Anda mungkin juga menyukai
- SMOD - Manual - DistribuciónDokumen108 halamanSMOD - Manual - DistribuciónMilder Orué100% (1)
- Reclutamiento y Seleccion de PersonalDokumen21 halamanReclutamiento y Seleccion de PersonalMarck CND100% (1)
- Justo A TiempoDokumen11 halamanJusto A TiempoEliud Daniel100% (1)
- Perforación Mecanizada - MepDokumen66 halamanPerforación Mecanizada - MepSköulls SpartBelum ada peringkat
- Unidad 2 Mapa ConceptualDokumen7 halamanUnidad 2 Mapa ConceptualNorma Yulet TrinidadBelum ada peringkat
- Dimensionamiento FVDokumen34 halamanDimensionamiento FVWalter MosqueraBelum ada peringkat
- Inyeccion Diesel Common Rail Bosch (Excelente)Dokumen117 halamanInyeccion Diesel Common Rail Bosch (Excelente)Anonymous 7t2BOJbBelum ada peringkat
- Proyecto Final OP 2018-2SDokumen3 halamanProyecto Final OP 2018-2SWalter MosqueraBelum ada peringkat
- Electronica 1Dokumen17 halamanElectronica 1Walter MosqueraBelum ada peringkat
- Folleto de Maquinaria ElectricaDokumen73 halamanFolleto de Maquinaria ElectricaAnonymous 7rbDr3bIBelum ada peringkat
- Examen Lineas de Transmision y Subestaciones - ESPOLDokumen2 halamanExamen Lineas de Transmision y Subestaciones - ESPOLWalter MosqueraBelum ada peringkat
- Practica #5 PID Lab Sistemas de ControlDokumen12 halamanPractica #5 PID Lab Sistemas de ControlWalter MosqueraBelum ada peringkat
- LAB#1 OperacionesSP MosqueraVélizDokumen12 halamanLAB#1 OperacionesSP MosqueraVélizWalter MosqueraBelum ada peringkat
- Mosquera Veliz Labmaquinas Pr4 Elec1001Dokumen10 halamanMosquera Veliz Labmaquinas Pr4 Elec1001Walter MosqueraBelum ada peringkat
- Practica#1 LabDE Mosquera WalterDokumen11 halamanPractica#1 LabDE Mosquera WalterWalter MosqueraBelum ada peringkat
- Sp2 Proyecto 1er Parcial DiapositivasDokumen14 halamanSp2 Proyecto 1er Parcial DiapositivasWalter MosqueraBelum ada peringkat
- Normas de LaboratorioDokumen4 halamanNormas de LaboratorioWalter MosqueraBelum ada peringkat
- Practica#5Dokumen4 halamanPractica#5Walter MosqueraBelum ada peringkat
- Corriente Alterna PDFDokumen72 halamanCorriente Alterna PDFE Omar Sanchez ABelum ada peringkat
- Pre Practica#5Dokumen4 halamanPre Practica#5Walter MosqueraBelum ada peringkat
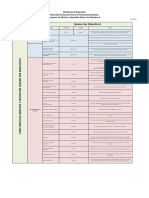
- Cronograma Elegibilidad Meritos y Oposicion QSM 6 V3Dokumen1 halamanCronograma Elegibilidad Meritos y Oposicion QSM 6 V3Walter MosqueraBelum ada peringkat
- 1 SalmonellaDokumen6 halaman1 Salmonellajose angBelum ada peringkat
- Pre Parctica 1Dokumen5 halamanPre Parctica 1Walter MosqueraBelum ada peringkat
- Práctica#2Dokumen2 halamanPráctica#2Walter MosqueraBelum ada peringkat
- Practica#5Dokumen4 halamanPractica#5Walter MosqueraBelum ada peringkat
- Fisica Ejercicios Resueltos Soluciones El Campo Electrico PDFDokumen20 halamanFisica Ejercicios Resueltos Soluciones El Campo Electrico PDFlos sabiosBelum ada peringkat
- Diagrama UnifilarDokumen1 halamanDiagrama UnifilarWalter MosqueraBelum ada peringkat
- Pre Práctica#2Dokumen2 halamanPre Práctica#2Walter MosqueraBelum ada peringkat
- E. Solar PDFDokumen35 halamanE. Solar PDFDanny Riofrio CornelBelum ada peringkat
- Práctica1B (Simulacion)Dokumen4 halamanPráctica1B (Simulacion)Walter MosqueraBelum ada peringkat
- 8 Ejercicios Sentencias Repeticion PDFDokumen2 halaman8 Ejercicios Sentencias Repeticion PDFWalter MosqueraBelum ada peringkat
- Cargador Baterías 18650Dokumen15 halamanCargador Baterías 18650carnesdehesaBelum ada peringkat
- Comparacion de Precios en ExcelDokumen1 halamanComparacion de Precios en ExcelSergio LozaBelum ada peringkat
- Las 6 MDokumen2 halamanLas 6 MSsagastume OsswaldoBelum ada peringkat
- Analizador de Proceso en Línea 1Dokumen4 halamanAnalizador de Proceso en Línea 1Erika LMBelum ada peringkat
- Preguntas de Organizacion de ProyectosDokumen10 halamanPreguntas de Organizacion de ProyectosIvan PerezBelum ada peringkat
- Qué Son Los Circuitos en Serie y Circuitos en ParaleloDokumen2 halamanQué Son Los Circuitos en Serie y Circuitos en Paraleloclugo78Belum ada peringkat
- Ofertas Laptops 11 Febrero 2023Dokumen9 halamanOfertas Laptops 11 Febrero 2023Luciana FajardoBelum ada peringkat
- MLDokumen8 halamanMLCindy MarinBelum ada peringkat
- Código de RelojDokumen12 halamanCódigo de RelojAdyt Villanueva CastellanosBelum ada peringkat
- Requisitos para Ser Un Buen EstimadorDokumen4 halamanRequisitos para Ser Un Buen Estimadorhevelyn ricci melchorBelum ada peringkat
- Gardenia Ramirez - Portafolio InfotecnologíaDokumen25 halamanGardenia Ramirez - Portafolio InfotecnologíaJavier ReynosoBelum ada peringkat
- Tabla de Requerimiento Caso GlovexDokumen7 halamanTabla de Requerimiento Caso GlovexJosse Farid Oyola BarreroBelum ada peringkat
- Ensayo PNLDokumen2 halamanEnsayo PNLgeorgeholaBelum ada peringkat
- SemaforosDokumen16 halamanSemaforosGregory CarrascoBelum ada peringkat
- Programa de Mantenimiento Electronico e Instrumental Industrial 224208 ListoDokumen34 halamanPrograma de Mantenimiento Electronico e Instrumental Industrial 224208 Listodjecko100% (3)
- OSPFDokumen12 halamanOSPFLuis EduardoBelum ada peringkat
- GAMMIFICACIONDokumen18 halamanGAMMIFICACIONHENRY CHOQUE GONZALOBelum ada peringkat
- Versiones de AndroidDokumen9 halamanVersiones de AndroidChristian Jhon Agustin HilarioBelum ada peringkat
- Fundamentos de Programacion Visual Basic PDFDokumen37 halamanFundamentos de Programacion Visual Basic PDFseaBelum ada peringkat
- Tesis JuanRamon Feijoo MartinezDokumen155 halamanTesis JuanRamon Feijoo MartinezStephie Pinto GallardoBelum ada peringkat
- Inteligencia CriminalDokumen24 halamanInteligencia CriminalJose LopezBelum ada peringkat
- Diseño de Elementos de MaquinasDokumen412 halamanDiseño de Elementos de MaquinasSergio C. Barcenas100% (1)
- Reglamento de Vuelo para La Aviacion Del Ejército 3-176-1Dokumen198 halamanReglamento de Vuelo para La Aviacion Del Ejército 3-176-1DanielriosalazarBelum ada peringkat
- 02 Ravpac-PDokumen6 halaman02 Ravpac-PEmmanuel ZamoranoBelum ada peringkat