Anda mungkin juga menyukai
- Fuentes de AlimentaciónDokumen34 halamanFuentes de AlimentaciónPao CaceresBelum ada peringkat
- Ieee Examen Pregunta 1Dokumen8 halamanIeee Examen Pregunta 1Pablo TonatoBelum ada peringkat
- Electris Part Max-X55bDokumen14 halamanElectris Part Max-X55bGustavo ChavezBelum ada peringkat
- Para Aportar o Consultar Una Fallas Resueltas Entre AhttpDokumen52 halamanPara Aportar o Consultar Una Fallas Resueltas Entre Ahttpindavi100% (1)
- Informe de Laboratorio #3 Electronica Analogica I PDFDokumen4 halamanInforme de Laboratorio #3 Electronica Analogica I PDFDiego Alejandro Gonzalez QuirozBelum ada peringkat
- Red de Dos PuertosDokumen12 halamanRed de Dos PuertosArturo Sanchez MendozaBelum ada peringkat
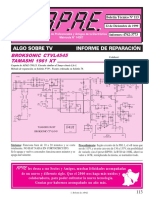
- Broksonic CTVL 4545 - Fuente GenericaDokumen5 halamanBroksonic CTVL 4545 - Fuente GenericaSergio Daniel BarretoBelum ada peringkat
- Lab 3 - Rectificadores y Fuente DC No ReguladaDokumen7 halamanLab 3 - Rectificadores y Fuente DC No ReguladaTobimainlayton MisattBelum ada peringkat
- Encendido Del Motor Con BluetoothDokumen16 halamanEncendido Del Motor Con BluetoothAlexander100% (1)
- Arquitectura Del ComputadorDokumen11 halamanArquitectura Del ComputadorGrego RojasBelum ada peringkat
- Ejercicios PDFDokumen72 halamanEjercicios PDFByron MonterrozaBelum ada peringkat
- Ad 595 Datasheet TraducidoDokumen9 halamanAd 595 Datasheet TraducidojonathansataBelum ada peringkat
- Practica 1Dokumen24 halamanPractica 1Sarah HoranBelum ada peringkat
- Electronica Aplicada IEEEDokumen6 halamanElectronica Aplicada IEEEJulian RoaBelum ada peringkat
- ExamenDokumen2 halamanExamenCristobal OchoaBelum ada peringkat
- TP Nº7 - Arranque Estrella Triángulo Con ContactoresDokumen5 halamanTP Nº7 - Arranque Estrella Triángulo Con ContactoresMarcos QuirogaBelum ada peringkat
- Descalcificador ElectrónicoDokumen6 halamanDescalcificador ElectrónicoPedro Prieto Trujillo100% (2)
- Guia 3 Semiconductores y DiodosDokumen13 halamanGuia 3 Semiconductores y Diodospot atoBelum ada peringkat
- Dispositivos Electronicos Floyd 8edDokumen1.010 halamanDispositivos Electronicos Floyd 8edSantiago100% (2)
- Tatiana Hernandez Esteban BarreraDokumen19 halamanTatiana Hernandez Esteban BarreraanyecriBelum ada peringkat
- Transistor IgbtDokumen23 halamanTransistor IgbtOdair DimasBelum ada peringkat
- Alarma Antirrobo Utilizando LáserDokumen8 halamanAlarma Antirrobo Utilizando LáserAnthony EspinozaBelum ada peringkat
- ModificadoresDokumen3 halamanModificadoreschino2229Belum ada peringkat
- Compuertas Lógicas Con RelésDokumen6 halamanCompuertas Lógicas Con RelésCarlos David Ordaz JuárezBelum ada peringkat
- Fuente DC 170V ReguladaDokumen9 halamanFuente DC 170V ReguladaCristian Alexis Angarita RodríguezBelum ada peringkat
- Unidad 8 Tolerancia A FallasDokumen4 halamanUnidad 8 Tolerancia A FallasHomero Peralta PintoBelum ada peringkat
- Amplificadores MultietapaDokumen6 halamanAmplificadores MultietapaDaniel SanchezBelum ada peringkat
- Electricidad para Radiaficionados PDFDokumen40 halamanElectricidad para Radiaficionados PDFAndres Videla FloresBelum ada peringkat
- Protector para Compresores Monofásicos 220V - Genteca C.ADokumen3 halamanProtector para Compresores Monofásicos 220V - Genteca C.AjoseBelum ada peringkat
- 08 - Funciones LogicasDokumen66 halaman08 - Funciones LogicasVicente ParraBelum ada peringkat