Anda mungkin juga menyukai
- LT3990 Demo Circuit 1471 Quick Start Guide LT3990 62V, 350ma Step-Down Regulator With 2.5 A Quiescent Current and Integrated DiodesDokumen3 halamanLT3990 Demo Circuit 1471 Quick Start Guide LT3990 62V, 350ma Step-Down Regulator With 2.5 A Quiescent Current and Integrated DiodesDmitryBelum ada peringkat
- AN-1349 LM34910 Evaluation Board: User's GuideDokumen5 halamanAN-1349 LM34910 Evaluation Board: User's GuiderolandseBelum ada peringkat
- FP5452 FeelingTechnologyDokumen26 halamanFP5452 FeelingTechnologymartin sembinelliBelum ada peringkat
- Mi21mtech11003 - BM5023 - 2021 - Lab 2Dokumen7 halamanMi21mtech11003 - BM5023 - 2021 - Lab 2Subhranil RoyBelum ada peringkat
- Ka3525 PWM IcDokumen6 halamanKa3525 PWM IcSunartoBelum ada peringkat
- KA3525A FairchildSemiconductorDokumen7 halamanKA3525A FairchildSemiconductorA.hBelum ada peringkat
- PV PanelDokumen17 halamanPV PanelMuhammad RiazBelum ada peringkat
- Final Project MITMagnetic LevitationDokumen5 halamanFinal Project MITMagnetic LevitationfandinoBelum ada peringkat
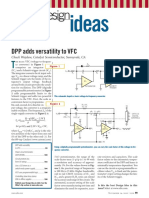
- Simple Addition Permits Voltage Control of DC-DC Converter's OutputDokumen4 halamanSimple Addition Permits Voltage Control of DC-DC Converter's OutputCARLOSBelum ada peringkat
- ADEDokumen10 halamanADEashwinishettytpBelum ada peringkat
- HCF4046B: Micropower Phase-Locked LoopDokumen12 halamanHCF4046B: Micropower Phase-Locked Loopthanhson1989Belum ada peringkat
- Lab 3: Phase-Locked Loop: University of California at Berkeley Department of Electrical Engineering and Computer SciencesDokumen4 halamanLab 3: Phase-Locked Loop: University of California at Berkeley Department of Electrical Engineering and Computer Sciencesashokkmr123Belum ada peringkat
- HA17524Dokumen18 halamanHA175248403c36589584aBelum ada peringkat
- L4973V3.3 - L4973V5.1 L4973D3.3 - L4973D5.1: 3.5A Step Down Switching RegulatorDokumen16 halamanL4973V3.3 - L4973V5.1 L4973D3.3 - L4973D5.1: 3.5A Step Down Switching RegulatorLeandro Matias CoelhoBelum ada peringkat
- 74HCT9046A: 1. General DescriptionDokumen43 halaman74HCT9046A: 1. General DescriptionDanielBelum ada peringkat
- Circuito de FuenteDokumen8 halamanCircuito de FuenteEmer nelsonBelum ada peringkat
- ECE321 - 6th EXPDokumen4 halamanECE321 - 6th EXPمحمد ابراهيمBelum ada peringkat
- TL494 Linear Integrated Circuit: Voltage Mode PWM Control CircuitDokumen7 halamanTL494 Linear Integrated Circuit: Voltage Mode PWM Control CircuitIsrael GonzalesBelum ada peringkat
- PLL XR2212 ExarCorporationDokumen20 halamanPLL XR2212 ExarCorporationHoan TranBelum ada peringkat
- Tone Ringer Interface: DescriptionDokumen6 halamanTone Ringer Interface: DescriptionVasilij PupkinBelum ada peringkat
- R2A20133DDokumen14 halamanR2A20133DLuiz Augusto Freitas SantosBelum ada peringkat
- Chapter 15 PDFDokumen42 halamanChapter 15 PDFPugazhendhi MuthuBelum ada peringkat
- Analog Communication Lab ManualDokumen59 halamanAnalog Communication Lab Manualsasa_sag100% (2)
- SSM 2120 Nivel Detector dn126Dokumen8 halamanSSM 2120 Nivel Detector dn126Edson Francisco SilvaBelum ada peringkat
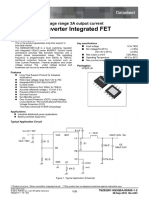
- 8V To 35V, 3.0A 1ch Buck Converter With Integrated FET: DatasheetDokumen21 halaman8V To 35V, 3.0A 1ch Buck Converter With Integrated FET: DatasheetArdhi Purna bagasBelum ada peringkat
- Design of High Performance Voltage-to-Frequency ConvertersDokumen20 halamanDesign of High Performance Voltage-to-Frequency ConvertersUrvish SolankiBelum ada peringkat
- DNSD 339 FDokumen2 halamanDNSD 339 FrajeshdaveBelum ada peringkat
- ML4812CPDokumen17 halamanML4812CPIntan LianaBelum ada peringkat
- VFC PDFDokumen7 halamanVFC PDFtommy99Belum ada peringkat
- FP6601QDokumen8 halamanFP6601QfreddyBelum ada peringkat
- Department of Electronics Engineering: Analog Integrated Circuits Lab (ECC18201) (Electronics Main Lab-I)Dokumen20 halamanDepartment of Electronics Engineering: Analog Integrated Circuits Lab (ECC18201) (Electronics Main Lab-I)Soumya Ranjan NayakBelum ada peringkat
- Datasheet AME8815Dokumen17 halamanDatasheet AME8815ALFONZO DANIELBelum ada peringkat
- Speakers CircuitDokumen3 halamanSpeakers CircuitSantosh TalankarBelum ada peringkat
- Eecs412 Lab1Dokumen4 halamanEecs412 Lab1Josué TriveñoBelum ada peringkat
- TD 310Dokumen9 halamanTD 310Paresh PanchalBelum ada peringkat
- Lm3280 Adjustable Step-Down DC-DC Converter and 3 Ldos For RF Power ManagementDokumen26 halamanLm3280 Adjustable Step-Down DC-DC Converter and 3 Ldos For RF Power ManagementAdi PopaBelum ada peringkat
- Lm3280 Adjustable Step-Down DC-DC Converter and 3 Ldos For RF Power ManagementDokumen27 halamanLm3280 Adjustable Step-Down DC-DC Converter and 3 Ldos For RF Power ManagementEliecer MenesesBelum ada peringkat
- FAN8903 (KA3903) : Power Window Motor Control ICDokumen16 halamanFAN8903 (KA3903) : Power Window Motor Control ICAhmad YaniBelum ada peringkat
- Data Sheet: HEF4046B MSIDokumen15 halamanData Sheet: HEF4046B MSIHoangtnt NguyenBelum ada peringkat
- LD1086 Series: 1.5A Low Drop Positive Voltage Regulator Adjustable and FixedDokumen21 halamanLD1086 Series: 1.5A Low Drop Positive Voltage Regulator Adjustable and FixedNafise AshrafiBelum ada peringkat
- TLP250 (INV) : Transistor Inverter Inverters For Air Conditioner Igbt Gate Drive Power Mos Fet Gate DriveDokumen6 halamanTLP250 (INV) : Transistor Inverter Inverters For Air Conditioner Igbt Gate Drive Power Mos Fet Gate DriveChivorn TornBelum ada peringkat
- XL3525ZDokumen14 halamanXL3525ZJose HernandezBelum ada peringkat
- Phase-Locked Loop HEF4046B MSI: PinningDokumen1 halamanPhase-Locked Loop HEF4046B MSI: PinningArnoldSilvaBelum ada peringkat
- Application Note 226: Step-Up DC-DC Converter Calibration and Adjustment Using A Digital PotentiometerDokumen8 halamanApplication Note 226: Step-Up DC-DC Converter Calibration and Adjustment Using A Digital PotentiometerAlex KarimBelum ada peringkat
- Basic Phase-Locked Loop: ObjectivesDokumen7 halamanBasic Phase-Locked Loop: ObjectivesFabian Andres Burgos RojasBelum ada peringkat
- LPF Experiment AICDokumen2 halamanLPF Experiment AICAryanSinghBelum ada peringkat
- Bd9g341aefj LBDokumen30 halamanBd9g341aefj LBFantazsta White Trash.Belum ada peringkat
- Very Low Dropout 3.0 Amp Regulator With Enable: Power Management Features DescriptionDokumen10 halamanVery Low Dropout 3.0 Amp Regulator With Enable: Power Management Features DescriptionmitusharmaBelum ada peringkat
- An4050 Stevalisv012v1 Lithiumion Solar Battery Charger StmicroelectronicsDokumen17 halamanAn4050 Stevalisv012v1 Lithiumion Solar Battery Charger Stmicroelectronicsashraf.imraishBelum ada peringkat
- High Current Helogen Lamp Dimmer 1Dokumen1 halamanHigh Current Helogen Lamp Dimmer 1Nguyen Phuoc HoBelum ada peringkat
- Halogen Dimmer PDFDokumen1 halamanHalogen Dimmer PDFVictorFaucheretBelum ada peringkat
- Taller 1Dokumen5 halamanTaller 1Brayan JulianBelum ada peringkat
- Square Wave GeneratorDokumen7 halamanSquare Wave GeneratorswathiBelum ada peringkat
- AN-1348 LM3670 Evaluation Board: User's GuideDokumen10 halamanAN-1348 LM3670 Evaluation Board: User's GuideTesterBelum ada peringkat
- DatasheetDokumen12 halamanDatasheetAziz AzergBelum ada peringkat
- AN1518Dokumen6 halamanAN1518dekzzBelum ada peringkat
- V, V, K U C W/L, V I, I, G, R: Unless Given SpecificallyDokumen2 halamanV, V, K U C W/L, V I, I, G, R: Unless Given SpecificallyraghavbhatiaBelum ada peringkat
- L08 Design For Test AbilityDokumen46 halamanL08 Design For Test Abilityidk_1310Belum ada peringkat
- Vdocuments - MX EdtgdDokumen262 halamanVdocuments - MX EdtgdTwinkle Ratna100% (1)
- Astesj 0506111Dokumen7 halamanAstesj 0506111Twinkle RatnaBelum ada peringkat
- LDICA Lecture Notes by A.Mounika PDFDokumen143 halamanLDICA Lecture Notes by A.Mounika PDFTwinkle Ratna100% (1)
- Chapters 1 and 3: ARM Processor ArchitectureDokumen44 halamanChapters 1 and 3: ARM Processor ArchitectureTwinkle RatnaBelum ada peringkat
- Esd Notes A70440Dokumen136 halamanEsd Notes A70440RajeshBelum ada peringkat
- 02 ARM ArchitectureDokumen43 halaman02 ARM Architectureapi-3726520100% (1)
- Rfic Lna and Mixers PDFDokumen17 halamanRfic Lna and Mixers PDFTwinkle RatnaBelum ada peringkat
- Mimo Wireless ChannelsDokumen14 halamanMimo Wireless ChannelsTwinkle RatnaBelum ada peringkat
- ARM Architecture: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangDokumen26 halamanARM Architecture: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangTwinkle RatnaBelum ada peringkat
- Jawaharlal Nehru Technological University Anantapur: 15A04508 Digital Communications Systems LaboratoryDokumen1 halamanJawaharlal Nehru Technological University Anantapur: 15A04508 Digital Communications Systems LaboratoryTwinkle RatnaBelum ada peringkat
- In ElectronicsDokumen2 halamanIn ElectronicsTwinkle RatnaBelum ada peringkat
- Raspberry Pi DHT11 Humidity and Temperature Sensor InterfaceDokumen15 halamanRaspberry Pi DHT11 Humidity and Temperature Sensor InterfaceTwinkle RatnaBelum ada peringkat
- ARM Architecture: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangDokumen26 halamanARM Architecture: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangTwinkle RatnaBelum ada peringkat
- Impedance Matching N TransformationDokumen51 halamanImpedance Matching N TransformationShreya AdhikariBelum ada peringkat
- Razavi - RF Microelectronics - Solution - Chapter 2Dokumen25 halamanRazavi - RF Microelectronics - Solution - Chapter 2trimcao70% (20)
- 4.multiple Access Techniques and Wireless StandardDokumen43 halaman4.multiple Access Techniques and Wireless StandardTwinkle RatnaBelum ada peringkat
- Fundamentals of Electronic Circuit DesignDokumen59 halamanFundamentals of Electronic Circuit DesignKanza KhanBelum ada peringkat
- Embedded Systems DesignDokumen110 halamanEmbedded Systems Design9740177035Belum ada peringkat
- Lab 4Dokumen5 halamanLab 4Twinkle RatnaBelum ada peringkat
- Chapter 9Dokumen58 halamanChapter 9Twinkle RatnaBelum ada peringkat
- Razavi - RF Microelectronics - Solution - Chapter 2Dokumen25 halamanRazavi - RF Microelectronics - Solution - Chapter 2trimcao70% (20)
- Course Notes Advanced DSPDokumen122 halamanCourse Notes Advanced DSPAnonymous hDKqasfBelum ada peringkat
- Jpg2pdf 2.compressedDokumen2 halamanJpg2pdf 2.compressedTwinkle RatnaBelum ada peringkat
- The Register Set of Msp430x5x SeriesDokumen2 halamanThe Register Set of Msp430x5x SeriesTwinkle RatnaBelum ada peringkat
- DSP Lab With Ti c6x DSP and c6713 DSK 6.3Dokumen116 halamanDSP Lab With Ti c6x DSP and c6713 DSK 6.3Twinkle RatnaBelum ada peringkat
- Msp430 ManualDokumen6 halamanMsp430 ManualTwinkle RatnaBelum ada peringkat
- Q. List Out The Practical Applications of LED (Light Emitting Diode)Dokumen1 halamanQ. List Out The Practical Applications of LED (Light Emitting Diode)ShebinBelum ada peringkat
- Ecen 457-1-2010Dokumen19 halamanEcen 457-1-2010get2lightBelum ada peringkat
- Design With Operational Amplifiers and Analog Integrated Circuits - S. Franco PDFDokumen305 halamanDesign With Operational Amplifiers and Analog Integrated Circuits - S. Franco PDFMichel ArenivarBelum ada peringkat
- 607 Lect 5 Flipped Voltage FollowerDokumen38 halaman607 Lect 5 Flipped Voltage Followerปรัชญาภรณ์ สิงหนาทBelum ada peringkat
- 1988-JSSC-Fully Differential Operational Amplifiers With Accurate Output BalancingDokumen5 halaman1988-JSSC-Fully Differential Operational Amplifiers With Accurate Output BalancingLuật TrầnBelum ada peringkat
- Top 10 Fundamental Operational Amplifiers CircuitsDokumen7 halamanTop 10 Fundamental Operational Amplifiers CircuitsNguyễnVănTuấnBelum ada peringkat
- From Wikipedia, The Free EncyclopediaDokumen3 halamanFrom Wikipedia, The Free EncyclopediaragvshahBelum ada peringkat
- DLL BasicsDokumen41 halamanDLL BasicssrinikshithBelum ada peringkat
- Complementary Symmetry AmplifierDokumen4 halamanComplementary Symmetry AmplifierToaster97Belum ada peringkat
- ECE 202 - Linear Circuit Analysis II: Solution 1Dokumen5 halamanECE 202 - Linear Circuit Analysis II: Solution 1BoilerhelproomBelum ada peringkat
- Darlington and CascodeDokumen7 halamanDarlington and CascodeArjay Cajes0% (1)
- This Study Resource Was: EE 201 Experiment (4) Section: 052Dokumen5 halamanThis Study Resource Was: EE 201 Experiment (4) Section: 052Johnjoseph VeraBelum ada peringkat
- What Is Voltage Controlled OscillatorDokumen2 halamanWhat Is Voltage Controlled Oscillatorkurupati rakeshBelum ada peringkat
- Transistor Tuned AmplifiersDokumen2 halamanTransistor Tuned AmplifiersAwais SarfrazBelum ada peringkat
- Question Bank AECDokumen5 halamanQuestion Bank AECChandra SekharBelum ada peringkat
- Panimalar Institute of Technology Set A: Jaisakthi Educational Trust, Chennai - 600 123Dokumen4 halamanPanimalar Institute of Technology Set A: Jaisakthi Educational Trust, Chennai - 600 123DINAKARANBelum ada peringkat
- Indiv Report Cascaded AmplifierDokumen7 halamanIndiv Report Cascaded Amplifierhiruma aizenBelum ada peringkat
- User+Manual Massive Blade Series AmplifiersDokumen20 halamanUser+Manual Massive Blade Series AmplifiersKB KBBelum ada peringkat
- Microelectronics: Circuit Analysis and DesignDokumen19 halamanMicroelectronics: Circuit Analysis and DesignMei QiiBelum ada peringkat
- Cascode Amplifiers and Cascode Current MirrorsDokumen17 halamanCascode Amplifiers and Cascode Current MirrorsJohn ErhinyoBelum ada peringkat
- Valle Experiment 6Dokumen3 halamanValle Experiment 6MarkLloydValleBelum ada peringkat
- 15ee46 Opamp - LicDokumen7 halaman15ee46 Opamp - LicShankx ProductionsBelum ada peringkat
- Sem1 1213 SolutionDokumen17 halamanSem1 1213 SolutionThinesh StBelum ada peringkat
- Op-Amps As Ac Amplifers: Capacitor-Coupled Voltage FollowerDokumen7 halamanOp-Amps As Ac Amplifers: Capacitor-Coupled Voltage FollowerNisha Kotyan G RBelum ada peringkat
- Hartley Oscillator and Hartley Oscillator TheoryDokumen11 halamanHartley Oscillator and Hartley Oscillator Theorychaitanya100% (1)
- Fender 5e3 Tweed Deluxe Schematic - КопияDokumen1 halamanFender 5e3 Tweed Deluxe Schematic - КопияSerhii KarpenkoBelum ada peringkat
- Chapter 6Dokumen38 halamanChapter 6sitiBelum ada peringkat
- VWAC15 Push-Pull EL84 Guitar AmplifierDokumen5 halamanVWAC15 Push-Pull EL84 Guitar Amplifiertihomiho100% (1)
- Opamptester Elcplanet - Com - 1Dokumen2 halamanOpamptester Elcplanet - Com - 1and roidBelum ada peringkat
- Design of CMOS Fully Differential Operational Transconductance AmplifierDokumen24 halamanDesign of CMOS Fully Differential Operational Transconductance AmplifierAbhijit Kuvar100% (2)