Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Electronics Workbench Lab 6Dokumen47 halamanElectronics Workbench Lab 6Imran ShaukatBelum ada peringkat
- Sila Rehmi PDFDokumen31 halamanSila Rehmi PDFImran ShaukatBelum ada peringkat
- Nsu Prospectus 2024Dokumen75 halamanNsu Prospectus 2024Imran ShaukatBelum ada peringkat
- Electronic Workbench.Dokumen1 halamanElectronic Workbench.Imran ShaukatBelum ada peringkat
- Electronics Workbench Lab 6Dokumen3 halamanElectronics Workbench Lab 6Imran Shaukat100% (1)
- Analog InputDokumen2 halamanAnalog InputImran ShaukatBelum ada peringkat
- What Is The Meaning of Scaling in PLC?Dokumen1 halamanWhat Is The Meaning of Scaling in PLC?Imran ShaukatBelum ada peringkat
- SS Instruction Sheet-English-20060505 PDFDokumen2 halamanSS Instruction Sheet-English-20060505 PDFstgpereiraBelum ada peringkat
- Wiring of Voltage/currentDokumen2 halamanWiring of Voltage/currentImran ShaukatBelum ada peringkat
- University of Engineering and Technology Taxila Examinations BranchDokumen1 halamanUniversity of Engineering and Technology Taxila Examinations BranchImran ShaukatBelum ada peringkat
- Analog Input and OutputDokumen2 halamanAnalog Input and OutputImran ShaukatBelum ada peringkat
- CH 12 Handling Data 1Dokumen43 halamanCH 12 Handling Data 1Imran ShaukatBelum ada peringkat
- Programmable Logic Control Trainer IT-1200SDokumen34 halamanProgrammable Logic Control Trainer IT-1200SImran ShaukatBelum ada peringkat
- Module # 1 Introduction To Control SystemDokumen7 halamanModule # 1 Introduction To Control SystemImran ShaukatBelum ada peringkat
- B.Sc. Electronics Engineering Autumn 2014: Engr. Kamran JavedDokumen24 halamanB.Sc. Electronics Engineering Autumn 2014: Engr. Kamran JavedImran ShaukatBelum ada peringkat
- Programable Logic ControlDokumen17 halamanProgramable Logic ControlImran ShaukatBelum ada peringkat
- B.Sc. Electronics Engineering Fall 2014: Engr. Kamran JavedDokumen11 halamanB.Sc. Electronics Engineering Fall 2014: Engr. Kamran JavedImran ShaukatBelum ada peringkat
- Entery Test Mphil Sample PapersDokumen2 halamanEntery Test Mphil Sample PapersImran ShaukatBelum ada peringkat
- Applying Image Processing Techniques To Motivate Students in Linear Algebra ClassesDokumen8 halamanApplying Image Processing Techniques To Motivate Students in Linear Algebra ClassesImran ShaukatBelum ada peringkat
- Sample PLC Exam ProblemsDokumen5 halamanSample PLC Exam Problemsknbaluvlsi90% (10)
- University of Engineering and Technology TAXILA 47050 Sub-Campus ChakwalDokumen2 halamanUniversity of Engineering and Technology TAXILA 47050 Sub-Campus ChakwalImran ShaukatBelum ada peringkat
- A Gateway To Industrial AutomationDokumen13 halamanA Gateway To Industrial AutomationImran ShaukatBelum ada peringkat
- Practice ProblemsDokumen14 halamanPractice ProblemsImran Shaukat100% (1)
- Lab 9Dokumen8 halamanLab 9Imran ShaukatBelum ada peringkat
- DVP-PLC Application Manual: 【Programming 】Dokumen4 halamanDVP-PLC Application Manual: 【Programming 】Imran ShaukatBelum ada peringkat
- PLC Programming BasicsDokumen6 halamanPLC Programming BasicsImran ShaukatBelum ada peringkat
- USB Interfaced Ultra-High Speed Low Cost Universal Device ProgrammerDokumen2 halamanUSB Interfaced Ultra-High Speed Low Cost Universal Device ProgrammerImran ShaukatBelum ada peringkat
- 8051 Interfacing LCD 16x2Dokumen14 halaman8051 Interfacing LCD 16x2Imran Shaukat100% (3)
- Products 4936 MB 650 ML BrochureDokumen2 halamanProducts 4936 MB 650 ML BrochureImran ShaukatBelum ada peringkat
- Products3329CM284 S12Dokumen2 halamanProducts3329CM284 S12Imran ShaukatBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Effect of Heavy Equipment Management On The PeDokumen8 halamanThe Effect of Heavy Equipment Management On The PeGary NashBelum ada peringkat
- CyberAces Module1-Windows 6 PoliciesAndCredStorageDokumen18 halamanCyberAces Module1-Windows 6 PoliciesAndCredStorageAbiodun AmusatBelum ada peringkat
- PD Smart PDFDokumen2 halamanPD Smart PDFAriel Leandro Toro MuñozBelum ada peringkat
- How To Setup Mobility Extension On 2n OfficerouteDokumen14 halamanHow To Setup Mobility Extension On 2n Officeroutegnatagbi8696Belum ada peringkat
- 2 PagesDokumen3 halaman2 PagesJohn Manuel BautistaBelum ada peringkat
- Bike Engine: Ricardo 2/4sight - 2 and 4 Stroke EngineDokumen6 halamanBike Engine: Ricardo 2/4sight - 2 and 4 Stroke Enginecloudsakthivel89% (9)
- Sustaining An Ict Project For Social ChangeDokumen6 halamanSustaining An Ict Project For Social Changechristianbunao1907Belum ada peringkat
- Hierarchy in PDMS - World, Site, ZoneDokumen6 halamanHierarchy in PDMS - World, Site, Zones_baishyaBelum ada peringkat
- Informe Practica II Lab de MedidasDokumen5 halamanInforme Practica II Lab de MedidasMaria Isabel Martinez NorenaBelum ada peringkat
- Xirrus Enterprise WiFiDokumen2 halamanXirrus Enterprise WiFiLuis MendozaBelum ada peringkat
- Paccar MX 11 ENGINE Operators Manual 2018Dokumen104 halamanPaccar MX 11 ENGINE Operators Manual 2018ddi1150% (2)
- Datasheet - HK S29al016j70tfi020 6599589Dokumen58 halamanDatasheet - HK S29al016j70tfi020 6599589SAABBelum ada peringkat
- Manual Sharp CMS-R600XDokumen64 halamanManual Sharp CMS-R600Xjca16100% (1)
- Lenovo Yoga 710-14ISK LA-D471P r2.0Dokumen53 halamanLenovo Yoga 710-14ISK LA-D471P r2.0Julio MinaBelum ada peringkat
- Industrial Wiring and Design ProjectDokumen3 halamanIndustrial Wiring and Design ProjectJibril JundiBelum ada peringkat
- InfoSys Interview Questions For APIDokumen3 halamanInfoSys Interview Questions For APIVijjuBelum ada peringkat
- Core Task 2 - Ayushi BoliaDokumen3 halamanCore Task 2 - Ayushi BoliaAyushi BoliaBelum ada peringkat
- Summer ProjectDokumen54 halamanSummer ProjectVikram MauryaBelum ada peringkat
- Deutsche Bank - Cloud Computing. Clear Skies AheadDokumen20 halamanDeutsche Bank - Cloud Computing. Clear Skies AheadkentselveBelum ada peringkat
- Sihao Huang Resume 1Dokumen2 halamanSihao Huang Resume 1api-528311148Belum ada peringkat
- Amdocs Interview QuestionsDokumen3 halamanAmdocs Interview QuestionsOmkar J Goulay0% (1)
- Section: NW2060CVB-IV (M) General ArrangementDokumen1 halamanSection: NW2060CVB-IV (M) General Arrangementdarko1969Belum ada peringkat
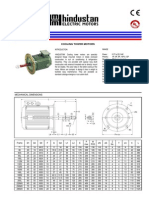
- Cooling Tower MotorDokumen2 halamanCooling Tower MotorDipendraTomarBelum ada peringkat
- ISO 14971 ChangedDokumen1 halamanISO 14971 ChangedSen MingBelum ada peringkat
- 4 Administration PDFDokumen125 halaman4 Administration PDFBojan BanjacBelum ada peringkat
- 3DReshaper LeicaPresentation2014Dokumen12 halaman3DReshaper LeicaPresentation2014cristicomanBelum ada peringkat
- 08 - IP SubnettingDokumen20 halaman08 - IP Subnettingkndnew guadeBelum ada peringkat
- MDCS en 2022Dokumen8 halamanMDCS en 2022ZaharBelum ada peringkat
- IEM PI 0100 - Competency Model For PI Oral InterviewDokumen6 halamanIEM PI 0100 - Competency Model For PI Oral InterviewJani AceBelum ada peringkat
- Indicative ProfileDokumen5 halamanIndicative ProfileYashveer TakooryBelum ada peringkat