Anda mungkin juga menyukai
- UTS Pengendalian Proses, Alza Izmuliana Eka Putri (40040118650017) a-TRKI 2018Dokumen13 halamanUTS Pengendalian Proses, Alza Izmuliana Eka Putri (40040118650017) a-TRKI 2018Mohammad ashariqodhiBelum ada peringkat
- JWBN TTGDokumen7 halamanJWBN TTGfarhan fathurrijalBelum ada peringkat
- TPP Metil Laktat Dan DapusDokumen20 halamanTPP Metil Laktat Dan DapusFifi UmmahBelum ada peringkat
- JSADokumen2 halamanJSAMegaBelum ada peringkat
- Proposal KP PusriDokumen7 halamanProposal KP PusriRobbi GasparBelum ada peringkat
- Bab II Seleksi Dan Uraian Proses FixDokumen36 halamanBab II Seleksi Dan Uraian Proses FixFitria PutriBelum ada peringkat
- Laporan Komputasi 1Dokumen19 halamanLaporan Komputasi 1khaizatul umniyyahBelum ada peringkat
- OPTIMASI PRODUKSI PARAXYLENEDokumen13 halamanOPTIMASI PRODUKSI PARAXYLENEridho mohammadBelum ada peringkat
- MENGENAL PENGENDALIAN SISTEM SELEKTIFDokumen17 halamanMENGENAL PENGENDALIAN SISTEM SELEKTIFHasna QintharaBelum ada peringkat
- KP Norliana-RabiahDokumen12 halamanKP Norliana-RabiahUncuyBelum ada peringkat
- Diagram Alir Etil AsetatDokumen1 halamanDiagram Alir Etil AsetatVirafadhilahBelum ada peringkat
- Bab Vi UtilitasDokumen30 halamanBab Vi UtilitaszaeraBelum ada peringkat
- OPTIMASI UTILITAS PABRIK GARAMDokumen43 halamanOPTIMASI UTILITAS PABRIK GARAMandre p.lBelum ada peringkat
- Eonomi TeknikDokumen4 halamanEonomi TeknikIchsan TamiogyBelum ada peringkat
- Vacuum DryersDokumen12 halamanVacuum DryersDea GitaBelum ada peringkat
- Laporan 3eDokumen101 halamanLaporan 3eFadillatul NissaBelum ada peringkat
- Kelompok 6 - Deskripsi Proses Katalis Sodium MethylateDokumen6 halamanKelompok 6 - Deskripsi Proses Katalis Sodium MethylateArdimas FauzanBelum ada peringkat
- Offset Dan BiasDokumen11 halamanOffset Dan BiasAulya AkmalaBelum ada peringkat
- Makalah HEDokumen12 halamanMakalah HERizky Fajar SodiqBelum ada peringkat
- Valve Dan Steam TrapDokumen10 halamanValve Dan Steam TrapfannyBelum ada peringkat
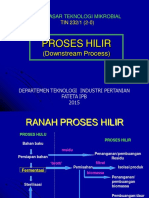
- DTM Ix. Proses Hilir 2015 PDFDokumen63 halamanDTM Ix. Proses Hilir 2015 PDFaviruyanaBelum ada peringkat
- Desain MEE ExcelDokumen6 halamanDesain MEE ExcelGalang Hanif AbdulahBelum ada peringkat
- Laporan Pengendalian SuhuDokumen17 halamanLaporan Pengendalian SuhuastriedsrBelum ada peringkat
- Makalah Utilitas SteamDokumen27 halamanMakalah Utilitas SteampratikaBelum ada peringkat
- Pembuatan Propilen OksidaDokumen23 halamanPembuatan Propilen OksidaAthia Hasna NurhanifahBelum ada peringkat
- Bab NeracaDokumen185 halamanBab NeracarevandraBelum ada peringkat
- Produksi Phenol 14.000 TonDokumen9 halamanProduksi Phenol 14.000 TonNovii HardyantoBelum ada peringkat
- Materi SO Siving Dan GrindingDokumen8 halamanMateri SO Siving Dan GrindingfelisiahBelum ada peringkat
- KELARUTAN SUHUDokumen3 halamanKELARUTAN SUHUSairahBelum ada peringkat
- OPTIMAL SUHU PENGENDALIANDokumen52 halamanOPTIMAL SUHU PENGENDALIANNur HikmaBelum ada peringkat
- Perancangan Pabrik Diaseton Alkohol Dari AsetonDokumen13 halamanPerancangan Pabrik Diaseton Alkohol Dari AsetonEl Cool0% (1)
- Prarancangan Pabrik Aseton Dari Isopropil Alkohol Dengan KapasitasDokumen14 halamanPrarancangan Pabrik Aseton Dari Isopropil Alkohol Dengan KapasitasakbarynpBelum ada peringkat
- UtilitasDokumen11 halamanUtilitasby_erdy6302Belum ada peringkat
- Pengendalian Proses DistilasiDokumen8 halamanPengendalian Proses DistilasiAditya Eka PradanaBelum ada peringkat
- PVC Plant - Kelompok 4Dokumen82 halamanPVC Plant - Kelompok 4Samuel Pangeran SilalahiBelum ada peringkat
- Lampiran PDFDokumen330 halamanLampiran PDFNurulhafizBelum ada peringkat
- Bab 1,2Dokumen34 halamanBab 1,2asih ayuBelum ada peringkat
- MEEDokumen18 halamanMEEmaulia ulfaBelum ada peringkat
- Tugas AyakanDokumen7 halamanTugas AyakanM. Prayuda WirawanBelum ada peringkat
- Bab 5 Manometer-Orifice-Ventury-PitotDokumen25 halamanBab 5 Manometer-Orifice-Ventury-PitotalivocBelum ada peringkat
- K3L Di Pabrik Pupuk UreaDokumen11 halamanK3L Di Pabrik Pupuk UreaZahroini RahmahBelum ada peringkat
- BellowsDokumen10 halamanBellowsAgee Ahmed100% (1)
- LC 1 EtanolDokumen6 halamanLC 1 EtanolBagja Malik SyakurBelum ada peringkat
- Contoh Laporan KPDokumen90 halamanContoh Laporan KPCaca ShalinaBelum ada peringkat
- Operasi Teknik Kimia IIDokumen7 halamanOperasi Teknik Kimia IIAji ForceBelum ada peringkat
- BIOETANOL DARI KULIT PISANGDokumen15 halamanBIOETANOL DARI KULIT PISANGYeyen Parida My0% (1)
- Lampiran ADokumen138 halamanLampiran AAnnisa RizqiaBelum ada peringkat
- GRATE COOLERDokumen35 halamanGRATE COOLERpuputtdwirahayuBelum ada peringkat
- OPTIMASI TRIOKSANDokumen39 halamanOPTIMASI TRIOKSANYuminten AdrBelum ada peringkat
- Bab IiDokumen3 halamanBab Iiaprilia larasatiBelum ada peringkat
- Bab IiDokumen8 halamanBab IiAlfikri RamadhanBelum ada peringkat
- Ta - Sahiba & Ellen PDFDokumen165 halamanTa - Sahiba & Ellen PDFNo NameBelum ada peringkat
- Bab 2Dokumen21 halamanBab 2ArsyadOneheartBelum ada peringkat
- Makalah Heater Kelompok 3Dokumen8 halamanMakalah Heater Kelompok 3Arya Listiadi100% (1)
- Pengendalian ProsesDokumen31 halamanPengendalian ProsesNatalyas MarampaBelum ada peringkat
- Laporan PKLDokumen13 halamanLaporan PKLRestia Eka PuspitaBelum ada peringkat
- Industri Etanol Dan Industri PropanolDokumen24 halamanIndustri Etanol Dan Industri PropanolYosy PurnamasariBelum ada peringkat
- Makalah UtilitasDokumen102 halamanMakalah UtilitasMerrison AkhzulBelum ada peringkat
- Kerangka Laporan Control LevelDokumen18 halamanKerangka Laporan Control LevelWidya AstutiBelum ada peringkat
- Dasar Teori Level Control 2Dokumen26 halamanDasar Teori Level Control 2Nur Afni M.Belum ada peringkat
- Proposal Ta IsmaaaaDokumen29 halamanProposal Ta IsmaaaanovianaBelum ada peringkat
- HALAMAN PENGESAHAN NindiaDokumen1 halamanHALAMAN PENGESAHAN NindianovianaBelum ada peringkat
- PenunjukkanDokumen1 halamanPenunjukkanLatifah HanumBelum ada peringkat
- DSC Dan DTADokumen9 halamanDSC Dan DTAMuhammad Adlan RasyidiBelum ada peringkat
- Data Hasil Praktikum TA FIX Pake BGTDokumen15 halamanData Hasil Praktikum TA FIX Pake BGTnovianaBelum ada peringkat
- Perhitungan Neraca PanasDokumen27 halamanPerhitungan Neraca PanasDanar KurniawanBelum ada peringkat
- Postest D4-TPAI-Analisa Fe SpektrofotometriDokumen1 halamanPostest D4-TPAI-Analisa Fe SpektrofotometrinovianaBelum ada peringkat
- Surat Pengantar Ambil DataDokumen1 halamanSurat Pengantar Ambil DatanovianaBelum ada peringkat
- Cover Tugas Akhir NovianaDokumen49 halamanCover Tugas Akhir NoviananovianaBelum ada peringkat
- LCTN dan LCT sejarah perusahaanDokumen3 halamanLCTN dan LCT sejarah perusahaannovianaBelum ada peringkat
- Surat Pengantar Ambil DataDokumen1 halamanSurat Pengantar Ambil DatanovianaBelum ada peringkat
- LevelDokumen7 halamanLevelnovianaBelum ada peringkat
- JawabanDokumen11 halamanJawabannovianaBelum ada peringkat
- PolietilenDokumen18 halamanPolietilenNastabiq MuhammadBelum ada peringkat
- MAKALAH BarokahDokumen25 halamanMAKALAH BarokahnovianaBelum ada peringkat
- Tehnik ESARDokumen17 halamanTehnik ESARnovianaBelum ada peringkat
- PengpanDokumen8 halamanPengpannovianaBelum ada peringkat
- OPTIMASI FILTRASI AIR LIMBAHDokumen21 halamanOPTIMASI FILTRASI AIR LIMBAHnovianaBelum ada peringkat
- Materi BaruDokumen3 halamanMateri BarunovianaBelum ada peringkat
- JawabanDokumen11 halamanJawabannovianaBelum ada peringkat
- UTS Dan JawabannyaDokumen2 halamanUTS Dan JawabannyanovianaBelum ada peringkat
- PolietilenDokumen18 halamanPolietilenNastabiq MuhammadBelum ada peringkat
- Pertanyaan Dan Jawaban KELOMPOK 4Dokumen1 halamanPertanyaan Dan Jawaban KELOMPOK 4novianaBelum ada peringkat
- Psychological Aspects of SurvivalDokumen18 halamanPsychological Aspects of SurvivalAlamBelum ada peringkat
- MatterDokumen35 halamanMatternovianaBelum ada peringkat
- Panduan Essay Competition 2017Dokumen6 halamanPanduan Essay Competition 2017novianaBelum ada peringkat
- Psychological Aspects of SurvivalDokumen18 halamanPsychological Aspects of SurvivalAlamBelum ada peringkat
- EVAKUASI TEKNIKDokumen15 halamanEVAKUASI TEKNIKnovianaBelum ada peringkat