Anda mungkin juga menyukai
- Cálculo de Dimensionamiento de Los MoldesDokumen28 halamanCálculo de Dimensionamiento de Los MoldesDavid RomeroBelum ada peringkat
- Memoria TFG TaladrodeColumnaDokumen88 halamanMemoria TFG TaladrodeColumnaLuz marina Condori mamaniBelum ada peringkat
- Roberto Revilla: COMPUTADOR (Cpu) COMPATIBLE INTEL CORE I5-12400 (Doceava Generacion)Dokumen2 halamanRoberto Revilla: COMPUTADOR (Cpu) COMPATIBLE INTEL CORE I5-12400 (Doceava Generacion)Christopher RevillaBelum ada peringkat
- Circuitos Con Diodos.-Diodos ZenerDokumen31 halamanCircuitos Con Diodos.-Diodos ZenerDario GalarzaBelum ada peringkat
- Manual Mantenimiento Completo - Tractor PDFDokumen66 halamanManual Mantenimiento Completo - Tractor PDFcristofer osvalo peñaloza arevalo0% (1)
- Monografia TerminadaDokumen414 halamanMonografia Terminadamaes1975Belum ada peringkat
- Instructivo de Cortacircuito FusiblesDokumen4 halamanInstructivo de Cortacircuito FusiblesInocencio MartinezBelum ada peringkat
- Los Diodos de Potencia (Caracteristicas Dinamicas y Estaticas) y Tipos de EncapsuladosDokumen27 halamanLos Diodos de Potencia (Caracteristicas Dinamicas y Estaticas) y Tipos de EncapsuladoslervinjcBelum ada peringkat
- 21-22 PI Prac1a PresentacionDokumen38 halaman21-22 PI Prac1a PresentacionAdri SsBelum ada peringkat
- Honda Catalogo 2022Dokumen20 halamanHonda Catalogo 2022urolainezBelum ada peringkat
- Modulo V Guia Vi Sistema de CargaDokumen6 halamanModulo V Guia Vi Sistema de CargaLit FoxBelum ada peringkat
- AraozzzzzrecursosDokumen10 halamanAraozzzzzrecursosStephany Quichua VenegasBelum ada peringkat
- Codigos de Errores Impresoras HP PDFDokumen15 halamanCodigos de Errores Impresoras HP PDFJesus PinoBelum ada peringkat
- Taller de La Generaciones de Las ComputadorasDokumen9 halamanTaller de La Generaciones de Las ComputadorasFerley PCBelum ada peringkat
- 3.mecatronics (Modo de Compatibilidad) Kobelco PDFDokumen46 halaman3.mecatronics (Modo de Compatibilidad) Kobelco PDFDavid manjarres100% (1)
- Informe Taller MecanicoDokumen10 halamanInforme Taller MecanicoERIKA DAYANA RODRIGUEZ ZAMBRANOBelum ada peringkat
- Medidor Optico de ROEDokumen4 halamanMedidor Optico de ROEpaulwaveBelum ada peringkat
- Subaru Forester (2003)Dokumen2 halamanSubaru Forester (2003)EDUARDo GILBelum ada peringkat
- 2Dokumen13 halaman2frankzsaleBelum ada peringkat
- Anexo 2. Guía Técnica de Seguridad para Trabajo en Andamios (Multidireccional y Colgante) y Estructuras.Dokumen16 halamanAnexo 2. Guía Técnica de Seguridad para Trabajo en Andamios (Multidireccional y Colgante) y Estructuras.Yerald OlivosBelum ada peringkat
- Definicion y Partes ComputadorDokumen9 halamanDefinicion y Partes ComputadorKatty SalasBelum ada peringkat
- Trabajo Seguridad 01Dokumen10 halamanTrabajo Seguridad 01Giovanny CaleroBelum ada peringkat
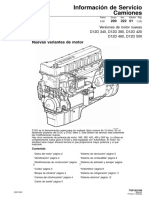
- Nuevos Motores D12DDokumen12 halamanNuevos Motores D12DAriel86% (7)
- Cotizador - Changan UNI-T LIMITED 1.5 AT 2WD - PASCAL DÍAZ VINCES - 020622Dokumen4 halamanCotizador - Changan UNI-T LIMITED 1.5 AT 2WD - PASCAL DÍAZ VINCES - 020622PacoBelum ada peringkat
- (TM) Yamaha Manual de Propietario Yamaha TDM 2000Dokumen110 halaman(TM) Yamaha Manual de Propietario Yamaha TDM 2000Tommaso De MaioBelum ada peringkat
- Curso Avanzado de Reparación de ComputadorasDokumen4 halamanCurso Avanzado de Reparación de ComputadorasMinerva Henrriquez0% (1)
- Catalogo Incom SubterraneoDokumen17 halamanCatalogo Incom SubterraneoVenta De Cochera RamirezBelum ada peringkat
- Cómo Medir Capacitancia Con Un Multímetro DigitalDokumen12 halamanCómo Medir Capacitancia Con Un Multímetro DigitalFanny EspinozaBelum ada peringkat
- S6 Electricidad Ind 201720-1 - Clave - S PDFDokumen8 halamanS6 Electricidad Ind 201720-1 - Clave - S PDFdavid floresBelum ada peringkat
- Cagp Lista Precios Dic2022 - AmbaDokumen4 halamanCagp Lista Precios Dic2022 - AmbaNicolásLoganBelum ada peringkat