Anda mungkin juga menyukai
- Bipolar Pulse Width Modulation Inverter: Xin Chen Ryan HaradaDokumen35 halamanBipolar Pulse Width Modulation Inverter: Xin Chen Ryan Haradavaralakshmi vanapalliBelum ada peringkat
- ReportDokumen26 halamanReportAmaal KhaledBelum ada peringkat
- Micro Controller Single Phase RectifireDokumen23 halamanMicro Controller Single Phase RectifireMark ClarkeBelum ada peringkat
- 6305ELE 2021 - Power El & Drives - S1Dokumen16 halaman6305ELE 2021 - Power El & Drives - S1M Moiz IlyasBelum ada peringkat
- DC-AC Inverter CircuitDokumen29 halamanDC-AC Inverter CircuitczeapsekBelum ada peringkat
- DC-AC Inverter CircuitDokumen29 halamanDC-AC Inverter CircuitIlse Mariel Rodríguez SandovalBelum ada peringkat
- MAN7Dokumen39 halamanMAN7anup kumarBelum ada peringkat
- Milan TomicDokumen79 halamanMilan TomicmaryansekBelum ada peringkat
- $ Power Supply DesignDokumen164 halaman$ Power Supply Designquangntn88Belum ada peringkat
- Buck Converter Experiment ReportDokumen12 halamanBuck Converter Experiment Reportjeries shehadehBelum ada peringkat
- DSP Based Electric Drives Laboratory: User ManualDokumen102 halamanDSP Based Electric Drives Laboratory: User ManualSamarpan TimilaiBelum ada peringkat
- Dynamic Voltage Regulator-2Dokumen56 halamanDynamic Voltage Regulator-2Syed Murtuza BuqaryBelum ada peringkat
- DC/DC Boost Converter Report: Do Nguyen NghiaDokumen34 halamanDC/DC Boost Converter Report: Do Nguyen NghiaNguyên NghĩaBelum ada peringkat
- Generate Power While Exercising with an Electric BicycleDokumen19 halamanGenerate Power While Exercising with an Electric Bicyclenayak_bibekumarBelum ada peringkat
- MainAn Optimizing Compiler For Floating Point OperationsDokumen43 halamanMainAn Optimizing Compiler For Floating Point OperationsPraful GuptaBelum ada peringkat
- Power Oroject Z&FDokumen24 halamanPower Oroject Z&FzigijuBelum ada peringkat
- Project ReportDokumen14 halamanProject ReportMark AggreyBelum ada peringkat
- Regulated Power SupplyDokumen12 halamanRegulated Power SupplySachie1912Belum ada peringkat
- Course Material On Switched Mode Power ConversionDokumen10 halamanCourse Material On Switched Mode Power ConversionThriloknath pallaBelum ada peringkat
- Campostrini Francesco TesiDokumen100 halamanCampostrini Francesco TesiLankeshBelum ada peringkat
- DC Breaker ABB PDFDokumen60 halamanDC Breaker ABB PDFVivek KumawatBelum ada peringkat
- DC Shunt MotorDokumen14 halamanDC Shunt MotorJohn kamandaBelum ada peringkat
- Digital Control in Power ElectronicsDokumen159 halamanDigital Control in Power Electronicsthietdaucong100% (2)
- Pqvo3Sd Short Duration Voltage Variations: Issued: 6/2005 Version: A/08.07.2005Dokumen24 halamanPqvo3Sd Short Duration Voltage Variations: Issued: 6/2005 Version: A/08.07.2005vdesle7Belum ada peringkat
- General Information & FeaturesDokumen17 halamanGeneral Information & FeaturesChristian BedoyaBelum ada peringkat
- PowerFactory TechRef - Grid-Forming - ConverterDokumen12 halamanPowerFactory TechRef - Grid-Forming - ConverterАлександр100% (1)
- Integrator Information V2.8.2-131-Gf324cd6e2, 2022-05-28Dokumen17 halamanIntegrator Information V2.8.2-131-Gf324cd6e2, 2022-05-28Juan Carlos LesmasBelum ada peringkat
- Switch Capacitr DC-DC ConverterDokumen141 halamanSwitch Capacitr DC-DC ConverterBahram AshrafiBelum ada peringkat
- Summer internship report on panel manufacturingDokumen14 halamanSummer internship report on panel manufacturinglive life with PeggyBelum ada peringkat
- Motor ControlsDokumen40 halamanMotor ControlsArlone ManaladBelum ada peringkat
- Fully Integrated On-Chip Switched Capacitor DC-DC ConvertersDokumen136 halamanFully Integrated On-Chip Switched Capacitor DC-DC ConvertersasamarahBelum ada peringkat
- SMPC VRamnarayananDokumen460 halamanSMPC VRamnarayananjangalalanarasimha021Belum ada peringkat
- Electronics Project FinalDokumen45 halamanElectronics Project Finalfiraol temesgenBelum ada peringkat
- Power Electronics Lab Speed Control of DC Motor Using Pulse Width Modulation Group MembersDokumen10 halamanPower Electronics Lab Speed Control of DC Motor Using Pulse Width Modulation Group MembersFaisal NiaziBelum ada peringkat
- An Energy Metering System using ATmega32 MicrocontrollerDokumen8 halamanAn Energy Metering System using ATmega32 Microcontrollerthuthukani zamokuhle mthimkhuluBelum ada peringkat
- Integrator Information V2.8.0-98-Gae2e6bd, 2020-11-01 PDFDokumen17 halamanIntegrator Information V2.8.0-98-Gae2e6bd, 2020-11-01 PDFluisBelum ada peringkat
- FBW FBW4820RevADokumen16 halamanFBW FBW4820RevAinfoBelum ada peringkat
- 400 220kv Substation Traning Report DuraDokumen101 halaman400 220kv Substation Traning Report DuraSumanto HembramBelum ada peringkat
- 3 Phase Ac Motor Control With VHZ Speed Closed Loop Using The 56f800eDokumen36 halaman3 Phase Ac Motor Control With VHZ Speed Closed Loop Using The 56f800ePrabhu RajBelum ada peringkat
- ReportDokumen15 halamanReportGavaine MattisonBelum ada peringkat
- Detecting Power Grid Synchronisation Failure Thesis Report DissertationDokumen60 halamanDetecting Power Grid Synchronisation Failure Thesis Report DissertationKapil PadlakBelum ada peringkat
- StatcomDokumen16 halamanStatcomksg9731100% (1)
- Haematokrit 210Dokumen34 halamanHaematokrit 210M Ziko Alamanda100% (3)
- ECE 445 - Senior Design Design Review: Suiping Wu Isaac WongDokumen17 halamanECE 445 - Senior Design Design Review: Suiping Wu Isaac WongErikBelum ada peringkat
- Zeiad TP048126 Aics ReportDokumen26 halamanZeiad TP048126 Aics ReportMomen KamalBelum ada peringkat
- LinuxCNC IntegratorDokumen17 halamanLinuxCNC IntegratorrodrigodelacalperezBelum ada peringkat
- PSB Final ReportDokumen32 halamanPSB Final Reportaamir.faiazBelum ada peringkat
- Modelling and Simulation of Closed Loop BLDC Motor ControlDokumen30 halamanModelling and Simulation of Closed Loop BLDC Motor Controlaarya5Belum ada peringkat
- Power Fin RepDokumen52 halamanPower Fin RepYasser SassiBelum ada peringkat
- ¡ Digital Control in Power Electronics¡ by Simone Buso and Paolo MattavelliDokumen159 halaman¡ Digital Control in Power Electronics¡ by Simone Buso and Paolo MattavellidevchandarBelum ada peringkat
- Monitoring AC Voltage and Frequency with Over/Under Voltage ProtectionDokumen61 halamanMonitoring AC Voltage and Frequency with Over/Under Voltage ProtectionFacts fidaBelum ada peringkat
- MemoriaDokumen67 halamanMemoriaSagorBelum ada peringkat
- L 6599 DDokumen36 halamanL 6599 DVidal VelasquezBelum ada peringkat
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDari EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetPenilaian: 2 dari 5 bintang2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDari EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBelum ada peringkat
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachDari EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachBelum ada peringkat
- Practical Switching Power Supply DesignDari EverandPractical Switching Power Supply DesignPenilaian: 2 dari 5 bintang2/5 (1)
- Introduction to Power System ProtectionDari EverandIntroduction to Power System ProtectionPenilaian: 5 dari 5 bintang5/5 (1)
- Vehical Control by Alcohol Detector: BY: DHRUV AGARWAL (12-EEU-014) HEEVAN SHER (12-EEU-020)Dokumen24 halamanVehical Control by Alcohol Detector: BY: DHRUV AGARWAL (12-EEU-014) HEEVAN SHER (12-EEU-020)Anonymous ytZsBOVBelum ada peringkat
- BowTie 2Dokumen8 halamanBowTie 2Rezmerita FlorinBelum ada peringkat
- Magnetostriction, Barkhausen Noise and Magnetization Processes in Non-Electrical Steels PDFDokumen9 halamanMagnetostriction, Barkhausen Noise and Magnetization Processes in Non-Electrical Steels PDFallanromarioBelum ada peringkat
- Xxpol 1710 2170Mhz×2 Dual-Beam 33° 20dbi 2° 10° Manual or by Optional Replaceable Rcu (Remote Control Unit) Antenna Electrical SpecificationsDokumen1 halamanXxpol 1710 2170Mhz×2 Dual-Beam 33° 20dbi 2° 10° Manual or by Optional Replaceable Rcu (Remote Control Unit) Antenna Electrical Specificationspulok123Belum ada peringkat
- Dual 3+1 PWM Controller With Current Monitor For Imvp-7/Vr12™ CpusDokumen36 halamanDual 3+1 PWM Controller With Current Monitor For Imvp-7/Vr12™ CpusPitarsaBelum ada peringkat
- List of IEC StandardDokumen5 halamanList of IEC Standardtrantienhung227Belum ada peringkat
- AC 800PEC Control SystemDokumen37 halamanAC 800PEC Control Systemn_navaneethBelum ada peringkat
- Be Winter 2018Dokumen2 halamanBe Winter 2018vikram patilBelum ada peringkat
- Power Modules: B48-2T, B48-2 SeriesDokumen5 halamanPower Modules: B48-2T, B48-2 SeriesPaul Luya EspinozaBelum ada peringkat
- Ti 093 TenDokumen4 halamanTi 093 TenThanh Vu ChiBelum ada peringkat
- Research Proposal (Plaza)Dokumen10 halamanResearch Proposal (Plaza)Edmarjan ConcepcionBelum ada peringkat
- Ass 2022Dokumen4 halamanAss 2022gogajauharBelum ada peringkat
- Sensorless FOC of ACIDokumen43 halamanSensorless FOC of ACIdimitaringBelum ada peringkat
- Report - Guide To Microwave Project Installation Materials Survey-20090728-B-1.3Dokumen16 halamanReport - Guide To Microwave Project Installation Materials Survey-20090728-B-1.3Julio Jose Villa GuerreroBelum ada peringkat
- Contrax Joints Provide Fast, Easy Medium Voltage ConnectionsDokumen4 halamanContrax Joints Provide Fast, Easy Medium Voltage ConnectionsAmit BhatiaBelum ada peringkat
- Orders of Magnitude (Magnetic Field)Dokumen3 halamanOrders of Magnitude (Magnetic Field)blerb795Belum ada peringkat
- Government of Kerala public works department schedule of rates for electrical materials 2008Dokumen106 halamanGovernment of Kerala public works department schedule of rates for electrical materials 2008Kamal ShaikBelum ada peringkat
- Iso 15257Dokumen34 halamanIso 15257Danilo AmendolaBelum ada peringkat
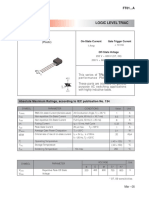
- LOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSDokumen4 halamanLOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSAnatoly WolkoffBelum ada peringkat
- Group 3 Section (H) (Lab Report 2)Dokumen8 halamanGroup 3 Section (H) (Lab Report 2)Shoaib KhanBelum ada peringkat
- BBJ-Series explosion-proof audible and visual alarm (IIC、tD)Dokumen1 halamanBBJ-Series explosion-proof audible and visual alarm (IIC、tD)Sigit RiyadiBelum ada peringkat
- Aircraft Radio Communications ReceiverDokumen2 halamanAircraft Radio Communications Receiverdreyes3773Belum ada peringkat
- Dokumen - Tips - Novar Controller Brochure PDFDokumen8 halamanDokumen - Tips - Novar Controller Brochure PDFArma ArzuBelum ada peringkat
- I56 4446 000 - EN 6500RSE Installation Manual PDFDokumen30 halamanI56 4446 000 - EN 6500RSE Installation Manual PDFAakash ChavanBelum ada peringkat
- Growatt 1500-US/2000-US/3000-US TL technology datasheetDokumen2 halamanGrowatt 1500-US/2000-US/3000-US TL technology datasheetJonathan León100% (1)
- Reference Manual Allen Bradley Power Flex AC DriveDokumen300 halamanReference Manual Allen Bradley Power Flex AC DriveDedy WirawanBelum ada peringkat
- Chapter 4 Exercise and H.W. AssignmentDokumen76 halamanChapter 4 Exercise and H.W. AssignmentMuhammad HasSanBelum ada peringkat
- Earth Leakage Protection: ContentsDokumen5 halamanEarth Leakage Protection: ContentseajBelum ada peringkat
- Electrical Tools and Equipment GuideDokumen35 halamanElectrical Tools and Equipment GuideLogan LeeBelum ada peringkat
- Typical motor full load amps guideDokumen1 halamanTypical motor full load amps guidejituplanojrBelum ada peringkat