura 3.25(a), em que utilizamos impedncias complexas. Essa rede pode ser transformada na
‘que esti representada na Figura 3.25(b).
Na Figura 3.25(b), note que:
+h, AL =G+Zh
Ento,
Assim, as tensdes E{s) ¢ E,(s) podem ser obtidas como:
EQ)=Zh+Zh
f ol
Tea
-AGHB+D+ AZZ),
Zt+Z+Z, 7
E,(s)=Zjh+ Zh
~ 24+0(Z +442)
TO Tth+h
FIGURA3.25,
(a) Rede em
ponte tipo T
fem termos de
impedincias
complexas;
(b)rede
equivalent
|
|
AB6
FIGURA 3.26,
Circuito com
amplifcador
‘operacional
Captlo 3 - Modelagem matemstea de sistemas mecinicose elvis. AREY
Entio, a fungo de transferéneia E,(sV£,(s) da rede mostrada na Figura 3.25(a) é obtida como:
Els) ___LZ+ D(A +24 2) aa
BG) ZG+B+Z)+Zh +2,
Para a rede em ponte tipo T mostrada na Figura 3.24(a), substitua
1
aR L=Ty BER ak
na Equagdo 3.38. Entdo, obtemos a funcao de transferéncia £,(sVE,(s), a saber:
eu
BL R +qy(tere
E(s) 1 Vie
alt Rtas +R
= _RORG s+ 2RC5 +1
RC,RC,s? + (2RC, + RC)s + 1
Da mesma maneira, para a rede em ponte tipo T mostrada na Figura 3.24(b), substituimos
z=4 4
= Ge Cy
na Equagao (3.38). Entio, a fungto de transferéncia E,(sVE,(s) pode ser obtida como se segue:
cae Lik.
EEMEE A
Lede ode Jd RL
BEGG he
= __RCR CS + 2R,Cs +L
RCR CH + QAR CHR C)5+ 1
Obtenha a fungdo de transferéncia E,(s)E,s) do citcuito com amplificador operacional mostrado
sna Figura 3.26.
Solugio. A tensio no ponto A é:
of.
‘Atransformada de Laplace dessa tiltima equagao é
£4) = + 20)+ £6)
HERI ercconaria de contol moderno
ABT
Atensio no ponto B é
1
cee A)
Como (Es) ~ E(s)]K= E,(s) € K > 1, devemos ter £,(s) = Ey(s). Assim,
Entiéo,
Obtenha a Fungo de transferéncia E,(s)E(s) do sistema com amplificador operacional indica-
do na Figura 3.27 em termos de impedincias complexas Z,, Zs, Zy ¢ Ze. Utilizando a equagio
derivada, obtenha a fungdo de transferéncia E,(s)/E{s) do sistema com amplificador operacional
indicado na Figura 3.26.
Solugo. A partir da Figura 3.27, temos
E,(s)= Bos)
Zi
ou
(3.39)
Como e
B,(s) = p(s) = 4 Bs) 6.40)
(8) = Bale) = 77 Bi
pela substituigtio da Equagiio 3.40 na Equagao 3.39, obtemos:
2.2, + 22-212, - 242,
[ ZZ) feo
a partir da qual obtemos a fungao de transferéncia £,(s\/E(s) como:
EA) __ 4-2’, aie
Els) BZ +4)
FIGURA 3.27
Gircuito com
amplificador
‘operacional
ABS,
FiGURA 3.28,
Circuito com
amplificador
operacional.
Capitulo 3 ~Modelagem matemtica de sistemas mecinicos e lévicos EE
Para encontrarmos a fungdo de transferéncia £,(s)/E(s) do circuito mostrado na Figura 3.26,
substituimos
a a -
Z=te F=Ry B=Ry LAR
nna Equagdo 3.41. O resultado é:
que 6, como no poderia deixar de ser, o mesmo que o obtido no Problema A.3.6.
Obtenha a fungdo de transferéncia E,(s)/E,(s) do circuito com amplificador operacional mostrado
nna Figura 3.28.
Solugdo, Primeiro, vamos obter as correntes i, iyi, ig @ is. Em seguida, utilizaremos as equagdes
Noné A, temos i, =f, +f + fou
(342)
No né B, temos i, = i, ou
3.43)
Reescrevendo a Equagdo 3.42, temos:
dex [1
Oat (k (3.44)
A partir da Equagao 3.43, temos
(6.45)
Substituindo a ne 3.45 na Equagao 3.44, obtemos
fe
(aot
TEBE exseaaria de contte modeno
‘Tomando a transformada de Laplace dessa iltima equagdo e admitindo condigdesiniciais nulas,
obtemos:
5 1 1 f(s)
-GGRs H+ (Re RC ISE SS) ~ FB) =
4 partir da qual obtemos a fungdo de transferéncia E,(s)E (0), como se segue:
Els) 1
FG) RG RCs +] 434 (aac s+ )
Ry Ry
A3.9° Considere o servossistema indicado na Figura 3.29(a). O motor mostrado é um servomotor, um
motor cc projetado especialmente para sr uilizado em um sistema de controle. A operacio desse
sistema é a seguinte: um par de potenciémetros atua como um dispositivo detector de erros. Eles
onvertem as posigées de entrada e de saida em sinais elétricos proporcionais, O sinal de entrada
de comando determina a posigao angular r do brago do cursor da entrada do potenciémetro. A
Posiefo angular ré a entrada de referencia do sistema, e potencialetrico do cursor é propor-
cional & posigdo angular do brago. A posigio do eixo de saida determina a posi¢ao angular ¢ do
cursor do brago de saida do potenciémetro. A diferenga entre a posigo angular de entrada re a
Posigdo angular de saida c é sinal de erro e, ou *
A diferenga de potencial e, ~e, = e, &0 erro de tensio, onde e,€ proporcional a re e. & propor-
cional ac; isto, ¢,
‘"&€-= Kye, onde Ky €a constante de proporcionalidade. O erro de tensio
FIGURA 3.29,
(2) Diagrama Refrncia Poteet
esquematico do eeniada Se etada
servossistema;
(0) diagrama
de blocos para
6 sistema;
(© diagram
de blocos
simplificado,
\
SH
es
Dispastve de medio de erro Amplitcador
56) hike
Ke ESTRUS + By RR PO]
®
«)
Capitulo 3~ Modelagem matemsica de sislemas mecinicoseelévicos EBB
‘que aparece nos terminais do potenciémetro é amplificado pelo amplificador cuja constante de
ganho é K;. A tensio de saida do amplificador aplicada ao cireuito da armadura do motor c.c.
‘Uma tensio fixa é aplicada a0 enrolamento do campo. Se existir erro, o motor desenvolve um
torque para girar a carga, de modo que reduza o erro a zero. Para a corrente de campo constante,
0 torque desenvolvido pelo motor €:
sie
onde K; €a constante de torque do motor ei, € a corrente da armadura,
Quando a armadura gira, uma tensio proporcional ao produto do fluxo pela velocidade angular é
induzida na armadura. Para um fluxo constante, a tensfo induzida e, &diretamente proporcional
a velocidade angular didi, ou
=@
= kG
onde e, éa feem (forga contra eletromotriz), K, & constante de feem do motor € 0 é 0 desloca-
mento angular do eixo do motor,
Obtenha a fungdo de transferéncia entre o deslocamento angular 8 do eixo do motor e a tenszo
de erro e,, Obtenha também um diagrama de blocos para esse sistema e um diagrama de blocos
simplificado, supondo que L,seja desprezivel
Solugio. A velocidade de um servomotor ¢.¢. controladé pela armadura controlada pela tensio
daarmadura e,, (A tensio da armadura e, = Kye, € saida do amplificador.) A equagdo diferencial
do circuito da armadura é:
di
Let Rist = 0
ou
Se Ri 4 Ky 3.46)
FR tk B= Ke, G46)
A equagio de equilibrio do torque &
y= i G47)
#0, Be
ethan?
‘onde J, €0 momento de inéreia da combinagdo motor, carga e conjunto de engrenagens, referente
20 eixo do motor, ey & 0 coeficiente de atitoviscos0 do conjunto motor, eargae conjunto de
engrenagens do referidoeixo do motor,
Eliminando i, das equagdes 3.46 ¢ 3.47, obtemos:
Os) ekg
E,(s) — s(Las + R)(dos + a) +
a (48)
Ef
‘Vamos supor que a relagao de engrenagens do conjunto de engrenagens seja tal que 0 eixo de
snida gira n vezes para cada volta do eixo do motor. Assim,
Cs) =n) G49
A relagio entre Es), R(s) ¢ C(s) &
Es) = KRG) ~ C(s}] = KoE(s) (3.50)
diagrama de blocos desse sistema pode ser construido a partir das equagdes 3.48, 3.49 € 3.50,
como indica a Figura 3.29(b). A fungao de transferéneia do ramo direto desse sistema &:
G(s) = £8) 89) ils) KyK, Kn
OU) BCs) Els) ~ Sf(Las + Rhos +B) RK]
Quando L, & pequeno, pode ser desprezado e a fungio de transferéncia G(s) do ramo direto
toma-se:
PERE cgernria de conte moderna
Ky Ky Kym
GUS) = Tacs + 6) + Ke
st)
Kiki
Sys + ( +
O termo [by + (K,K,/R,)]s indica que a feem do motor aumenta efetivamente 0 arito viscoso do
sistema. A inércia J ¢ 0 coeficiente de atrito viscoso by + (KKy/R,) referem-se ao eixo do motor.
Quando Jp € by + (KaKy/R,) Sio multiplicados por I/n?, a inéreia e o coetficiente de atrito viscos0
sto expressos em termos do eixo de saida. Introduzindo novos parimetros definidos por:
J= dyin? = momento de inércia referente a0 eixo de saida
B= [by + (K.KR,)I)? = coeficiente de atrto viscoso referente ao eixo de saida
K=KK Kin,
4 fungio de transferéncia G(s) dada pela Equagio 3.51 pode ser simplificada, resultando em:
K
G(s)=
= ee
ou s
K,
=
G(s) Shs Fly
onde
( diagrama de blocos do sistema indicado na Figura 3.29(b) pode, assim, ser simplificado como
mostra a Figura 3.29(c),
| Problemas
B31 Obtenha o coeficiente de arto viscoso b,,equivalente do sistema mostrado na Figura 3.30.
FAGURA 3.30
Sistema de
amortecedores.
B.3.2_Obtenha os modelos matemiticos dos sistemas mecdnicos mostrados nas figuras 3.31(a) e (b).
caphulo3 - Modeligem matendca de sstemas mectnicas elvis EI
FIGURA3.31
Sistemas > id)
mecinicos.
a |?
(Forgedeewain)
Sem ego
@
ae sid
Rae leper yee
(Fora de eta)
Sem igo
®
seeewurnncuinnemerensi teins nein CIS
B33. Obtenha uma representago no espago de estados do sistema mecénico indicado na Figura 3.32,
onde 1 € u; slo as entradas e yy, Sto as saidas.
B34. Considere o sistema de péndulo de mola com carga indicado na Figura 3.33. Suponha que a ago
dda forga da mola sobre o péndulo seje 2ero quand este esté na posigio vertical ou @=0. Suponha
também que o atrto envolvido seja desprezivel e 0 ngulo de oscilagao 0 seja pequeno. Obtenha
‘© modelo matematico do sistema,
B35. Referindo-se aos exemplos 3.5 e3.6, considere o sistema de péndulo invert indicado na Figura
3.34, Suponha que @ massa do péndulo invertdo seja me seja uniformemente distribuida ao longo
dda haste, (O centro de gravidade do péndulo esti localizado no centro da haste.) Supondo que 0
seja pequeno, deduza os modelos matemiticos para o sistema na forma de equagdes diferencias,
fungdes de transferéncia e equagdes no espago de estados,
FIGURA 3.32
Sistema Z (lll.
rmecinico.
FREE] rcernria de console modern
FIGURA 3.33
Sistema de
péndulo de mola
com carga
FIGURA3.34
Sistema de
péndulo
ivertdo,
B3.6 Obtenha as fungdes de transferéncia X;(s)/'U(s) e X,(s)/U(s) do sistema mecdnico indicado na
Figura 3.35.
FIGURA 3.35
Sistema ¥
smecinico, y le
B3.7 Obtenha a fungdo de transferéncia E,(s)/E;(s) do circuito eléttico indicado na Figura 3.36.
FIGURA 3.36
Greuito elétrico.
a
Capitulo 3~Modelogem matenstia de stews mecinicsetéicor EES
B38 Considere o citcuito etrico mostrado na Figura 3.37. Obtenha a fungio de transferéncia E,(s)/
E{s) pelo método do diagrama de blocos.
FIGURA3.37,
Circuito elético. R Re
B3.9Deduza a fungio de transferéncia do circuito elétrico indicado na Figura 3.38. Desenhe um dia-
rama esquemitico de um sistema mecdnico andlogo.
FIGURA3.38
Circuito e
ico. RG
“T
B3.10 Obtenhaa fungi de transferéncia £ (s)/E,(s) do circuito com amplificador operacional indicado
na Figura 3.39.
FIGURA 339
Gircuito com fs
amplificador
‘operacional ea
I
B11 Obtenta a fungio de transferéncia £,(s)E,(s) do cireuito com amplificador operacional indicado
na Figura 3.40.
HEBBIM ogentaris de contole moderne
FIGURA3.40
Circuito com
amplificador
‘operacional
B3.12_Utilizando a abordagem da impedancia, obtenh a funcdo de transferéncia E,(s)/£(s) do cirouito
com amplificador operacional indicado na Figura 3.41.
B.3.13 Considereo sistema mostrado na Figura 3.42. Um servomotor c.c. controlado pela armadura aciona
uma carga constituida por um momento de inércia J,. O torque desenvolvido pelo motor é 7.0
momento de inércia do rotor do motor J, 05 deslocamentos angulares do rotor do motor e do
elemento de carga sio 0, € 0, respectivamente. A relagdo das engrenagens & n= 0/0, Obtenha a
Fungo de transferéncia (sYE(s).
FIGURA 3.41,
Circuito com a
‘amplificador
‘operacional
FIGURA342
Sistema
servomotor ce
controlado pela
armadura,
Anda mungkin juga menyukai
- Iluminação Tug Tue - PaulaDokumen1 halamanIluminação Tug Tue - PaulaPaulinha BezerraBelum ada peringkat
- RoteiroPraticaMedidas Lab3Dokumen1 halamanRoteiroPraticaMedidas Lab3Paulinha BezerraBelum ada peringkat
- RoteiroPraticaMedidas Lab3Dokumen1 halamanRoteiroPraticaMedidas Lab3Paulinha BezerraBelum ada peringkat
- Instalacoes Eletricas 1 PDFDokumen85 halamanInstalacoes Eletricas 1 PDFJéssica RibeiroBelum ada peringkat
- Iluminação Tug Tue - LucasDokumen1 halamanIluminação Tug Tue - LucasPaulinha BezerraBelum ada peringkat
- Iluminação Tug Tue - PaulaDokumen1 halamanIluminação Tug Tue - PaulaPaulinha BezerraBelum ada peringkat
- Iluminação Tug Tue - LucasDokumen1 halamanIluminação Tug Tue - LucasPaulinha BezerraBelum ada peringkat
- 0 Projeto de Instalacoes EletricasDokumen9 halaman0 Projeto de Instalacoes EletricasPaulinha BezerraBelum ada peringkat
- Oficina GabaritoDokumen12 halamanOficina GabaritoPaulinha BezerraBelum ada peringkat
- Matemática para ConcursosDokumen47 halamanMatemática para ConcursosPaulinha Bezerra100% (2)
- 01 Lista de Exercircios Conjuntos NumericosDokumen3 halaman01 Lista de Exercircios Conjuntos NumericosPaulinha Bezerra100% (1)
- Frequencia OficinaDokumen5 halamanFrequencia OficinaPaulinha BezerraBelum ada peringkat
- Apresentação 1Dokumen2 halamanApresentação 1Paulinha BezerraBelum ada peringkat
- Capa TrabalhoDokumen15 halamanCapa TrabalhoPaulinha BezerraBelum ada peringkat
- TransmissãoDokumen3 halamanTransmissãoPaulinha BezerraBelum ada peringkat
- TRABALHODokumen10 halamanTRABALHOPaulinha BezerraBelum ada peringkat
- SI (Sistema Internacional) PDFDokumen3 halamanSI (Sistema Internacional) PDFHeitor AugustoBelum ada peringkat
- Os 5 Maiores Segredos Do Sucesso Nos EstudosDokumen14 halamanOs 5 Maiores Segredos Do Sucesso Nos EstudosCarlos Eduardo AcorsiBelum ada peringkat
- Labirinto Elétrico ensina eletricidadeDokumen6 halamanLabirinto Elétrico ensina eletricidadePaulinha BezerraBelum ada peringkat
- Realizações de homens cansadosDokumen2 halamanRealizações de homens cansadosPaulinha BezerraBelum ada peringkat
- Análise de Sistemas de PotênciaDokumen167 halamanAnálise de Sistemas de PotênciaElSid33Belum ada peringkat
- Iluminacao - OSRAM - Manual Luminotécnico PráticoDokumen28 halamanIluminacao - OSRAM - Manual Luminotécnico Práticosssaulo1Belum ada peringkat
- OficioDokumen5 halamanOficioPaulinha BezerraBelum ada peringkat
- 12 ProjRootLocusDokumen52 halaman12 ProjRootLocusAndré Gomes100% (1)
- PlanilhaDokumen4 halamanPlanilhaPaulinha BezerraBelum ada peringkat
- PLANO DE ENSINO em BrancoDokumen3 halamanPLANO DE ENSINO em BrancoPaulinha BezerraBelum ada peringkat
- Análise de CC Simétricos AulaDokumen50 halamanAnálise de CC Simétricos AulaWisller JeffersonBelum ada peringkat
- Curto Circuito No Sistema Elétrico de Potência - You - TubeDokumen2 halamanCurto Circuito No Sistema Elétrico de Potência - You - TubePaulinha BezerraBelum ada peringkat
- Eletrica - SENAI - Medidas EletricasDokumen57 halamanEletrica - SENAI - Medidas Eletricasanon-721944100% (19)
- Sobre o Papel Do Trabalho - ENGELSDokumen10 halamanSobre o Papel Do Trabalho - ENGELSPaulinha BezerraBelum ada peringkat
- Medidor de Energia Com Interface de Comunicação WirelessDokumen6 halamanMedidor de Energia Com Interface de Comunicação WirelessLeo SantosBelum ada peringkat
- Tic PerisquiDokumen19 halamanTic PerisquiChristiano DomingosBelum ada peringkat
- SIG Conceitos BásicosDokumen50 halamanSIG Conceitos BásicosAry BritoBelum ada peringkat
- Prime instrumentos cirúrgicosDokumen73 halamanPrime instrumentos cirúrgicosGloria BiondoBelum ada peringkat
- ABNT TERMOSDokumen10 halamanABNT TERMOSFlavio LacerdaBelum ada peringkat
- Curso Java Módulo III JDBCDokumen7 halamanCurso Java Módulo III JDBCRafael RamosBelum ada peringkat
- Construção de edifício residencial com 17 pavimentosDokumen11 halamanConstrução de edifício residencial com 17 pavimentosIsmael Filipe De NardiBelum ada peringkat
- Microsoft Word - APOSTILA PARA COLORIR DESENHOS GEOMETRICOSDokumen55 halamanMicrosoft Word - APOSTILA PARA COLORIR DESENHOS GEOMETRICOSIracema ZimmermannBelum ada peringkat
- MI 3200 TeraOhm 10 KV - PRTDokumen45 halamanMI 3200 TeraOhm 10 KV - PRTFranco AyalaBelum ada peringkat
- Protocolo - SertanezinaDokumen2 halamanProtocolo - Sertanezinapedro.cunhaBelum ada peringkat
- Thecnoservice 00120070120Dokumen1 halamanThecnoservice 00120070120RafaelBelum ada peringkat
- Nota Fiscal de Venda de MercadoriaDokumen1 halamanNota Fiscal de Venda de MercadoriaMauricio AlmeidaBelum ada peringkat
- Tipos de cabos e emendas de fibra ópticaDokumen39 halamanTipos de cabos e emendas de fibra ópticaDiego BittencourtBelum ada peringkat
- Manual Evo 550 Cod 50539Dokumen4 halamanManual Evo 550 Cod 50539Wellinton PratesBelum ada peringkat
- Catalogo Blocos de ConcretoDokumen2 halamanCatalogo Blocos de ConcretoGmaiKBelum ada peringkat
- Dispositivo de EntradaDokumen8 halamanDispositivo de EntradaMarcio Luis CarlosBelum ada peringkat
- HMIS-SETAR021 Rev04 Dez2018 - SigmaDokumen110 halamanHMIS-SETAR021 Rev04 Dez2018 - SigmaFlavio SantosBelum ada peringkat
- Sistemas Reservas Fluxos Informação TurismoDokumen3 halamanSistemas Reservas Fluxos Informação TurismoMaria JoãoBelum ada peringkat
- Procedimento de Montagem e Desmontagem Padrà o Normativo de Engenharia..Dokumen20 halamanProcedimento de Montagem e Desmontagem Padrà o Normativo de Engenharia..Welinton AlmeidaBelum ada peringkat
- DVR - GUIA RÁPIDO DE OPERAÇÃO E CONFIGURAÇÃODokumen38 halamanDVR - GUIA RÁPIDO DE OPERAÇÃO E CONFIGURAÇÃOJOSE ADILSON DE OLIVEIRA100% (2)
- Pop 18 - Seleção de Produtos e Embalagens - Frios e LaticíniosDokumen3 halamanPop 18 - Seleção de Produtos e Embalagens - Frios e LaticíniosMarceloUvinhaBelum ada peringkat
- Prova Vitor UltimaDokumen4 halamanProva Vitor UltimaValdenio JuniorBelum ada peringkat
- Soul Imprint: Guia CompletoDokumen12 halamanSoul Imprint: Guia CompletoEvelyn MenezesBelum ada peringkat
- Man - Rep - Transmissão Manual R150F - Publ. #RM996EDokumen89 halamanMan - Rep - Transmissão Manual R150F - Publ. #RM996EMarcel Silveira0% (1)
- Ficha Técnica - Sebr-Qualidade - Normalização - APPCC - Indústria2017Dokumen3 halamanFicha Técnica - Sebr-Qualidade - Normalização - APPCC - Indústria2017Raffael MarottiBelum ada peringkat
- Conjuntos de engate hidráulico para máquinas agrícolas e industriaisDokumen6 halamanConjuntos de engate hidráulico para máquinas agrícolas e industriaisVadinho BenezBelum ada peringkat
- Radunz CustoDokumen6 halamanRadunz CustoAssistencia DenteckBelum ada peringkat
- Manual de operação do HumaClot JuniorDokumen36 halamanManual de operação do HumaClot JuniorAPOIOBelum ada peringkat
- Calculadora C com menuDokumen4 halamanCalculadora C com menuLORENA MENDES DE MORAISBelum ada peringkat
- Planilha para Controle Orçamento FamiliarDokumen9 halamanPlanilha para Controle Orçamento FamiliarChiquinho LeiteBelum ada peringkat