Anda mungkin juga menyukai
- Informe ElectivaDokumen1 halamanInforme ElectivaAlex ÑacataBelum ada peringkat
- Informe Comunicacion ProfibusDokumen5 halamanInforme Comunicacion ProfibusAlex ÑacataBelum ada peringkat
- Practica 10 ADokumen10 halamanPractica 10 AAlex ÑacataBelum ada peringkat
- Configuración de Registros para La Comunicación I2CDokumen6 halamanConfiguración de Registros para La Comunicación I2CAlex ÑacataBelum ada peringkat
- Apuntes de Estadistica - 1Dokumen120 halamanApuntes de Estadistica - 1Alex ÑacataBelum ada peringkat
- Problemas Sección BDokumen5 halamanProblemas Sección BRené ParedesBelum ada peringkat
- Redefinir La Vida Cristiana VictoriosaDokumen3 halamanRedefinir La Vida Cristiana VictoriosaHoracio AlcarazBelum ada peringkat
- Guia de Heridas UNAB. FinalDokumen41 halamanGuia de Heridas UNAB. FinalAntonia FuentealbaBelum ada peringkat
- ValknutDokumen2 halamanValknutMarcelo NóbregaBelum ada peringkat
- Circuito Productivo Del VinoDokumen30 halamanCircuito Productivo Del VinoRashel ThomasBelum ada peringkat
- Guia Artes VisualesDokumen5 halamanGuia Artes VisualesAlex BustosBelum ada peringkat
- Rock Uruguayo. Fernando UliviDokumen4 halamanRock Uruguayo. Fernando Ulivimorgan385Belum ada peringkat
- Guia Autonoma - 2Dokumen5 halamanGuia Autonoma - 2Gislaynne GJBelum ada peringkat
- Litu. Las Troyanas Adaptado. EuripidesDokumen26 halamanLitu. Las Troyanas Adaptado. EuripidesSilvana DominguezBelum ada peringkat
- Lista de Menaje TODOS LOS AÑOSDokumen8 halamanLista de Menaje TODOS LOS AÑOSandres herreraBelum ada peringkat
- Caso George FloydDokumen4 halamanCaso George FloydBrisa SaavedraBelum ada peringkat
- Ensayo Cesar VallejoDokumen4 halamanEnsayo Cesar VallejomoniqueBelum ada peringkat
- Plano AlturasDokumen1 halamanPlano AlturasJeyson Duván López Castillo100% (1)
- Mi Identidad Como Docente (Ensayo)Dokumen5 halamanMi Identidad Como Docente (Ensayo)Angel JairBelum ada peringkat
- Capitulo 1Dokumen21 halamanCapitulo 1Christian Augusto100% (1)
- Victorinox Cuchillos PDFDokumen52 halamanVictorinox Cuchillos PDFccperezor8Belum ada peringkat
- Tablas para Ajustes y ToleranciasDokumen12 halamanTablas para Ajustes y Toleranciasleonel fernandezBelum ada peringkat
- Examen Final CapacitacionDokumen2 halamanExamen Final CapacitacionFelipe Lesmes CorreaBelum ada peringkat
- Articulos CientificosDokumen19 halamanArticulos CientificosCamilo Cayapur SilvaBelum ada peringkat
- Infografia Etica EmpresarialDokumen4 halamanInfografia Etica Empresarialyina fernandez gilBelum ada peringkat
- La Informática y La Educación InicialDokumen5 halamanLa Informática y La Educación InicialKirsy Johanna Pérez MejíaBelum ada peringkat
- Viento Rep 04Dokumen9 halamanViento Rep 04Carmen MosqueraBelum ada peringkat
- Reconsideracion Essalud..Dokumen3 halamanReconsideracion Essalud..xiomara pamela0% (1)
- Clase 1 Introduccion A La Gastronomia Historia y Evolucion de La Cocina Terminos y Principios Basicos de La GastronomiaDokumen20 halamanClase 1 Introduccion A La Gastronomia Historia y Evolucion de La Cocina Terminos y Principios Basicos de La GastronomiaMafer Zaid25% (4)
- Pedagogia Del SillpanchoDokumen2 halamanPedagogia Del SillpanchoEdwin Gustavo Layme MareñoBelum ada peringkat
- Aspectos Teoricos Del Abuso Sexual Infantil (1) .PpsDokumen20 halamanAspectos Teoricos Del Abuso Sexual Infantil (1) .PpsDiana LoaizaBelum ada peringkat
- Reconocimiento Judicial de Embarazo - SilviaDokumen3 halamanReconocimiento Judicial de Embarazo - SilviaCarmen Melgar O̲̲̅̅f̲̲̅̅ı̲̲̅̅c̲̲̅̅ı̲̲̅̅a̲̲̅̅l̲FbBelum ada peringkat
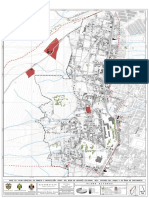
- Diagnostico Plan UrbanoDokumen87 halamanDiagnostico Plan UrbanoLizethDelRosarioSotoCardenasBelum ada peringkat
- Diagrama de Flujo Panque de ZanahoriaDokumen1 halamanDiagrama de Flujo Panque de ZanahoriaSugey de Omar100% (1)
- Biomas OceanicosDokumen5 halamanBiomas OceanicosLismar SulbaranBelum ada peringkat