Anda mungkin juga menyukai
- Redes Neurais para Sistemas de Recomendação: uso de Redes Neurais Recorrentes para tratamento de Cold-Start ProblemDari EverandRedes Neurais para Sistemas de Recomendação: uso de Redes Neurais Recorrentes para tratamento de Cold-Start ProblemBelum ada peringkat
- CEPEL-Evaluation of STATCOM Model For Electromagnetic and Electromechanical Transients (2018)Dokumen6 halamanCEPEL-Evaluation of STATCOM Model For Electromagnetic and Electromechanical Transients (2018)Gustavo AguayoBelum ada peringkat
- Controle DigitalDari EverandControle DigitalBelum ada peringkat
- Apresentação CEFET-30.04.19 PDFDokumen56 halamanApresentação CEFET-30.04.19 PDFWilsonAlvesBelum ada peringkat
- Álgebra Complexa e FasoresDokumen26 halamanÁlgebra Complexa e FasoresNikolas de QueirozBelum ada peringkat
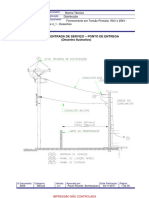
- Para Rio Baixa Tensão - PRBT - RdsDokumen6 halamanPara Rio Baixa Tensão - PRBT - RdsRafael GonçalvesBelum ada peringkat
- MatLab - R2015a - Engenheiros AnonimosDokumen5 halamanMatLab - R2015a - Engenheiros AnonimosIgorFaro100% (1)
- Avaliação Do Desempenho de Isoladores Quanto À RadiointerferênciaDokumen6 halamanAvaliação Do Desempenho de Isoladores Quanto À RadiointerferênciaFernando SantosBelum ada peringkat
- Ged - CPFL DesenhosDokumen39 halamanGed - CPFL DesenhosedmarrobBelum ada peringkat
- Análise Estatística de Dados Usando Métodos BayesianosDokumen117 halamanAnálise Estatística de Dados Usando Métodos BayesianosDiegoPagungAmbrosiniBelum ada peringkat
- nd53 Manual de Distribuição CEMIGDokumen108 halamannd53 Manual de Distribuição CEMIGDaniel Roberto KrammerBelum ada peringkat
- CEMIG Organograma 28-02-2015Dokumen1 halamanCEMIG Organograma 28-02-2015scribd8885708100% (1)
- Isoladores Polimericos - Lavagem e Suas Consequencia PDFDokumen6 halamanIsoladores Polimericos - Lavagem e Suas Consequencia PDFJuciane ECarlos OliboniBelum ada peringkat
- Cabo Submarino DM Renatanascimento 2016 MeeseDokumen140 halamanCabo Submarino DM Renatanascimento 2016 MeesesolBelum ada peringkat
- Anarede Primeiros Passo GraficoDokumen19 halamanAnarede Primeiros Passo Graficojeffersonc61Belum ada peringkat
- Teoria Das Ondas Viajantes e Filtragem Adaptativa de Sinais para Localização de Faltas em Linhas de TransmissãoDokumen6 halamanTeoria Das Ondas Viajantes e Filtragem Adaptativa de Sinais para Localização de Faltas em Linhas de TransmissãoMarcos HenriqueBelum ada peringkat
- NBR 5119 - Reator para Sistemas de PotenciaDokumen59 halamanNBR 5119 - Reator para Sistemas de PotenciaLuís Barbieri100% (1)
- Desenvolvimento e Implementação de Dispositivos de Protecao AtpDokumen6 halamanDesenvolvimento e Implementação de Dispositivos de Protecao AtpClaudenei SimãoBelum ada peringkat
- Nota2005191srt PDFDokumen21 halamanNota2005191srt PDFFelipe Vital FialhoBelum ada peringkat
- Very Fast Transient o SigDokumen7 halamanVery Fast Transient o SigRomulo FerreiraBelum ada peringkat
- Curso de Matlab para EngenheirosDokumen74 halamanCurso de Matlab para EngenheirosAmancio DohoBelum ada peringkat
- Diretrizes Da ABNT NBR 5410-2004 - Proteção Contra SurtosDokumen21 halamanDiretrizes Da ABNT NBR 5410-2004 - Proteção Contra Surtosgiant360Belum ada peringkat
- AULA 1 - Princípios de Funcionamento Do Motor SíncronoDokumen42 halamanAULA 1 - Princípios de Funcionamento Do Motor SíncronoOrci AlbuquerqueBelum ada peringkat
- Guia Atp PDFDokumen84 halamanGuia Atp PDFjuang_478Belum ada peringkat
- Equações de MaxwellDokumen16 halamanEquações de MaxwellThais NascimentoBelum ada peringkat
- Prática 919055-1 Circuitos Elétricos IIIDokumen6 halamanPrática 919055-1 Circuitos Elétricos IIIMário Augusto GarciaBelum ada peringkat
- Tutorial - Matlab + Proteus + ArduinoDokumen8 halamanTutorial - Matlab + Proteus + ArduinoArthur Schuler da IgrejaBelum ada peringkat
- Efeito Skin - SimulaçãoDokumen11 halamanEfeito Skin - SimulaçãoBruno MeloBelum ada peringkat
- Apostila REATORDokumen59 halamanApostila REATORAnd WebBelum ada peringkat
- O "Milagre" Da Multiplicação Dos Ampéres - Aspectos de Ressonância Harmônica (Parte II) Ressonância Série e Ressonância ParalelaDokumen2 halamanO "Milagre" Da Multiplicação Dos Ampéres - Aspectos de Ressonância Harmônica (Parte II) Ressonância Série e Ressonância ParalelaGeorge Romero Tadeu Carvalho NunesBelum ada peringkat
- NBR 10500 - Cabo Telefonico CTP-APL-GE Isolado Com Polietileno Ou Polipropileno Protegido Por CapDokumen21 halamanNBR 10500 - Cabo Telefonico CTP-APL-GE Isolado Com Polietileno Ou Polipropileno Protegido Por CapAntonio TakeshiBelum ada peringkat
- Apostila MATLABDokumen68 halamanApostila MATLABGisele Alves SantanaBelum ada peringkat
- Manual Do M4000 (Português) PDFDokumen212 halamanManual Do M4000 (Português) PDFFilipe BeloBelum ada peringkat
- Fabricação Bronze FundidosDokumen17 halamanFabricação Bronze FundidosMatheus Lopes100% (1)
- Submódulo 2.3. Requisitos Mínimos para Transformadores e para Subestações e Seus EquipamentosDokumen32 halamanSubmódulo 2.3. Requisitos Mínimos para Transformadores e para Subestações e Seus EquipamentosRhuan De AraujoBelum ada peringkat
- Atp DrawDokumen6 halamanAtp DrawRafael FeitosaBelum ada peringkat
- Um Localizador de Faltas de Alta Impedância A Partir de Dados Reais Utilizando Inteligência ArtificialDokumen152 halamanUm Localizador de Faltas de Alta Impedância A Partir de Dados Reais Utilizando Inteligência ArtificialMaxwell Barbosa MedeiroaBelum ada peringkat
- 1 - Coordenação de Isolamento - IntroduçãoDokumen7 halaman1 - Coordenação de Isolamento - IntroduçãoAndre Luis RochaBelum ada peringkat
- SP - F.S.E.E - 2004-05 PDFDokumen142 halamanSP - F.S.E.E - 2004-05 PDFIvandro Pereira MendonçaBelum ada peringkat
- Avaliação de Desempenho de Transformadores de Potência e Reatores No Sistema Elétrico BrasileiroDokumen40 halamanAvaliação de Desempenho de Transformadores de Potência e Reatores No Sistema Elétrico BrasileiroClaudio MoreiraBelum ada peringkat
- ET 02.118-CEMIG-395mDokumen46 halamanET 02.118-CEMIG-395mlohanna.ufu100% (1)
- Catalogo NexansDokumen50 halamanCatalogo Nexanssssaulo1Belum ada peringkat
- 4 - Roberlam - Estratificação Do SoloDokumen19 halaman4 - Roberlam - Estratificação Do SoloROBERLAM GONAÇLVES DE MENDONÇABelum ada peringkat
- Transformadores HormonicasDokumen75 halamanTransformadores Hormonicassssaulo1Belum ada peringkat
- RSLEATDokumen78 halamanRSLEATJacinto RodriguesBelum ada peringkat
- Estudostecnicoseeconomicos PDFDokumen372 halamanEstudostecnicoseeconomicos PDFoaktree2010Belum ada peringkat
- Condicoes Tecnicas Da Ligacao Da Producao DescentralizadaDokumen40 halamanCondicoes Tecnicas Da Ligacao Da Producao DescentralizadaJosé LopesBelum ada peringkat
- GLT 34Dokumen11 halamanGLT 34Marcelo ProtzBelum ada peringkat
- AES ELETROPAULO - NTE - 8048 Transformador SubterrâneoDokumen39 halamanAES ELETROPAULO - NTE - 8048 Transformador SubterrâneoVictorForcadellBelum ada peringkat
- Acoplamento de PoliasDokumen4 halamanAcoplamento de PoliasLeonardo DruzianBelum ada peringkat
- Estudo e Caracterização Da Corrente de Fuga em Sistemas Isolantes de Linhas de Distribuição No Estado de Santa CatarinaDokumen2 halamanEstudo e Caracterização Da Corrente de Fuga em Sistemas Isolantes de Linhas de Distribuição No Estado de Santa CatarinaFernando OliveiraBelum ada peringkat
- Reatores Derivação PDFDokumen55 halamanReatores Derivação PDFMaxwell WilliamBelum ada peringkat
- Simulador de Processos Industriais paraDokumen14 halamanSimulador de Processos Industriais paraAdelmoKarigBelum ada peringkat
- Exp2 Guia ExpDokumen17 halamanExp2 Guia Expgustavo8jorge-1Belum ada peringkat
- Sistema Microprocessado para Controle de Posição AngularDokumen14 halamanSistema Microprocessado para Controle de Posição AngularÉlisson RíllerBelum ada peringkat
- Trena DigitalDokumen5 halamanTrena DigitalAlex SouzaBelum ada peringkat
- MedidasDokumen18 halamanMedidasFernandes ManuelBelum ada peringkat
- RAFA JOB (Recuperado Automaticamente)Dokumen9 halamanRAFA JOB (Recuperado Automaticamente)FATIMA RAMOSBelum ada peringkat
- Anatem - Manual PDFDokumen356 halamanAnatem - Manual PDFTrostskyBelum ada peringkat
- Manual ANAREDE V09 PDFDokumen326 halamanManual ANAREDE V09 PDFMarcelo Lima100% (1)
- Submódulo 10.22.01 - Relatório de Análise de Ocorrência (RAO)Dokumen10 halamanSubmódulo 10.22.01 - Relatório de Análise de Ocorrência (RAO)Matheus VarelaBelum ada peringkat
- Submódulo 10.15 Triagem de OcorrênciasDokumen6 halamanSubmódulo 10.15 Triagem de OcorrênciasMatheus VarelaBelum ada peringkat
- Submódulo 2.8 PDFDokumen32 halamanSubmódulo 2.8 PDFAlberto MedeirosBelum ada peringkat
- Introdução Ao Software AnaredeDokumen26 halamanIntrodução Ao Software AnaredeMatheus VarelaBelum ada peringkat
- Lista 1 A - Matrizes - GMTADokumen3 halamanLista 1 A - Matrizes - GMTAMatheus VarelaBelum ada peringkat
- 10F AL 2 1 PilhaDokumen2 halaman10F AL 2 1 PilhaHelena FernandesBelum ada peringkat
- Interligação de Sistemas Com Transformadores de Diferentes Grupos de Ligação Angular PDFDokumen8 halamanInterligação de Sistemas Com Transformadores de Diferentes Grupos de Ligação Angular PDFGiovani ScarpatiBelum ada peringkat
- Roteiro de Trabalho 01 - Amplificador Emissor Comum (Errata)Dokumen2 halamanRoteiro de Trabalho 01 - Amplificador Emissor Comum (Errata)Carlos MendesBelum ada peringkat
- Eletrícidade BásicaDokumen42 halamanEletrícidade BásicaMariaClaraSchmidtLoncarovichBelum ada peringkat
- Geradores Elétricos, Potência No Gerador e Lei de PouilletDokumen21 halamanGeradores Elétricos, Potência No Gerador e Lei de PouilletRanderson VictorBelum ada peringkat
- Aula Gerador Elétrico e Resistência ElétricaDokumen11 halamanAula Gerador Elétrico e Resistência ElétricaFrancisco Josélio RafaelBelum ada peringkat
- 0lista1 FisicaiiiDokumen3 halaman0lista1 FisicaiiiTamy PereiraBelum ada peringkat
- Proposição de Sistemas Teste para Análise Computacional de Sistemas de PotênciaDokumen362 halamanProposição de Sistemas Teste para Análise Computacional de Sistemas de PotênciaJorge Henrique AngelimBelum ada peringkat
- QUESTAO Cap 7 e 8Dokumen14 halamanQUESTAO Cap 7 e 8Marcos GuilhermeBelum ada peringkat
- Medidor Do Ângulo de AtaqueDokumen181 halamanMedidor Do Ângulo de AtaqueDouglas PonteloBelum ada peringkat
- Testes Do Sistema SCR Do Motor Cummins ISFDokumen40 halamanTestes Do Sistema SCR Do Motor Cummins ISFlucio100% (2)
- Exercícios de Máquinas ElétricasDokumen3 halamanExercícios de Máquinas ElétricasPaullusCordeiroBelum ada peringkat
- Manutencao e Reparos de Sistemas Eletricos de AutomoveisDokumen158 halamanManutencao e Reparos de Sistemas Eletricos de AutomoveisMiguel Torres100% (5)
- NBR 8221 Epi Capacete de Seguranca para Uso IndustrialDokumen18 halamanNBR 8221 Epi Capacete de Seguranca para Uso IndustrialEdgar Piai100% (1)
- Eletrodinamica EnemDokumen42 halamanEletrodinamica EnemAmanda XavierBelum ada peringkat
- VR B1802 VoyagerDokumen13 halamanVR B1802 VoyagerDirson Volmir WilligBelum ada peringkat
- Equipamentos - Telecobalto e Acelerador Linear PDFDokumen12 halamanEquipamentos - Telecobalto e Acelerador Linear PDFMarcelo MarcolinoBelum ada peringkat
- 02 Circuitos Elétricos 1 Aula 02 RogérioDokumen20 halaman02 Circuitos Elétricos 1 Aula 02 Rogérioantonio carlos bassoBelum ada peringkat
- 05 Fundamentos de Instalacoes Eletricas PDFDokumen86 halaman05 Fundamentos de Instalacoes Eletricas PDFFabiano De Oliveira Pires50% (2)
- Item 10.2.8.2 Ao 10.2.9.3 Da NR 10Dokumen2 halamanItem 10.2.8.2 Ao 10.2.9.3 Da NR 10Andressa Trindade100% (1)
- Sotreq Dim3516Dokumen126 halamanSotreq Dim3516Jose Carlos Fernandes0% (1)
- Manual Minipa 2552 1100 BRDokumen16 halamanManual Minipa 2552 1100 BRlestat_tiBelum ada peringkat
- Ciclotron Amplificador dbs4000Dokumen1 halamanCiclotron Amplificador dbs4000Gerson Watts eletrônicaBelum ada peringkat
- CTG502R-90 240VCA - P399 MultimedidorDokumen7 halamanCTG502R-90 240VCA - P399 MultimedidorJoao CarlosBelum ada peringkat
- Física - Pré-Vestibular Impacto - Geradores ElétricosDokumen2 halamanFísica - Pré-Vestibular Impacto - Geradores ElétricosFísica Qui100% (5)
- InstrumentaçãoDokumen31 halamanInstrumentaçãosilvio0% (1)
- Fisexp III - Aula 10 - UFRJDokumen9 halamanFisexp III - Aula 10 - UFRJwill31Belum ada peringkat
- Eletrotécnica: Exercícios Medição ResolvidosDokumen3 halamanEletrotécnica: Exercícios Medição ResolvidosLaura LauraBelum ada peringkat
- Trial Elétricos - Catálogo 2020Dokumen16 halamanTrial Elétricos - Catálogo 2020Trial ElétricosBelum ada peringkat