Anda mungkin juga menyukai
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Dari EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Belum ada peringkat
- CS-424/580A Microcontrollers & RoboticsDokumen21 halamanCS-424/580A Microcontrollers & Roboticsprabhuswamiji6160Belum ada peringkat
- Core of Emb-SysDokumen52 halamanCore of Emb-SysSushrut ZemseBelum ada peringkat
- Module 1 - An Introduction to Computer Architecture and OrganizationDokumen50 halamanModule 1 - An Introduction to Computer Architecture and OrganizationSiddhantpsinghBelum ada peringkat
- Control and Computer Chapter1 2013Dokumen45 halamanControl and Computer Chapter1 2013wondi BETBelum ada peringkat
- 02 - Computer Evolution and PerformanceDokumen33 halaman02 - Computer Evolution and PerformanceZersh EthioBelum ada peringkat
- Es Unit1Dokumen83 halamanEs Unit1venneti kiranBelum ada peringkat
- Es Unit1Dokumen83 halamanEs Unit1venneti kiranBelum ada peringkat
- 5 - Embedded SystemsDokumen53 halaman5 - Embedded Systemsحساب ويندوزBelum ada peringkat
- Digital Signal Processor 3Dokumen25 halamanDigital Signal Processor 3Vijayaraghavan VBelum ada peringkat
- Fundamentals of MicroprocessorDokumen43 halamanFundamentals of MicroprocessorPrajaktaBelum ada peringkat
- Introduction To Microcontrollers: Sistemas Embebidos Oscar Acevedo, PHDDokumen24 halamanIntroduction To Microcontrollers: Sistemas Embebidos Oscar Acevedo, PHDLuis Miguel Buelvas GarciaBelum ada peringkat
- Introduction To Microcontrollers: Sistemas Embebidos Oscar Acevedo, PHDDokumen24 halamanIntroduction To Microcontrollers: Sistemas Embebidos Oscar Acevedo, PHDBrisman Ricardo Palacin VargasBelum ada peringkat
- lecture_one (1)Dokumen36 halamanlecture_one (1)Mworozi DicksonBelum ada peringkat
- Lecture 1: Introduction To ARM Based Embedded SystemsDokumen24 halamanLecture 1: Introduction To ARM Based Embedded SystemsSaurabh HedaBelum ada peringkat
- Welcom To EE323-Microprocessor Interfacing Program: CE (Fall 2016)Dokumen68 halamanWelcom To EE323-Microprocessor Interfacing Program: CE (Fall 2016)Imtiaz AzizBelum ada peringkat
- ESunit 1Dokumen80 halamanESunit 1topmotivezzBelum ada peringkat
- Microprocessor Fundamentals: by Physics Department Smt. CHM College, Ulhasanagar-3Dokumen26 halamanMicroprocessor Fundamentals: by Physics Department Smt. CHM College, Ulhasanagar-3Prof. Yashavant p. JadhavBelum ada peringkat
- Introductiontoembeddedsystems Lecture4,5Dokumen73 halamanIntroductiontoembeddedsystems Lecture4,5Abhishek JainBelum ada peringkat
- 8051 Microcontroller Architecture & Interfacing GuideDokumen178 halaman8051 Microcontroller Architecture & Interfacing Guidesivar22Belum ada peringkat
- Unit-1 (Module-1) : Introduction To MicrocontrollerDokumen20 halamanUnit-1 (Module-1) : Introduction To MicrocontrollerRajendra PatelBelum ada peringkat
- 1introduction To Embedded SystemDokumen96 halaman1introduction To Embedded SystemTech TutorialsBelum ada peringkat
- Computer Systems: Hardware (Book No. 1 Chapter 2)Dokumen82 halamanComputer Systems: Hardware (Book No. 1 Chapter 2)Belat CruzBelum ada peringkat
- Unit 1: Introduction To Embedded SystemDokumen48 halamanUnit 1: Introduction To Embedded SystemDenise NelsonBelum ada peringkat
- Mp1-Introduction To MicroprocessorsDokumen19 halamanMp1-Introduction To MicroprocessorsserjaniBelum ada peringkat
- Core Components of Embedded SystemsDokumen107 halamanCore Components of Embedded SystemsSanskrithi TigerBelum ada peringkat
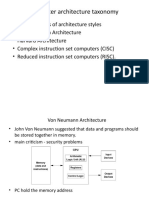
- Von Neumann vs Harvard Architecture ComparisonDokumen55 halamanVon Neumann vs Harvard Architecture Comparisonaroosa naheedBelum ada peringkat
- Stud CSA Processors Mod2 Part1Dokumen64 halamanStud CSA Processors Mod2 Part1SHEENA YBelum ada peringkat
- PDR - Unit IDokumen16 halamanPDR - Unit IMUKILANBelum ada peringkat
- Elements of Embedded SystemsDokumen40 halamanElements of Embedded SystemsAsante WilliamBelum ada peringkat
- Introduction To ComputersDokumen14 halamanIntroduction To ComputersajithBelum ada peringkat
- Single-Cycle MIPS ProcessorDokumen15 halamanSingle-Cycle MIPS ProcessorMALIK AWAIS UR REHMANBelum ada peringkat
- Assembly IntroductionDokumen31 halamanAssembly Introductionsohaibislam202Belum ada peringkat
- MCU Architecture & Programming: An IntroductionDokumen26 halamanMCU Architecture & Programming: An IntroductionMarc Neil ApasBelum ada peringkat
- Embedded Systems Lecture on Design Challenges and Processor TechnologiesDokumen54 halamanEmbedded Systems Lecture on Design Challenges and Processor TechnologiesHafizBelum ada peringkat
- Week1 HacettepeDokumen51 halamanWeek1 Hacetteperavi_talawar-1Belum ada peringkat
- Presidency Univeristy,: School of Engineering Department of Computer Science & EngineeringDokumen62 halamanPresidency Univeristy,: School of Engineering Department of Computer Science & EngineeringAneal SinghBelum ada peringkat
- Computer architecture styles and instruction setsDokumen13 halamanComputer architecture styles and instruction setsSuresh VaruvelBelum ada peringkat
- Reduced Instruction Set ComputersDokumen30 halamanReduced Instruction Set ComputersSehrish BalochBelum ada peringkat
- Lecture No 9: Central Processing Unit Memory and Its Types Factors Affecting SpeedDokumen55 halamanLecture No 9: Central Processing Unit Memory and Its Types Factors Affecting SpeedRana Haseeb AbidBelum ada peringkat
- Class 1-Introduction To Microprocessor PDFDokumen36 halamanClass 1-Introduction To Microprocessor PDFDeepika AgrawalBelum ada peringkat
- Module 1 - 411Dokumen43 halamanModule 1 - 411رفال الجهنيBelum ada peringkat
- Need For Memory Hierarchy: (Unit-1,3) (M.M. Chapter 12)Dokumen23 halamanNeed For Memory Hierarchy: (Unit-1,3) (M.M. Chapter 12)Alvin Soriano AdduculBelum ada peringkat
- MICROPROCESSOR UNIT I SYLLABUSDokumen54 halamanMICROPROCESSOR UNIT I SYLLABUSNikhil DeshmukhBelum ada peringkat
- Advanced Risc MachinersDokumen21 halamanAdvanced Risc MachinersAANCHALBelum ada peringkat
- Lab Assignment 2: MIPS Single-Cycle Implementation: Electrical and Computer Engineering University of CyprusDokumen23 halamanLab Assignment 2: MIPS Single-Cycle Implementation: Electrical and Computer Engineering University of CyprusNguyễn Trường Giang100% (1)
- ES&RTOS-Firstppt IMODULEDokumen582 halamanES&RTOS-Firstppt IMODULEtopmotivezzBelum ada peringkat
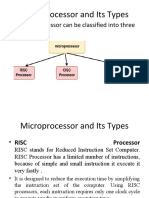
- Microprocessor and Its TypesDokumen16 halamanMicroprocessor and Its TypesAisha SarinBelum ada peringkat
- Lecture 5Dokumen31 halamanLecture 5Mohsin AliBelum ada peringkat
- What Is A Microprocessor?: - Computer's Central Processing Unit (CPU) Built On A SingleDokumen74 halamanWhat Is A Microprocessor?: - Computer's Central Processing Unit (CPU) Built On A SingleDarren Sherwin KennyBelum ada peringkat
- General IntroductionDokumen29 halamanGeneral IntroductionMisrak kassahunBelum ada peringkat
- Reduced Instruction Set Computers: (Make Hardware Simpler, But Quicker)Dokumen30 halamanReduced Instruction Set Computers: (Make Hardware Simpler, But Quicker)irenedevasahayamBelum ada peringkat
- Computer Organization: Basic Structure of ComputerDokumen59 halamanComputer Organization: Basic Structure of ComputersaiBelum ada peringkat
- Microprocessors: General-purpose microprocessor and its systemDokumen18 halamanMicroprocessors: General-purpose microprocessor and its systemSangamesh V AngadiBelum ada peringkat
- Intro To EsDokumen49 halamanIntro To EsGalal AtefBelum ada peringkat
- Microprocessor Systems Chapter 1 1Dokumen39 halamanMicroprocessor Systems Chapter 1 1Johnbob ToveraBelum ada peringkat
- UNIT-I Computer ArchitectureDokumen101 halamanUNIT-I Computer Architecturemusic12341234Belum ada peringkat
- Embedded Systems Basics - Lecture Notes - DrJineshDokumen114 halamanEmbedded Systems Basics - Lecture Notes - DrJineshJineshBelum ada peringkat
- Coa Module 1Dokumen79 halamanCoa Module 1B G JEEVANBelum ada peringkat
- Optimization Methods MetaheuristicsDokumen34 halamanOptimization Methods MetaheuristicsRaman BaluBelum ada peringkat
- Advanced Industrial Electronics - 2016Dokumen3 halamanAdvanced Industrial Electronics - 2016Gerardo ValenciaBelum ada peringkat
- Optimization Methods LPDokumen93 halamanOptimization Methods LPGerardo ValenciaBelum ada peringkat
- Optim 3 Properties 2016Dokumen3 halamanOptim 3 Properties 2016Gerardo ValenciaBelum ada peringkat
- Optimization Methods ConstrainedDokumen47 halamanOptimization Methods ConstrainedGerardo ValenciaBelum ada peringkat
- Optim 1 Introduction 2016Dokumen2 halamanOptim 1 Introduction 2016Gerardo ValenciaBelum ada peringkat
- Internsship - Project - Arjun Singh FinalDokumen78 halamanInternsship - Project - Arjun Singh FinalAnmol DubeyBelum ada peringkat
- Maemo - I - Introduction To MaemoDokumen15 halamanMaemo - I - Introduction To MaemoCatalin ConstantinBelum ada peringkat
- Life Cycle Assessment of BuildingDokumen12 halamanLife Cycle Assessment of BuildingBAIMOURNE BOURNEBE100% (1)
- ADC V NotesDokumen110 halamanADC V Noteskrishnakk100Belum ada peringkat
- 1805690Dokumen492 halaman18056901costin1Belum ada peringkat
- Online Shopping: Zalora PhilippinesDokumen4 halamanOnline Shopping: Zalora PhilippinesFlorence GonzalezBelum ada peringkat
- XML File UploadDokumen5 halamanXML File Uploadkanhaiya_priyadarshiBelum ada peringkat
- 04 JMS For Replace DoorDokumen2 halaman04 JMS For Replace DoorMohd KhaidirBelum ada peringkat
- Bored Piling Method Statement - Planning Engineer EstDokumen8 halamanBored Piling Method Statement - Planning Engineer EstboomiBelum ada peringkat
- Network Devices Hubs, Switches, RoutersDokumen24 halamanNetwork Devices Hubs, Switches, RoutersPaul67% (3)
- Engine Valve Lash PDFDokumen4 halamanEngine Valve Lash PDFJose PichinteBelum ada peringkat
- ALM On Power Platform - A POVDokumen12 halamanALM On Power Platform - A POVMudassar HassanBelum ada peringkat
- Lite-Puter DX-610/DX-626 User ManualDokumen12 halamanLite-Puter DX-610/DX-626 User Manualescuela_danza_2Belum ada peringkat
- Analysis Design Asynchronous Sequential CircuitsDokumen72 halamanAnalysis Design Asynchronous Sequential Circuitskumarguptav9175% (4)
- Business Continuity and Disaster RecoveryDokumen18 halamanBusiness Continuity and Disaster RecoveryUsaid KhanBelum ada peringkat
- TALKING ELECTRONCS 555 Page 2Dokumen7 halamanTALKING ELECTRONCS 555 Page 2Eugene FlexBelum ada peringkat
- SMR - GAG - Rooftop Solar PV Proposal - 26 October 2022 PDFDokumen51 halamanSMR - GAG - Rooftop Solar PV Proposal - 26 October 2022 PDFEssam KawrdyBelum ada peringkat
- Device Lab Report 10 PDFDokumen6 halamanDevice Lab Report 10 PDFScribble RiYaDBelum ada peringkat
- Utilities of Nishat Mills LimitedDokumen33 halamanUtilities of Nishat Mills LimitedossumyaqoobBelum ada peringkat
- Gibson Dark Fire Owner's ManualDokumen39 halamanGibson Dark Fire Owner's ManualSamuel David CastilloTorresBelum ada peringkat
- Online Bike Parts Store and Rental SystemDokumen4 halamanOnline Bike Parts Store and Rental SystemriysBelum ada peringkat
- Web Portfolio DesignDokumen10 halamanWeb Portfolio DesignDjks YobBelum ada peringkat
- Hi-Fog For Buildings: Technical IntroductionDokumen16 halamanHi-Fog For Buildings: Technical IntroductionEsther TapiaBelum ada peringkat
- Jungheinrich Spare Parts List Tool Et v4!37!498!07!2023Dokumen43 halamanJungheinrich Spare Parts List Tool Et v4!37!498!07!2023codysmith231084jsm99% (98)
- Public Health Engineering Department, Haryana Public Health Engineering Division No.2, Panipat Notice Inviting TenderDokumen17 halamanPublic Health Engineering Department, Haryana Public Health Engineering Division No.2, Panipat Notice Inviting Tenderpmcmbharat264Belum ada peringkat
- AIM OF THE EXPERIMENT:-Binary To Decimal, Gray Code Apparatus RequiredDokumen8 halamanAIM OF THE EXPERIMENT:-Binary To Decimal, Gray Code Apparatus RequiredSai KaneBelum ada peringkat
- Bist Tutorial 2 PDFDokumen9 halamanBist Tutorial 2 PDFjcfermosellBelum ada peringkat
- Group 1 TCHE425 (23 24) 2.1 Mid Term International Financial ManagementDokumen34 halamanGroup 1 TCHE425 (23 24) 2.1 Mid Term International Financial Managementtran phankBelum ada peringkat
- Introduction To Shell and Tube Heat Exchangers - Part01Dokumen24 halamanIntroduction To Shell and Tube Heat Exchangers - Part01SergioRinconSolanoBelum ada peringkat
- Automatic Dustbin Using Arduino: By-Yash Nawghare (PG18) Manav Walunj (PG21) Kaustubh Jagtap (PG24) Kundan Walunj (PG29)Dokumen14 halamanAutomatic Dustbin Using Arduino: By-Yash Nawghare (PG18) Manav Walunj (PG21) Kaustubh Jagtap (PG24) Kundan Walunj (PG29)Manav WalunjBelum ada peringkat