Anda mungkin juga menyukai
- Prusa I3 Build Document by 3D Printer Czar PDFDokumen29 halamanPrusa I3 Build Document by 3D Printer Czar PDFlasersmartBelum ada peringkat
- Assembly & User Guide: By: Henry Arnold Jonathan KDokumen84 halamanAssembly & User Guide: By: Henry Arnold Jonathan KJonny MotaBelum ada peringkat
- Ender3 XZ BeltZ Build GuideDokumen12 halamanEnder3 XZ BeltZ Build GuideSeverino Campos BravoBelum ada peringkat
- Prusa Mendel Iteration 2 Documentation: Thingdoc November 16, 2011Dokumen13 halamanPrusa Mendel Iteration 2 Documentation: Thingdoc November 16, 2011Mr. KBelum ada peringkat
- Hypercube 3D Printer Using RatRig Frame KitDokumen13 halamanHypercube 3D Printer Using RatRig Frame KitceovcdkqgdheqgauwaBelum ada peringkat
- How To Build A MendelMax 1.5 3D PrinterDokumen124 halamanHow To Build A MendelMax 1.5 3D PrinterFr0styanBelum ada peringkat
- TRONXY P802EA Installation Guide v.03Dokumen29 halamanTRONXY P802EA Installation Guide v.03Jessica Ross100% (1)
- Prusa I3 Build Document by 3D Printer CzarDokumen29 halamanPrusa I3 Build Document by 3D Printer CzarlasersmartBelum ada peringkat
- Shapeoko 3 - Assembly GuideDokumen37 halamanShapeoko 3 - Assembly GuidePedro RoccaBelum ada peringkat
- Metal Plus (Model 1412) : Written By: Brook DrummDokumen30 halamanMetal Plus (Model 1412) : Written By: Brook DrummEmmanuel LeggeriBelum ada peringkat
- Manual-R12 Assembly PRUSA I3 Step by StepDokumen98 halamanManual-R12 Assembly PRUSA I3 Step by StepAndré BathistaBelum ada peringkat
- Build Guide - Exocube PrinterDokumen16 halamanBuild Guide - Exocube PrinterSammy JonesBelum ada peringkat
- CSTAR P802M Installation Guide v.04Dokumen28 halamanCSTAR P802M Installation Guide v.04Hector GarciaBelum ada peringkat
- VZ235 Assembly ManualDokumen56 halamanVZ235 Assembly ManualViorel ParaBelum ada peringkat
- Manual r19Dokumen113 halamanManual r19shrinivasrmBelum ada peringkat
- MPCNC Assembly Instructions v0.2Dokumen15 halamanMPCNC Assembly Instructions v0.2Cornelius CockburnBelum ada peringkat
- ZONESTAR P802M Installation Guide v.02Dokumen28 halamanZONESTAR P802M Installation Guide v.02Jose Miguel Cañete HidalgoBelum ada peringkat
- At-BOT ConsturctionManual EDokumen8 halamanAt-BOT ConsturctionManual ENz225Belum ada peringkat
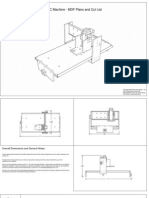
- Plantas CNC de Madeira Kit 1-1 PDFDokumen15 halamanPlantas CNC de Madeira Kit 1-1 PDFalexandrearume5392Belum ada peringkat
- Clock One Build InstructionsDokumen12 halamanClock One Build Instructionsroddick1988Belum ada peringkat
- Prusa I3 Frame Kit Build Manual PDFDokumen26 halamanPrusa I3 Frame Kit Build Manual PDFEuclides RezendeBelum ada peringkat
- Tronxy X3A Assemble Guide v.02Dokumen29 halamanTronxy X3A Assemble Guide v.02ramblicasBelum ada peringkat
- Ultimaker 2 Assembly Manual V1.1Dokumen69 halamanUltimaker 2 Assembly Manual V1.1petrkalousBelum ada peringkat
- TRONXY P802MA Installation Guide v.04Dokumen27 halamanTRONXY P802MA Installation Guide v.04pister80% (5)
- Reprap Prusa Mendel Build Manual - 2Dokumen14 halamanReprap Prusa Mendel Build Manual - 2Laxmikanth ReddyBelum ada peringkat
- Wbs Pi3 Diy Mec Rev03Dokumen20 halamanWbs Pi3 Diy Mec Rev03api-226287634Belum ada peringkat
- Assembled By: Jonathan K Instruction ManualDokumen44 halamanAssembled By: Jonathan K Instruction ManualmatteoBelum ada peringkat
- Tronxy X3 Assemble Guide V.03Dokumen30 halamanTronxy X3 Assemble Guide V.03everestoBelum ada peringkat
- Anin RobotDokumen21 halamanAnin RobotZall Boed-zilsBelum ada peringkat
- Manual - AR4 Travel TrackDokumen22 halamanManual - AR4 Travel TrackKshitijBelum ada peringkat
- Farmbot ListsDokumen25 halamanFarmbot ListsTracyBelum ada peringkat
- V-Wheels (25203-02)Dokumen33 halamanV-Wheels (25203-02)nicopoehlmannBelum ada peringkat
- Voron B - The ManualDokumen63 halamanVoron B - The ManualDaniel Leonardo AlbeBelum ada peringkat
- Ecksbot Electronics InstructionsDokumen78 halamanEcksbot Electronics InstructionsjohnBelum ada peringkat
- Build Guide - Ender 5 Exoslide Xy Motion KitDokumen6 halamanBuild Guide - Ender 5 Exoslide Xy Motion KitGreg RobertsonBelum ada peringkat
- Tronxy x1 Assembly GuideDokumen26 halamanTronxy x1 Assembly GuideВайсер Евгений100% (1)
- Dextra Assembly InstructionsDokumen16 halamanDextra Assembly InstructionsLenin MedinaBelum ada peringkat
- Assembled By: Jonathan K Instruction ManualDokumen56 halamanAssembled By: Jonathan K Instruction Manualjorje5Belum ada peringkat
- TTO Standard Flat Pack Bracket Assembly Manual EnglishDokumen48 halamanTTO Standard Flat Pack Bracket Assembly Manual EnglishKiran RagooBelum ada peringkat
- 2020B CNC Machine ManualDokumen33 halaman2020B CNC Machine ManualFelipeAndrésLondoñoGrandaBelum ada peringkat
- Prusa I3 Rework Rev1.5 - Assembly InstructionsDokumen80 halamanPrusa I3 Rework Rev1.5 - Assembly InstructionsGabor LisakBelum ada peringkat
- Pedal Opperated Grain MillDokumen38 halamanPedal Opperated Grain Millpitufito100% (1)
- Build GuideDokumen61 halamanBuild GuideAdam MichalskiBelum ada peringkat
- M-Jet ManualDokumen17 halamanM-Jet Manualh2oo2hBelum ada peringkat
- ND074组装教程文档 MANUAL ROBOTICARMDokumen29 halamanND074组装教程文档 MANUAL ROBOTICARMroboticsengineer.anttBelum ada peringkat
- CNC Machine DIY InstructionDokumen65 halamanCNC Machine DIY Instructioncxin168100% (3)
- SainSmart Genmitsu CNC Router 3018-User ManualDokumen26 halamanSainSmart Genmitsu CNC Router 3018-User ManualFernando MarcanoBelum ada peringkat
- Portabee 3D Assembly InstructionsDokumen84 halamanPortabee 3D Assembly InstructionsbillyboyclydeBelum ada peringkat
- V-Slot Corexy 3D Printer: Assembly InstructionsDokumen21 halamanV-Slot Corexy 3D Printer: Assembly InstructionsCuong Nguyen VanBelum ada peringkat
- Spitfire MK - Xiv/Xix: Two Wheel Retract SystemDokumen8 halamanSpitfire MK - Xiv/Xix: Two Wheel Retract Systemall4scaleBelum ada peringkat
- Make DIY Homework Writing Machine at HomeDokumen30 halamanMake DIY Homework Writing Machine at HomeVENOM LYBelum ada peringkat
- Getrag 256 PrepDokumen7 halamanGetrag 256 PrepInes LopesBelum ada peringkat
- Backstand EnglishDokumen7 halamanBackstand Englishdennis52100% (1)
- MyDIYCNC Desktop CNC Machine Kit Assembly InstructionsDokumen33 halamanMyDIYCNC Desktop CNC Machine Kit Assembly InstructionsKhairul Yop Azreen100% (1)
- Band Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsDari EverandBand Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsPenilaian: 5 dari 5 bintang5/5 (1)
- Chevy Differentials: How to Rebuild the 10- and 12-BoltDari EverandChevy Differentials: How to Rebuild the 10- and 12-BoltPenilaian: 5 dari 5 bintang5/5 (8)
- BLTouch Setup ManualDokumen7 halamanBLTouch Setup ManualBobbyBelum ada peringkat
- 2015/1/14 14:29:03 E:/Work/CAN-BUS Shield/CAN-BUS Shield v1.2/CAN-BUS Shield v1.2 SCH - pcb/CAN-BUS Shield v1.2.sch (Sheet: 1/2)Dokumen1 halaman2015/1/14 14:29:03 E:/Work/CAN-BUS Shield/CAN-BUS Shield v1.2/CAN-BUS Shield v1.2 SCH - pcb/CAN-BUS Shield v1.2.sch (Sheet: 1/2)Alexandru100% (1)
- IFEM AppBDokumen27 halamanIFEM AppBJitesh570Belum ada peringkat
- MatricesDokumen212 halamanMatricesMichelle Rose RoxasBelum ada peringkat
- Getting Started With The ESPlorer IDE - Rui Santos PDFDokumen18 halamanGetting Started With The ESPlorer IDE - Rui Santos PDFtedimiyiBelum ada peringkat
- MicroCube Assembly GuideDokumen22 halamanMicroCube Assembly GuideAlexandruBelum ada peringkat
- Getting Started With The ESPlorer IDE - Rui Santos PDFDokumen18 halamanGetting Started With The ESPlorer IDE - Rui Santos PDFtedimiyiBelum ada peringkat
- FRDM-KL46Z User's ManualDokumen17 halamanFRDM-KL46Z User's ManualAlexandru100% (1)
- Three-Level ANPCDokumen85 halamanThree-Level ANPCAlexandru100% (1)
- RAMPS FD SchematicDokumen9 halamanRAMPS FD SchematicAlexandru100% (2)
- Udoo ManualDokumen46 halamanUdoo ManualAlexandru100% (1)
- GDM 320240 04Dokumen18 halamanGDM 320240 04AlexandruBelum ada peringkat
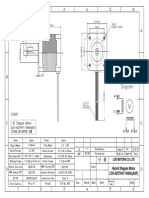
- Ldo 42STH47 1684aDokumen1 halamanLdo 42STH47 1684aAlexandruBelum ada peringkat
- The Logic of Collective ActionDokumen23 halamanThe Logic of Collective ActionAlexandruBelum ada peringkat
- Udoo Pinout DiagramDokumen1 halamanUdoo Pinout DiagramAlexandruBelum ada peringkat
- Pism Report Nato EngDokumen132 halamanPism Report Nato EngAlexandruBelum ada peringkat
- Strom 2006Dokumen15 halamanStrom 2006AlexandruBelum ada peringkat
- Instructions Us Spykee VoxDokumen25 halamanInstructions Us Spykee VoxAlexandru0% (1)
- Three-Level ANPCDokumen85 halamanThree-Level ANPCAlexandru100% (1)
- HB en 2006 - NATO PDFDokumen405 halamanHB en 2006 - NATO PDFsetiawanaji407Belum ada peringkat
- Heat Sink Selection: Thermal Management of Electronics San José State University Mechanical Engineering DepartmentDokumen19 halamanHeat Sink Selection: Thermal Management of Electronics San José State University Mechanical Engineering DepartmentKishore BhatBelum ada peringkat
- Heat SinkDokumen18 halamanHeat SinkAlexandruBelum ada peringkat
- HB en 2006 - NATO PDFDokumen405 halamanHB en 2006 - NATO PDFsetiawanaji407Belum ada peringkat
- Dir 635Dokumen93 halamanDir 635AlexandruBelum ada peringkat
- IranDokumen241 halamanIranAlexandru100% (2)
- Heating Effect of Electric Current: Electricity IDokumen7 halamanHeating Effect of Electric Current: Electricity IAlexandruBelum ada peringkat
- United States Patent: US 7,574,795 B2 Aug. 18,2009Dokumen17 halamanUnited States Patent: US 7,574,795 B2 Aug. 18,2009amd mhmBelum ada peringkat
- Anet A8 ManualDokumen73 halamanAnet A8 ManualHenry Pablo50% (2)
- Koyo Ceramic Catb1013exDokumen17 halamanKoyo Ceramic Catb1013exJose DonaireBelum ada peringkat
- Catalogue Clevite PDFDokumen969 halamanCatalogue Clevite PDFSARL MEHMELBelum ada peringkat
- Rolling Bearings For Industrial Machinery Part D Industry SolutionsDokumen87 halamanRolling Bearings For Industrial Machinery Part D Industry SolutionsInamMuradBelum ada peringkat
- Oil Analysis Condition MonitoringDokumen24 halamanOil Analysis Condition MonitoringMarc Samuel Vromans100% (5)
- MB TZ3Dokumen60 halamanMB TZ3Anonymous 5XUrk2100% (1)
- Turbine Lube Oil SystemDokumen15 halamanTurbine Lube Oil SystemTushar Panchal100% (1)
- Product Information: Valvoline Multi-Purpose GreasesDokumen1 halamanProduct Information: Valvoline Multi-Purpose GreasesAmir DaneshBelum ada peringkat
- Binder 1Dokumen30 halamanBinder 1Manoj KumarBelum ada peringkat
- Mechanical Interview QuestionsDokumen24 halamanMechanical Interview QuestionsSurya Kiran75% (4)
- Conveyor Gearbox Failure Analysis #Dokumen6 halamanConveyor Gearbox Failure Analysis #Satyam MadameBelum ada peringkat
- Turbine Operation Manual PDFDokumen416 halamanTurbine Operation Manual PDFMuhammad Hashir100% (1)
- Technical Specification WWD1Dokumen18 halamanTechnical Specification WWD1Roberto RBelum ada peringkat
- NSK For Space EnviromentDokumen72 halamanNSK For Space EnviromentdomingocattoniBelum ada peringkat
- ATR72 Wheels Training April 2016 Air IndiaDokumen86 halamanATR72 Wheels Training April 2016 Air IndiaPravinFating100% (1)
- Bearing Shaft Fits and Tolerances 1Dokumen9 halamanBearing Shaft Fits and Tolerances 1Arun KumarBelum ada peringkat
- Maintenance Procedure ApsolDokumen12 halamanMaintenance Procedure ApsolloayBelum ada peringkat
- Aurora 3800 Series PumpsDokumen8 halamanAurora 3800 Series PumpsJayakrishnan Radhakrishnan100% (1)
- TobeFR4 Pot Bearings 24022011 PDFDokumen12 halamanTobeFR4 Pot Bearings 24022011 PDFprashanth c.nBelum ada peringkat
- Slewing Rings Bearing Lubrication and MaintenanceDokumen8 halamanSlewing Rings Bearing Lubrication and Maintenancedaniel rezmiresBelum ada peringkat
- Mil L 0046010eDokumen21 halamanMil L 0046010eGoogle User100% (1)
- Combo PDFDokumen209 halamanCombo PDFBasem Al-HajBelum ada peringkat
- Cat 793c Manual ServicioDokumen232 halamanCat 793c Manual ServicioFzl2100% (13)
- MachineDokumen18 halamanMachineLouie Ludeña VillegasBelum ada peringkat
- Automatic Tyre Pressure Inflation System For AutomobileDokumen6 halamanAutomatic Tyre Pressure Inflation System For Automobileshreesha ikurBelum ada peringkat
- 560 000 TS M 130 - 6Dokumen77 halaman560 000 TS M 130 - 6Luis Valdez espinozaBelum ada peringkat
- CAT 938G LoaderDokumen25 halamanCAT 938G LoaderMohammed Ali Mahadik60% (5)
- Rust Prevention For Parts in Shipment PDFDokumen2 halamanRust Prevention For Parts in Shipment PDFAnonymous alQXB11EgQBelum ada peringkat
- Matunga - Technical Specifications-Pages-29-52Dokumen24 halamanMatunga - Technical Specifications-Pages-29-52JITENDRA SHRIVASTAVABelum ada peringkat