Anda mungkin juga menyukai
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDari EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsBelum ada peringkat
- Ashutosh 2Dokumen17 halamanAshutosh 2Kill MongerBelum ada peringkat
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDari EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlPenilaian: 5 dari 5 bintang5/5 (1)
- PID Controller Design For Two Tanks Liquid Level Control System Using MatlabDokumen7 halamanPID Controller Design For Two Tanks Liquid Level Control System Using MatlabJoko SantosoBelum ada peringkat
- Ds PICDokumen6 halamanDs PICSindhuja VijayaraghavanBelum ada peringkat
- Lab V - PDFDokumen4 halamanLab V - PDFZakBelum ada peringkat
- Waveform Synthesis Using Laplace TransformDokumen3 halamanWaveform Synthesis Using Laplace Transformkvamsee112Belum ada peringkat
- Test#1 - ECE 5664 - Spring 2021Dokumen7 halamanTest#1 - ECE 5664 - Spring 2021Muhammad FarooqBelum ada peringkat
- Fault-Tolerant Operation of An Open-End Winding Five-Phase PMSM Drive With Short-Circuit Inverter FaultDokumen11 halamanFault-Tolerant Operation of An Open-End Winding Five-Phase PMSM Drive With Short-Circuit Inverter Faultmitsui100% (1)
- EE208 Lab ManualDokumen38 halamanEE208 Lab Manualsakib shaukatBelum ada peringkat
- IUST v5n1p60 enDokumen7 halamanIUST v5n1p60 enAnonymous JIHJTWw4ThBelum ada peringkat
- Strategies For The Fault TolerantDokumen11 halamanStrategies For The Fault Tolerantrakeshee2007Belum ada peringkat
- Fault-Tolerant Control Strategy For Five-Phase PMSM With Third-Harmonic Current InjectionDokumen9 halamanFault-Tolerant Control Strategy For Five-Phase PMSM With Third-Harmonic Current InjectionAbir HezziBelum ada peringkat
- Dynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkDokumen6 halamanDynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkSuhail Ahmad SuhailBelum ada peringkat
- Automatic Control System of Speed of Synchronous Motor: SciencedirectDokumen6 halamanAutomatic Control System of Speed of Synchronous Motor: SciencedirectRedkit ofFootHillBelum ada peringkat
- 29-04-2021-1619690516-6-Ijeee-3. Ijeee - Comparison of Phasor and Wavelet Analysis Based Fault Classification AlgorithmDokumen12 halaman29-04-2021-1619690516-6-Ijeee-3. Ijeee - Comparison of Phasor and Wavelet Analysis Based Fault Classification Algorithmiaset123Belum ada peringkat
- Influence of Voltage Dips On The Operation of BrusDokumen12 halamanInfluence of Voltage Dips On The Operation of Brussalemg82Belum ada peringkat
- Torque-Angle Characteristics of Synchronous Machines Following DisturbancesDokumen10 halamanTorque-Angle Characteristics of Synchronous Machines Following DisturbancesJavierBelum ada peringkat
- Work RDDS IEL 11923455 622b3fbedc0c6Dokumen6 halamanWork RDDS IEL 11923455 622b3fbedc0c6LIU LIBelum ada peringkat
- Modeling, Simulation and Implementation of A Five-Phase Induction Motor Drive SystemDokumen6 halamanModeling, Simulation and Implementation of A Five-Phase Induction Motor Drive SystemBook4AllBelum ada peringkat
- Exp (6) 3-Phase Induction Motor Speed ControlDokumen9 halamanExp (6) 3-Phase Induction Motor Speed ControlMohamad MousaBelum ada peringkat
- Condition Monitoring and Faults Diagnosis For Synchronous Generator Using Neural NetworksDokumen9 halamanCondition Monitoring and Faults Diagnosis For Synchronous Generator Using Neural NetworksMk AlshaearBelum ada peringkat
- Minimization of Torque Ripple in Switched Reluctance Motor Drives Using Direct Instantaneous Torque ControlDokumen5 halamanMinimization of Torque Ripple in Switched Reluctance Motor Drives Using Direct Instantaneous Torque ControlAnel Bey TahirbegoviçBelum ada peringkat
- PMSM Open Corcuit FaultDokumen8 halamanPMSM Open Corcuit Faultzy lBelum ada peringkat
- Comparison and Simulated Result of Three and Five Phase Permanent Magnet Synchronous Motor (PMSM)Dokumen3 halamanComparison and Simulated Result of Three and Five Phase Permanent Magnet Synchronous Motor (PMSM)Zülfükar ArpağBelum ada peringkat
- 1999-Lausanne StroblDokumen9 halaman1999-Lausanne StroblMiten ThakkarBelum ada peringkat
- SantaDokumen11 halamanSantaVashik BedasieBelum ada peringkat
- Using Twenty Four Pulse AC-DC Converter Employing Pulse Doubling TechniqueDokumen11 halamanUsing Twenty Four Pulse AC-DC Converter Employing Pulse Doubling Techniquebakien-canBelum ada peringkat
- 16-Article Text-89-1-10-20191202Dokumen11 halaman16-Article Text-89-1-10-20191202okonkwo innocentBelum ada peringkat
- Karampuri 2016Dokumen6 halamanKarampuri 2016Kill MongerBelum ada peringkat
- Research On Differential Protection Algorithms of Power TransformersDokumen6 halamanResearch On Differential Protection Algorithms of Power TransformersrstppBelum ada peringkat
- Lab 3 3-Phase Induction Motor Characteristics - r2Dokumen9 halamanLab 3 3-Phase Induction Motor Characteristics - r2aaronBelum ada peringkat
- 4334-Article Text-26786-1-10-20190807Dokumen15 halaman4334-Article Text-26786-1-10-20190807anujBelum ada peringkat
- 10 1109@iCoMET48670 2020 9074060Dokumen6 halaman10 1109@iCoMET48670 2020 9074060mohammedismail4869Belum ada peringkat
- Chapter 5 Synchronous MachinesDokumen27 halamanChapter 5 Synchronous MachinesIfit PrabowoBelum ada peringkat
- International Journal of Engineering Research and Development (IJERD)Dokumen7 halamanInternational Journal of Engineering Research and Development (IJERD)IJERDBelum ada peringkat
- Energies 12 03462 v2Dokumen17 halamanEnergies 12 03462 v2KRISHNA KUMARBelum ada peringkat
- Ga Speed and DQ Currnets Control of PMSM WithDokumen9 halamanGa Speed and DQ Currnets Control of PMSM Withhieuhuech1Belum ada peringkat
- Lab 2: Quanser Hardware and Proportional Control: I. ObjectiveDokumen7 halamanLab 2: Quanser Hardware and Proportional Control: I. ObjectiveAndré LeopoldinoBelum ada peringkat
- Genetic 15 LDokumen6 halamanGenetic 15 LMasudur RahmanBelum ada peringkat
- Ijireeice 123 PDFDokumen6 halamanIjireeice 123 PDFUpama DasBelum ada peringkat
- Final Submission - IMCERT - ID32 - 30-1-23Dokumen5 halamanFinal Submission - IMCERT - ID32 - 30-1-23Usman RaiBelum ada peringkat
- IEEE PES 12plsdfa20mcmsamDokumen7 halamanIEEE PES 12plsdfa20mcmsamParameswararao BillaBelum ada peringkat
- Mohsin 2020 IOP Conf. Ser. Mater. Sci. Eng. 745 012022Dokumen8 halamanMohsin 2020 IOP Conf. Ser. Mater. Sci. Eng. 745 012022Tahseen AliBelum ada peringkat
- Step by Step Ieee AWESOMEDokumen6 halamanStep by Step Ieee AWESOMESimon Pedro Aguilar RiosBelum ada peringkat
- dSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorDokumen6 halamandSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorAshwani RanaBelum ada peringkat
- Electric Machine SimulationDokumen6 halamanElectric Machine SimulationherytriwBelum ada peringkat
- Fuzzy-Logic Control of Single - Phase Induction Motor Operated As Two - Phase Induction MotorDokumen10 halamanFuzzy-Logic Control of Single - Phase Induction Motor Operated As Two - Phase Induction Motor123456mkBelum ada peringkat
- Generalized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)Dokumen6 halamanGeneralized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)harisimpBelum ada peringkat
- A Novel Six-Phase Series-Connected Two-Motor Drive With Decoupled Dynamic ControlDokumen8 halamanA Novel Six-Phase Series-Connected Two-Motor Drive With Decoupled Dynamic ControlSherif M. DabourBelum ada peringkat
- Exercise2 AssignmentDokumen3 halamanExercise2 AssignmentAhmedNawazBelum ada peringkat
- ED Lab Manual Original - Exp 6 To Exp 10Dokumen33 halamanED Lab Manual Original - Exp 6 To Exp 10Umang MewaraBelum ada peringkat
- Induction MatlabDokumen12 halamanInduction Matlabgrido002Belum ada peringkat
- Using The PMSM Vector Control eTPU Function: Covers The MCF523x, MPC5500, MPC5600 and All eTPU-Equipped DevicesDokumen27 halamanUsing The PMSM Vector Control eTPU Function: Covers The MCF523x, MPC5500, MPC5600 and All eTPU-Equipped Devicesbadro1980Belum ada peringkat
- Standards HarmonicsDokumen17 halamanStandards HarmonicsWicax Tegguh100% (1)
- 55 NewDokumen74 halaman55 Newకెవి సాయిBelum ada peringkat
- Universal: System Simulation LabDokumen55 halamanUniversal: System Simulation LabharimadhavareddyBelum ada peringkat
- Space Vector Flux Weakening Control of PMSM DriverDokumen8 halamanSpace Vector Flux Weakening Control of PMSM DriverOsama AttookBelum ada peringkat
- JIE1 ModDokumen6 halamanJIE1 ModAshwani RanaBelum ada peringkat
- Fuzzy-Logic-Based Control Applied To A HDokumen9 halamanFuzzy-Logic-Based Control Applied To A HbensumbbBelum ada peringkat
- Virtual Flux Based Direct Power Control of Three-Phase PWM Rectifiers PDFDokumen9 halamanVirtual Flux Based Direct Power Control of Three-Phase PWM Rectifiers PDFbensumbbBelum ada peringkat
- Speed Control of Separately Excited DC Motor Using Fuzzy Neural Model Reference ControllerDokumen14 halamanSpeed Control of Separately Excited DC Motor Using Fuzzy Neural Model Reference ControllerbensumbbBelum ada peringkat
- A MPPT Strategy Based On Cuckoo Search For Wind enDokumen6 halamanA MPPT Strategy Based On Cuckoo Search For Wind enbensumbbBelum ada peringkat
- Systèmes Électriques Résumés de Cours Et Problèmes Corrigés Sur: Machines À Courant Continu Réseaux Électriques Triphasés Transformateurs TriphasésDokumen2 halamanSystèmes Électriques Résumés de Cours Et Problèmes Corrigés Sur: Machines À Courant Continu Réseaux Électriques Triphasés Transformateurs TriphasésbensumbbBelum ada peringkat
- A Generalized Transformation Methodology For Polyphase Electric Machines and NetworksDokumen8 halamanA Generalized Transformation Methodology For Polyphase Electric Machines and NetworksbensumbbBelum ada peringkat
- Workshop SIDokumen1 halamanWorkshop SIbensumbbBelum ada peringkat
- Workshop MCMDokumen1 halamanWorkshop MCMbensumbbBelum ada peringkat
- Five-Level NPC-VSI Capacitor Voltage Balancing Using A Novel Clamping BridgeDokumen6 halamanFive-Level NPC-VSI Capacitor Voltage Balancing Using A Novel Clamping BridgebensumbbBelum ada peringkat
- Call For Papers - ACECS'2016Dokumen1 halamanCall For Papers - ACECS'2016bensumbbBelum ada peringkat
- Identification of Faults and Its Location in Transmission Line by Using Wavelet TransformDokumen5 halamanIdentification of Faults and Its Location in Transmission Line by Using Wavelet TransformbensumbbBelum ada peringkat
- Identification of Faults in HVDC System Using Wavelet AnalysisDokumen8 halamanIdentification of Faults in HVDC System Using Wavelet AnalysisbensumbbBelum ada peringkat
- Faults Diagnosis in Five-Level Three-Phase Shunt Active Power FilterDokumen11 halamanFaults Diagnosis in Five-Level Three-Phase Shunt Active Power FilterbensumbbBelum ada peringkat
- PBPO080 - Chung - Cover Options For EditorsDokumen1 halamanPBPO080 - Chung - Cover Options For EditorsbensumbbBelum ada peringkat
- Passivity-Based Stability Assessment of Grid-Connected Vscs-An OverviewDokumen10 halamanPassivity-Based Stability Assessment of Grid-Connected Vscs-An OverviewbensumbbBelum ada peringkat
- IRSEC15 Advanced Program OverviewDokumen2 halamanIRSEC15 Advanced Program OverviewbensumbbBelum ada peringkat
- 2014 Ieee Iecon Wavelet HVDCDokumen7 halaman2014 Ieee Iecon Wavelet HVDCbensumbbBelum ada peringkat
- Failure Prognosis For Permanent Magnet AC Drives Based On Wavelet AnalysisDokumen7 halamanFailure Prognosis For Permanent Magnet AC Drives Based On Wavelet AnalysisbensumbbBelum ada peringkat
- Methods To Identify Intermittent Electrical and Mechanical Faults in Permanent Magnet AC Drives Based On Wavelet AnalysisDokumen7 halamanMethods To Identify Intermittent Electrical and Mechanical Faults in Permanent Magnet AC Drives Based On Wavelet AnalysisbensumbbBelum ada peringkat
- Asian Engineering ReviewDokumen12 halamanAsian Engineering ReviewbensumbbBelum ada peringkat
- S e N S o R S & T R A N S D U C e R SDokumen1 halamanS e N S o R S & T R A N S D U C e R SbensumbbBelum ada peringkat
- 13 Fault DiagnosisDokumen8 halaman13 Fault DiagnosisbensumbbBelum ada peringkat
- Fault Diagnosis of Three-Phase PWM Inverters Using Wavelet and SVMDokumen9 halamanFault Diagnosis of Three-Phase PWM Inverters Using Wavelet and SVMbensumbbBelum ada peringkat
- QIS65Dokumen9 halamanQIS65Ken VikstromBelum ada peringkat
- 15 KW Induction ManualDokumen5 halaman15 KW Induction Manualxreader0Belum ada peringkat
- Lecture 01 - IntroductionDokumen6 halamanLecture 01 - IntroductionArnulfo LavaresBelum ada peringkat
- Deuta SensorsDokumen11 halamanDeuta SensorsRickyBelum ada peringkat
- C876 PDFDokumen6 halamanC876 PDFJorge Luis Arevalo LopezBelum ada peringkat
- VLSI Nandita Das GuptaDokumen23 halamanVLSI Nandita Das Guptakarthika nairBelum ada peringkat
- Xerox Phaser - 7700 Service ManualDokumen380 halamanXerox Phaser - 7700 Service ManualSaranovicu KrstoBelum ada peringkat
- Industrial Motor StarterDokumen8 halamanIndustrial Motor Starterchidambaram kasiBelum ada peringkat
- Datasheet UBECDokumen1 halamanDatasheet UBECjajang_elektro_untirtaBelum ada peringkat
- Modeling Examples SharingDokumen3 halamanModeling Examples Sharingvinu198500Belum ada peringkat
- Test Series For Neet-2020Dokumen16 halamanTest Series For Neet-2020kavyareddyBelum ada peringkat
- Voltage Selection RelayDokumen2 halamanVoltage Selection RelayNida Varol DeveciBelum ada peringkat
- Apxvll13n CDokumen2 halamanApxvll13n CqaisersiddiBelum ada peringkat
- Routh Criterion - Tutorial 7 - Co - 12Dokumen3 halamanRouth Criterion - Tutorial 7 - Co - 12Haelu KuBelum ada peringkat
- DMS DGS FilterDokumen20 halamanDMS DGS FiltersamBelum ada peringkat
- ELK-110 Voice Driver - Install GuideDokumen2 halamanELK-110 Voice Driver - Install GuideAlarm Grid Home Security and Alarm MonitoringBelum ada peringkat
- Micro Assignment 2 (17BEC1009)Dokumen12 halamanMicro Assignment 2 (17BEC1009)Austin NixonBelum ada peringkat
- Pre-Board 2020 - Physics PDFDokumen9 halamanPre-Board 2020 - Physics PDFYASH PRANESHBelum ada peringkat
- SCR100 User Manual V1.1Dokumen35 halamanSCR100 User Manual V1.1Luis Boch EnriquezBelum ada peringkat
- Zelio Electromechanical: RelaysDokumen45 halamanZelio Electromechanical: RelaysDaniel ReyBelum ada peringkat
- Vibration Measurement of The Generator Stator End Windings and Precautions Against Insulation Wearing PDFDokumen4 halamanVibration Measurement of The Generator Stator End Windings and Precautions Against Insulation Wearing PDFCRISTIAN CAMILO MORALES SOLISBelum ada peringkat
- Gs01c50h01-01en 001Dokumen13 halamanGs01c50h01-01en 001Alvaro Quinteros CabreraBelum ada peringkat
- Diodos ZenerDokumen3 halamanDiodos Zenerremanuel18Belum ada peringkat
- Operation Manual of Aob29 Series Digital Voltmeter&Ammeter: Chapter 1. General InstructionDokumen2 halamanOperation Manual of Aob29 Series Digital Voltmeter&Ammeter: Chapter 1. General InstructionTato SierraBelum ada peringkat
- Ppe Logistics Os Ord.Dokumen17 halamanPpe Logistics Os Ord.essica.landoBelum ada peringkat
- Harness Draft - Product Knowledge - 16th Dec 2016Dokumen42 halamanHarness Draft - Product Knowledge - 16th Dec 2016manohar rajuBelum ada peringkat
- Bok:978 3 319 17659 8Dokumen365 halamanBok:978 3 319 17659 8Miguel Ángel González GaliciaBelum ada peringkat
- Kollmorgen KBM Series 2011 CatalogDokumen80 halamanKollmorgen KBM Series 2011 CatalogElectromateBelum ada peringkat
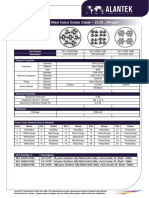
- Outdoor Gel-Filled Cat3 2550100pair UTP v2.1Dokumen1 halamanOutdoor Gel-Filled Cat3 2550100pair UTP v2.1BinhBelum ada peringkat
- Shorting the Grid: The Hidden Fragility of Our Electric GridDari EverandShorting the Grid: The Hidden Fragility of Our Electric GridPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingDari EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingBelum ada peringkat
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialDari EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialBelum ada peringkat
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterDari EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterBelum ada peringkat
- Electric Motor Control: DC, AC, and BLDC MotorsDari EverandElectric Motor Control: DC, AC, and BLDC MotorsPenilaian: 4.5 dari 5 bintang4.5/5 (19)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentDari EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentPenilaian: 4.5 dari 5 bintang4.5/5 (21)
- Electric Motors and Drives: Fundamentals, Types and ApplicationsDari EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsPenilaian: 4.5 dari 5 bintang4.5/5 (12)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsDari EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsBelum ada peringkat
- Well Integrity for Workovers and RecompletionsDari EverandWell Integrity for Workovers and RecompletionsPenilaian: 5 dari 5 bintang5/5 (3)
- Well Control for Completions and InterventionsDari EverandWell Control for Completions and InterventionsPenilaian: 4 dari 5 bintang4/5 (10)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesDari EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesPenilaian: 4.5 dari 5 bintang4.5/5 (21)
- Introduction to Power System ProtectionDari EverandIntroduction to Power System ProtectionPenilaian: 5 dari 5 bintang5/5 (1)
- Handbook on Battery Energy Storage SystemDari EverandHandbook on Battery Energy Storage SystemPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsDari EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Thermal Power Plant: Design and OperationDari EverandThermal Power Plant: Design and OperationPenilaian: 4.5 dari 5 bintang4.5/5 (23)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ADari EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ABelum ada peringkat
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsDari EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsBelum ada peringkat
- Pipeline and Energy Plant Piping: Design and TechnologyDari EverandPipeline and Energy Plant Piping: Design and TechnologyPenilaian: 5 dari 5 bintang5/5 (2)
- Photovoltaic Solar Energy: From Fundamentals to ApplicationsDari EverandPhotovoltaic Solar Energy: From Fundamentals to ApplicationsBelum ada peringkat
- Smart Power Distribution Systems: Control, Communication, and OptimizationDari EverandSmart Power Distribution Systems: Control, Communication, and OptimizationBelum ada peringkat
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Dari EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Belum ada peringkat
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksDari EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksBelum ada peringkat