Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Uniclass 2015 Ss - Systems Table v1.22: April 2021Dokumen3 halamanUniclass 2015 Ss - Systems Table v1.22: April 2021Nagabhushana HBelum ada peringkat
- Turnitin Originality ReportDokumen47 halamanTurnitin Originality ReportStillward Laud Mark-MillsBelum ada peringkat
- TechTrax 09 2003 ScreenReaderVersionDokumen84 halamanTechTrax 09 2003 ScreenReaderVersionMCKINNONBBelum ada peringkat
- Corrective MaintenanceDokumen12 halamanCorrective MaintenanceMohammed Nerissa100% (1)
- Environmental Education Through Art PDFDokumen27 halamanEnvironmental Education Through Art PDFCeci_SunshineBelum ada peringkat
- IRGC (2021) - Spotlight - Risk Governance and The Rise of DeepfakesDokumen4 halamanIRGC (2021) - Spotlight - Risk Governance and The Rise of DeepfakessaidBelum ada peringkat
- Arni AdvertisementDokumen2 halamanArni AdvertisementHemanthBelum ada peringkat
- User Manual For Online Super Market WebsiteDokumen3 halamanUser Manual For Online Super Market WebsiteTharunBelum ada peringkat
- DIN 3900 1984 04 Compression CouplingsDokumen3 halamanDIN 3900 1984 04 Compression Couplingsjangaswathi0% (1)
- NDP-25 Data SheetDokumen4 halamanNDP-25 Data SheetsetyaBelum ada peringkat
- PDF CatalogEngDokumen24 halamanPDF CatalogEngReal Gee MBelum ada peringkat
- TCE BE EEE RulesandRegulationsDokumen509 halamanTCE BE EEE RulesandRegulationsAplieBelum ada peringkat
- Model Variant Description Variant Code Extended Warranty Price Royal PlatinumDokumen2 halamanModel Variant Description Variant Code Extended Warranty Price Royal PlatinumRiyasBelum ada peringkat
- SE440BX-2 Motherboard: Technical Product SpecificationDokumen90 halamanSE440BX-2 Motherboard: Technical Product SpecificationEvelio MorenoBelum ada peringkat
- Compacted Graphite Iron Was First Patented at About The Same Time As Ductile Iron in The Late 1940Dokumen4 halamanCompacted Graphite Iron Was First Patented at About The Same Time As Ductile Iron in The Late 1940Agustin GerardoBelum ada peringkat
- PAC4200 Product GuideDokumen4 halamanPAC4200 Product GuideHugo Alberto Malespin SolisBelum ada peringkat
- Counters NOKLTE FL17A AlldataDokumen12 halamanCounters NOKLTE FL17A AlldataNaga Babu DesinaBelum ada peringkat
- Service Manual MIH Series Condensing Units Heat Pump: 1.5 Tons To 5 TonsDokumen30 halamanService Manual MIH Series Condensing Units Heat Pump: 1.5 Tons To 5 TonsHenry Javier RíosBelum ada peringkat
- Padma Vibhushan Dr. G. Madhavan NairDokumen7 halamanPadma Vibhushan Dr. G. Madhavan NairjishnusajiBelum ada peringkat
- 2.0 Intro To Small Basic GraphicsDokumen18 halaman2.0 Intro To Small Basic GraphicspatoturboBelum ada peringkat
- Edited - Meenakshi Kumari RaiDokumen1 halamanEdited - Meenakshi Kumari RaiThunderBird GamerBelum ada peringkat
- TOR of The Feasibility Study of Crop RecommendationDokumen6 halamanTOR of The Feasibility Study of Crop RecommendationGangadhar ChaudharyBelum ada peringkat
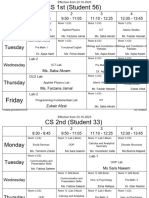
- 3b - Classwise Time Table - 2Dokumen15 halaman3b - Classwise Time Table - 2Hamza khalidBelum ada peringkat
- Facility Details On DataCenterDokumen26 halamanFacility Details On DataCenterishtiaqkhurshid470Belum ada peringkat
- Spot Cooling ResearchDokumen7 halamanSpot Cooling ResearchAkilaJosephBelum ada peringkat
- XMEye Android User ManualDokumen32 halamanXMEye Android User Manualaxelkal ck50% (2)
- Melt ManualDokumen32 halamanMelt ManualSaikat ChakrabortyBelum ada peringkat
- LAB3Dokumen5 halamanLAB3Kaishavi UmrethwalaBelum ada peringkat
- Installation, and Maintenance Manual For Gas Fired, Wall-Hung BoilersDokumen24 halamanInstallation, and Maintenance Manual For Gas Fired, Wall-Hung Boilersca3accoBelum ada peringkat
- Masonry - Block Joint Mortar 15bDokumen1 halamanMasonry - Block Joint Mortar 15bmanish260320Belum ada peringkat