Anda mungkin juga menyukai
- Fase 4 Análisis de Problemas de Balance de EnergíaDokumen7 halamanFase 4 Análisis de Problemas de Balance de EnergíaYulyPaolaGongoraGarcia50% (4)
- Primera Entrega Gestion de TransporteDokumen7 halamanPrimera Entrega Gestion de TransportePablo PamplonaBelum ada peringkat
- Primera Entrega Gestion de TransporteDokumen7 halamanPrimera Entrega Gestion de TransportePablo PamplonaBelum ada peringkat
- Previo 3. Anatomía Comparada de La Rata y HumanoDokumen10 halamanPrevio 3. Anatomía Comparada de La Rata y HumanoFelipe rodriguez islas100% (1)
- Liquidación FinancieraDokumen79 halamanLiquidación FinancieraVictorCalderonArecheBelum ada peringkat
- UNA MAQUINA FANTASTICA Vane 444Dokumen4 halamanUNA MAQUINA FANTASTICA Vane 444Pablo PamplonaBelum ada peringkat
- 7501-14 FISCA - Oscilaciones Mecánicas - Cap 1Dokumen27 halaman7501-14 FISCA - Oscilaciones Mecánicas - Cap 1Javier GarciaBelum ada peringkat
- Segunda Entrega Calificada Introduccion A La LogisticaDokumen11 halamanSegunda Entrega Calificada Introduccion A La LogisticaPablo PamplonaBelum ada peringkat
- Segunda Entrega Procesos Ind.Dokumen3 halamanSegunda Entrega Procesos Ind.Pablo PamplonaBelum ada peringkat
- Organizacion y Metodos Primera EntregaDokumen4 halamanOrganizacion y Metodos Primera EntregaPablo PamplonaBelum ada peringkat
- Tasas Marzo 2019Dokumen6 halamanTasas Marzo 2019Pablo PamplonaBelum ada peringkat
- Trabajo de Gerencia Estrategica 2019 MartDokumen16 halamanTrabajo de Gerencia Estrategica 2019 MartPablo PamplonaBelum ada peringkat
- Trabajo de Gerencia Mayo 7Dokumen24 halamanTrabajo de Gerencia Mayo 7Pablo PamplonaBelum ada peringkat
- CONSOLIDADO FINAL (Hasta El Viernes 26 de Abril A Las 11.55 PM) Ok PDFDokumen14 halamanCONSOLIDADO FINAL (Hasta El Viernes 26 de Abril A Las 11.55 PM) Ok PDFPablo PamplonaBelum ada peringkat
- Tercera Entrega Compras y Aprov.Dokumen9 halamanTercera Entrega Compras y Aprov.Pablo PamplonaBelum ada peringkat
- Trabajo Final Foro Semana 5 y 6 Desarrollo de SoftwareDokumen11 halamanTrabajo Final Foro Semana 5 y 6 Desarrollo de SoftwarePablo PamplonaBelum ada peringkat
- Gestion Integral Del Talento HumanoDokumen26 halamanGestion Integral Del Talento HumanoluisaBelum ada peringkat
- Gestión Logística Entrega Semana 5Dokumen13 halamanGestión Logística Entrega Semana 5Pablo PamplonaBelum ada peringkat
- Proyecto Grupal - La Encuadernadora S.A 2 EntregaDokumen11 halamanProyecto Grupal - La Encuadernadora S.A 2 EntregaPablo PamplonaBelum ada peringkat
- Acuerdo 671 Del 2017Dokumen5 halamanAcuerdo 671 Del 2017Pablo PamplonaBelum ada peringkat
- Foro 5 Y6 de Pensamiento AlgoritmicoDokumen5 halamanForo 5 Y6 de Pensamiento AlgoritmicoPablo PamplonaBelum ada peringkat
- Bibliografia en Normas Ieee PDFDokumen7 halamanBibliografia en Normas Ieee PDFPablo PamplonaBelum ada peringkat
- Gerencia Estrategica Proyecto Segunda Entrega 2Dokumen17 halamanGerencia Estrategica Proyecto Segunda Entrega 2maximeliza50% (4)
- Gerencia Estrategica Proyecto Segunda Entrega 2Dokumen17 halamanGerencia Estrategica Proyecto Segunda Entrega 2maximeliza50% (4)
- Johan Norberg - Cuatro Decadas Que Cambiaron El MundoDokumen114 halamanJohan Norberg - Cuatro Decadas Que Cambiaron El MundoJose Luis RivasBelum ada peringkat
- Articulos para El Trabajo de Procesos IndustrialesDokumen2 halamanArticulos para El Trabajo de Procesos IndustrialesPablo PamplonaBelum ada peringkat
- Caso La Encuadernadora AnalisisDokumen3 halamanCaso La Encuadernadora AnalisisPablo Pamplona100% (1)
- Manufactura EsbeltaDokumen226 halamanManufactura Esbeltamaestra_ingBelum ada peringkat
- Tesis58 PDFDokumen251 halamanTesis58 PDFrobin4219Belum ada peringkat
- Las Empresas y Los Costos Medio Ambientale1Dokumen55 halamanLas Empresas y Los Costos Medio Ambientale1Breyner JosephBelum ada peringkat
- Compras PDFDokumen104 halamanCompras PDFPablo PamplonaBelum ada peringkat
- 1 ProblemaDokumen3 halaman1 ProblemaJhonatan Santa Cruz ChiloBelum ada peringkat
- Crea gráficos de seguimiento Power BIDokumen5 halamanCrea gráficos de seguimiento Power BIEvelyn ReadBelum ada peringkat
- Familias lógicas TTLDokumen12 halamanFamilias lógicas TTLJuan Carlos Ticona QuispeBelum ada peringkat
- TP NDokumen3 halamanTP NLucio RodriguezBelum ada peringkat
- Marco ConceptualDokumen3 halamanMarco ConceptualJessica NoriegaBelum ada peringkat
- Taller en Casa de GeometríaDokumen4 halamanTaller en Casa de GeometríaMiguel Jimenez OsorioBelum ada peringkat
- Plan de Seguridad - LOVDokumen10 halamanPlan de Seguridad - LOVmagodaxBelum ada peringkat
- Informe de ExtintoresDokumen2 halamanInforme de Extintoresandres roman100% (1)
- Psilocibes ThemushroomsDokumen255 halamanPsilocibes Themushroomsfred sanBelum ada peringkat
- Publicaciones NTP INSHTDokumen27 halamanPublicaciones NTP INSHTju_garoBelum ada peringkat
- 02 Programa Montaje 2013 PDFDokumen11 halaman02 Programa Montaje 2013 PDFGustavo Noel Chavarria CastellanoBelum ada peringkat
- Escudos DisecDokumen39 halamanEscudos DisecTammy WashingtonBelum ada peringkat
- Simulacro de Cultura GeneralDokumen4 halamanSimulacro de Cultura GeneralKarl Franco Abt ReyesBelum ada peringkat
- INSTALACIONES ELECTRICAS UNTELS IntroduciccionDokumen62 halamanINSTALACIONES ELECTRICAS UNTELS IntroduciccionRudyJesusCapaIlizarbeBelum ada peringkat
- Cuadros de Tos en Perros PDFDokumen22 halamanCuadros de Tos en Perros PDFBrend RazoBelum ada peringkat
- Analisis Del Proseso ConstructivoDokumen9 halamanAnalisis Del Proseso ConstructivoJose de RosasBelum ada peringkat
- Aislamiento de ConductoresDokumen7 halamanAislamiento de ConductoresWENDY GRIMALDA PENAFIEL CHIPUGSIBelum ada peringkat
- Matemática Financiera Tarea 3Dokumen3 halamanMatemática Financiera Tarea 3Cristian Andres Pimentel Mancilla50% (2)
- Cuadrocomparativo 130613212527 Phpapp02Dokumen7 halamanCuadrocomparativo 130613212527 Phpapp02B F Aguirre JaquiBelum ada peringkat
- Trabajo Final Eventos Deportivos.Dokumen8 halamanTrabajo Final Eventos Deportivos.Jorge Daniel Cifuentes SepulvedaBelum ada peringkat
- Punta lógica TTLDokumen2 halamanPunta lógica TTLCristian Daniel Gonzalez RodriguezBelum ada peringkat
- Mapa Coceptual Jose Ignacio Hernandez RamosDokumen2 halamanMapa Coceptual Jose Ignacio Hernandez RamosJOSE NOTARIO TORRESBelum ada peringkat
- Contactos Mujeres Masaje Collado Villalba en MadridDokumen4 halamanContactos Mujeres Masaje Collado Villalba en MadridConocer mujeres en MadridBelum ada peringkat
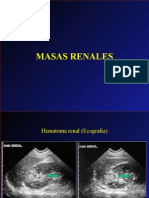
- Masas - Renales - Imagen DiagnósticaDokumen22 halamanMasas - Renales - Imagen DiagnósticaramonBelum ada peringkat
- GestiónEmpresarialProcesosDokumen29 halamanGestiónEmpresarialProcesosVíctor CarrascoBelum ada peringkat
- Proyecto de Reutilizacion de Desechos Reciclados (Papel)Dokumen31 halamanProyecto de Reutilizacion de Desechos Reciclados (Papel)richardBelum ada peringkat
- Pruebas de Bondad y AjusteDokumen4 halamanPruebas de Bondad y AjusteFernando Solís LeónBelum ada peringkat