Anda mungkin juga menyukai
- Programacion MatLab Matematicas Avanzadas Segundo ParcialDokumen5 halamanProgramacion MatLab Matematicas Avanzadas Segundo ParcialErick_Alexander100% (1)
- Programacion MatLab Matematicas Avanzadas Primer ParcialDokumen8 halamanProgramacion MatLab Matematicas Avanzadas Primer ParcialErick_Alexander100% (1)
- Señales y Sistemas - OppenheimDokumen201 halamanSeñales y Sistemas - OppenheimErick_Alexander100% (7)
- Mont - Robotica SiguelineasDokumen4 halamanMont - Robotica SiguelineasEdwar LopezBelum ada peringkat
- Proyectos de ElectronicaDokumen110 halamanProyectos de ElectronicaErick_Alexander100% (1)
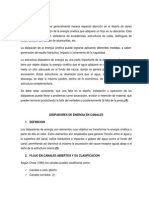
- Disipadores de Energia en CanalesDokumen23 halamanDisipadores de Energia en CanalesDeibyMijailRequenaMarcelo100% (2)
- Manual Electrónica Básica PDFDokumen48 halamanManual Electrónica Básica PDFosky1954trigoBelum ada peringkat
- Historia y Versiones ExcelDokumen26 halamanHistoria y Versiones ExcelRegulo Mendez100% (4)
- Tabla Rendimientos de Mano de ObraDokumen9 halamanTabla Rendimientos de Mano de Obraricardo841021Belum ada peringkat
- REPORTEMUSEODokumen5 halamanREPORTEMUSEOSalinas Hernández Karla YaninBelum ada peringkat
- El Proceso EstrategicoDokumen95 halamanEl Proceso EstrategicoorlandoBelum ada peringkat
- PASIVACIONDokumen13 halamanPASIVACIONAnonymous SghVMpBelum ada peringkat
- CARTA #018-2023 AMPLIACIÓN DE PLAZO Nro 02Dokumen3 halamanCARTA #018-2023 AMPLIACIÓN DE PLAZO Nro 02Michael Quispe BasilioBelum ada peringkat
- Caso Harvard 2Dokumen3 halamanCaso Harvard 2Luis0% (1)
- Creación de Reglas y Lista de Piezas para Una Red de Tuberías en CIVIL 3DDokumen10 halamanCreación de Reglas y Lista de Piezas para Una Red de Tuberías en CIVIL 3DEduard ZaldañäBelum ada peringkat
- Motor 1.9 - 2.2 16V JTSDokumen20 halamanMotor 1.9 - 2.2 16V JTSadrianvalde994Belum ada peringkat
- Presentación Ciacep - CiacepDokumen85 halamanPresentación Ciacep - CiacepJaime Alberto Flores PeñaBelum ada peringkat
- Talleres Cisco Unidad 3Dokumen9 halamanTalleres Cisco Unidad 3Mauricio SalazarBelum ada peringkat
- Documento PDF 2Dokumen8 halamanDocumento PDF 2Fernando ReynosoBelum ada peringkat
- Cantidad de Plantas en Una HectareaDokumen4 halamanCantidad de Plantas en Una HectareaStephen BurtonBelum ada peringkat
- Analisis Resultados Lavador VenturiDokumen1 halamanAnalisis Resultados Lavador VenturielianapaolaperezBelum ada peringkat
- H2 PVT Recombinacion PDFDokumen35 halamanH2 PVT Recombinacion PDFIvar Jonathan Espindola GudiñoBelum ada peringkat
- ILWISDokumen71 halamanILWISMich HuaynocaBelum ada peringkat
- Clase 8. Diseño de Mezcla de ConcretoDokumen51 halamanClase 8. Diseño de Mezcla de ConcretoEddie Jara SanchezBelum ada peringkat
- Herramientas CortantesDokumen1 halamanHerramientas Cortantesgabriela lizeth leon durandBelum ada peringkat
- Manual AA Modelos BS26WFCRBS26WCCRBS35WFCRBS35WCCRBS53WFCRBS45CPBS55CPDokumen28 halamanManual AA Modelos BS26WFCRBS26WCCRBS35WFCRBS35WCCRBS53WFCRBS45CPBS55CPAdrian GonzalezBelum ada peringkat
- Régimen Diurno Horario de Clases 0 Semestre Cinu Ingeniería Civil Sección 0S-1311-D1Dokumen24 halamanRégimen Diurno Horario de Clases 0 Semestre Cinu Ingeniería Civil Sección 0S-1311-D1lisbeth aularBelum ada peringkat
- Las Normas Electricas en El Cableado Estructurado - SiemonDokumen8 halamanLas Normas Electricas en El Cableado Estructurado - SiemonoespanaBelum ada peringkat
- Lab 8 - Flip Flop - RegistrosDokumen11 halamanLab 8 - Flip Flop - RegistrosBilly Markos Felix GutierrezBelum ada peringkat
- HG5840265Dokumen2 halamanHG5840265Crsthian Johan Riano Beltran100% (1)
- Unecreto Epoxi Estructural 1Dokumen4 halamanUnecreto Epoxi Estructural 1Javi CadenaBelum ada peringkat
- Terrado SuperiorDokumen3 halamanTerrado SuperiorsaunierduvalBelum ada peringkat
- Programacion de Videojuegos SDLDokumen19 halamanProgramacion de Videojuegos SDLAnonymous HPFUTT88% (8)
- Formatos NormalizadosDokumen8 halamanFormatos NormalizadosEdgar ContrerasBelum ada peringkat
- CapilaridadDokumen5 halamanCapilaridadSDollfie100% (1)