Anda mungkin juga menyukai
- Quality Standards For ECCE INDIA PDFDokumen41 halamanQuality Standards For ECCE INDIA PDFMaryam Ben100% (4)
- FEMA E-74 Reducing The Risks of Nonstructural Earthquake DamageDokumen885 halamanFEMA E-74 Reducing The Risks of Nonstructural Earthquake DamageManolis Michelakis100% (1)
- Seismic Performance of Shear Wall Buildings With Gravity-Induced Lateral DemandsDokumen19 halamanSeismic Performance of Shear Wall Buildings With Gravity-Induced Lateral DemandsMREFAATBelum ada peringkat
- EN - 1993-1-1 (2022) - (E) - CópiaDokumen9 halamanEN - 1993-1-1 (2022) - (E) - CópiaHugNitBelum ada peringkat
- Trapezoidal Sheet As A Bracing Preventing Flat Trusses From Out-Of-Plane BucklingDokumen7 halamanTrapezoidal Sheet As A Bracing Preventing Flat Trusses From Out-Of-Plane BucklingWilliam Pol100% (1)
- RAM Connection Verification ManualDokumen85 halamanRAM Connection Verification ManualI'm LuongBelum ada peringkat
- Load Bearing Capacity Analysis of Collapsed Maxima Shopping Center TrussesDokumen11 halamanLoad Bearing Capacity Analysis of Collapsed Maxima Shopping Center TrusseshoojzteBelum ada peringkat
- Eccentric FootingDokumen3 halamanEccentric FootingVarunn VelBelum ada peringkat
- A Distribution Procedure For The Analysis of Slabs Continuous Over Flexible Beams Newmark, N.M.Dokumen126 halamanA Distribution Procedure For The Analysis of Slabs Continuous Over Flexible Beams Newmark, N.M.Marimari MinteaBelum ada peringkat
- ETAG 001-Annex C 10-08-01Dokumen34 halamanETAG 001-Annex C 10-08-01jpjobduBelum ada peringkat
- VSL Stay Cable Systems Technical Catalogue - 2018 12Dokumen37 halamanVSL Stay Cable Systems Technical Catalogue - 2018 12Jasony PadasianBelum ada peringkat
- Asic Steel and Wrought Iron Columns)Dokumen145 halamanAsic Steel and Wrought Iron Columns)Bj Cody50% (2)
- A Method of Analysis For Infilled Frames - Smith - 1969Dokumen18 halamanA Method of Analysis For Infilled Frames - Smith - 1969ravi100% (1)
- Enlaces Libros de PuentesDokumen4 halamanEnlaces Libros de PuentesJose CiprianBelum ada peringkat
- Geometric Properties of Hot-Rolled Steel Angles Including The Effects of Toe Radii and FilletDokumen10 halamanGeometric Properties of Hot-Rolled Steel Angles Including The Effects of Toe Radii and FilletDianna Lambert100% (1)
- Stay CableDokumen12 halamanStay CablescribdsimileBelum ada peringkat
- Use of Shear Lugs For Anchorage To Concrete: January 2009Dokumen9 halamanUse of Shear Lugs For Anchorage To Concrete: January 2009Sandeep BhatiaBelum ada peringkat
- Hit-Re 500 With Hit-V Has RodsDokumen3 halamanHit-Re 500 With Hit-V Has RodsMKBelum ada peringkat
- Priestley-Grant - 2005 - Viscous Damping in Seismic Design and AnalysisDokumen27 halamanPriestley-Grant - 2005 - Viscous Damping in Seismic Design and AnalysisLessly Jeniffer Rivera AvalosBelum ada peringkat
- Ns26 1 Connection Design Handout 4perDokumen25 halamanNs26 1 Connection Design Handout 4perHectorBelum ada peringkat
- Diaphragm Design Manual: FOURTH EDITION - First PrintingDokumen1 halamanDiaphragm Design Manual: FOURTH EDITION - First Printingaandueza_1Belum ada peringkat
- Numerical Analysis of Composite Steel-Concrete Columns of Arbitrary Cross SectionDokumen10 halamanNumerical Analysis of Composite Steel-Concrete Columns of Arbitrary Cross SectionNasar KhanBelum ada peringkat
- Deformed and Plain Low-Alloy Steel Bars For Concrete ReinforcementDokumen7 halamanDeformed and Plain Low-Alloy Steel Bars For Concrete Reinforcementjose moralesBelum ada peringkat
- 318-19 Errata ConsolidatedDokumen7 halaman318-19 Errata ConsolidatedCarsonBakerBelum ada peringkat
- Tubular Structures PDFDokumen101 halamanTubular Structures PDFAlex100% (1)
- Seismic Design of Multi-Tiered Steel Braced Frames Including The Contribution From Gravity ColumnsDokumen21 halamanSeismic Design of Multi-Tiered Steel Braced Frames Including The Contribution From Gravity ColumnsDiego Matias Burgos FuentesBelum ada peringkat
- Etag 001 - TR045 - 2013 - 02 PDFDokumen16 halamanEtag 001 - TR045 - 2013 - 02 PDF0paulo0Belum ada peringkat
- Q 6. Earthquakes - 4th Edition, Bruce ADokumen2 halamanQ 6. Earthquakes - 4th Edition, Bruce ABobby WskBelum ada peringkat
- TechnicalSplices PDFDokumen3 halamanTechnicalSplices PDFengineer_atulBelum ada peringkat
- Shock Transmission Units For Bridges - IndiaDokumen3 halamanShock Transmission Units For Bridges - IndiamitnathBelum ada peringkat
- Thomas and Hsu Shear Flow Zone in Torsion of RC MemberDokumen21 halamanThomas and Hsu Shear Flow Zone in Torsion of RC Memberyyanan1118100% (1)
- The Analysis and Design of and The Evaluation of Design Actions For Reinforced Concrete Ductile Shear Wall StructuresDokumen36 halamanThe Analysis and Design of and The Evaluation of Design Actions For Reinforced Concrete Ductile Shear Wall StructuresmamandaweBelum ada peringkat
- Distortional BucklingDokumen16 halamanDistortional BucklingadnanmominBelum ada peringkat
- Concrete Jacket Construction Detail Effectiveness When Strengthening RC ColumnsDokumen13 halamanConcrete Jacket Construction Detail Effectiveness When Strengthening RC ColumnsAbhishek ShatagopachariBelum ada peringkat
- Iso 262 - 1998 (E)Dokumen7 halamanIso 262 - 1998 (E)john_progecoBelum ada peringkat
- Simple Procedure For Seismic Analysis of Seismic TanksDokumen6 halamanSimple Procedure For Seismic Analysis of Seismic TanksMuhammad Usman100% (1)
- Strut-and-Tie Model Analysis/Design of Structural ConcreteDokumen2 halamanStrut-and-Tie Model Analysis/Design of Structural ConcreteShishir Kumar NayakBelum ada peringkat
- Kang 2018Dokumen11 halamanKang 2018joeBelum ada peringkat
- Vox StomplabDokumen8 halamanVox StomplabGuilherme AlvesBelum ada peringkat
- Design ExampleDokumen4 halamanDesign ExampleEngr Sher KhanBelum ada peringkat
- Sudden Collapse of The 27-Story Space Building in Medellin, Colombia, Yamin Et Al 2018Dokumen13 halamanSudden Collapse of The 27-Story Space Building in Medellin, Colombia, Yamin Et Al 2018Tránsito SUDEN SASBelum ada peringkat
- AISC Engineering Journal Q1 2010Dokumen76 halamanAISC Engineering Journal Q1 2010albertoxinaBelum ada peringkat
- Design of Pallet Rack Upright Frames Subject To CompressionDokumen107 halamanDesign of Pallet Rack Upright Frames Subject To CompressionssierroBelum ada peringkat
- CatenaryDokumen8 halamanCatenaryMary MarasiganBelum ada peringkat
- Shear in One-Way Slabs Under Concentrate PDFDokumen10 halamanShear in One-Way Slabs Under Concentrate PDFHesham MohamedBelum ada peringkat
- Codification of Precast Seismic Structural Systems: An UpdateDokumen4 halamanCodification of Precast Seismic Structural Systems: An Updateamirsh78Belum ada peringkat
- Halfen Systems For The Support and Restraint of BrickworkDokumen8 halamanHalfen Systems For The Support and Restraint of BrickworkvtalexBelum ada peringkat
- Risa Base Plate ExampleDokumen2 halamanRisa Base Plate ExampleFandy SipataBelum ada peringkat
- ANSYS Modal AnalysisDokumen40 halamanANSYS Modal Analysismbreuking6943Belum ada peringkat
- NA To Sls en 1993-1-3Dokumen12 halamanNA To Sls en 1993-1-3Shan Sandaruwan AbeywardeneBelum ada peringkat
- Analysis and Design of SlabsDokumen19 halamanAnalysis and Design of SlabsBriones GogocBelum ada peringkat
- Standard For Steel Roof Deck: CSSBI 10M - 08 October 2008Dokumen8 halamanStandard For Steel Roof Deck: CSSBI 10M - 08 October 2008Anonymous P73cUg73LBelum ada peringkat
- Galambos 2001 Q2Dokumen13 halamanGalambos 2001 Q2bobmarley20161934Belum ada peringkat
- Lúcio, V.J.G. Silva, A.M.S. "Design Models For Footings of Precast Concrete Structures" The Second International Symposium On Prefabrication, Helsínquia, 2000.Dokumen6 halamanLúcio, V.J.G. Silva, A.M.S. "Design Models For Footings of Precast Concrete Structures" The Second International Symposium On Prefabrication, Helsínquia, 2000.Válter LúcioBelum ada peringkat
- A Comparative Study LTB Using AISC EC and SPDokumen8 halamanA Comparative Study LTB Using AISC EC and SPvodugu123Belum ada peringkat
- Gusset Plate Connection To Round HSS Tension MembersDokumen7 halamanGusset Plate Connection To Round HSS Tension MembersSergioAlcantaraBelum ada peringkat
- ACI 445R-99: Reported by Joint ACI-ASCE Committee 445Dokumen55 halamanACI 445R-99: Reported by Joint ACI-ASCE Committee 445Jimmy Tien TrinhBelum ada peringkat
- Plate and Shell Structures: Selected Analytical and Finite Element SolutionsDari EverandPlate and Shell Structures: Selected Analytical and Finite Element SolutionsPenilaian: 5 dari 5 bintang5/5 (1)
- JL 84 March April 5Dokumen70 halamanJL 84 March April 5Christopher Joshua MartinezBelum ada peringkat
- (Asce) 0733-9445 (1998) 124 12 (1375)Dokumen43 halaman(Asce) 0733-9445 (1998) 124 12 (1375)sepehrBelum ada peringkat
- Manualwise: Braced For Better Seismic DesignDokumen5 halamanManualwise: Braced For Better Seismic Designalberto rosadoBelum ada peringkat
- Leseprobe Design of Steel Plated Structures With Finite ElementsDokumen19 halamanLeseprobe Design of Steel Plated Structures With Finite ElementsWang MaxBelum ada peringkat
- Analytical MethodDokumen10 halamanAnalytical MethodCHERUKURU BALA VENKATA HAREENBelum ada peringkat
- Plastic Theory of Bending - Materials - Engg Reference With Worked ExamplesDokumen9 halamanPlastic Theory of Bending - Materials - Engg Reference With Worked ExampleshoojzteBelum ada peringkat
- EBBEF2p-A Computer Code For Analyzing Beams On Elastic FoundationsDokumen18 halamanEBBEF2p-A Computer Code For Analyzing Beams On Elastic FoundationshoojzteBelum ada peringkat
- Lehigh U - Elastic-Plastic Analysis of Frames - Including Axial Force EffectDokumen101 halamanLehigh U - Elastic-Plastic Analysis of Frames - Including Axial Force EffecthoojzteBelum ada peringkat
- 19 6 381Dokumen12 halaman19 6 381Amnee HalimBelum ada peringkat
- UE Guide Directive Machine 2006-42-CEDokumen406 halamanUE Guide Directive Machine 2006-42-CEvoltaredBelum ada peringkat
- 19 6 381Dokumen12 halaman19 6 381Amnee HalimBelum ada peringkat
- Buckling Behaviour of Steel Truss-WongjeeraphatDokumen16 halamanBuckling Behaviour of Steel Truss-WongjeeraphathoojzteBelum ada peringkat
- Guide To Application of The Lifts Directive 2014-33Dokumen193 halamanGuide To Application of The Lifts Directive 2014-33hoojzteBelum ada peringkat
- MUST - Plastic Analysis of Beam-ColumnsDokumen71 halamanMUST - Plastic Analysis of Beam-ColumnshoojzteBelum ada peringkat
- 2005S Reliability & SFDokumen6 halaman2005S Reliability & SFhoojzteBelum ada peringkat
- Hydraulic Elevators-Their Design, Constrn, Oper, Care & Management - William BaxterDokumen341 halamanHydraulic Elevators-Their Design, Constrn, Oper, Care & Management - William BaxterhoojzteBelum ada peringkat
- Tower ListDokumen2 halamanTower ListhoojzteBelum ada peringkat
- Lehigh U - Elastic-Plastic Analysis of Frames - Including Axial Force EffectDokumen101 halamanLehigh U - Elastic-Plastic Analysis of Frames - Including Axial Force EffecthoojzteBelum ada peringkat
- Influence LinesDokumen1 halamanInfluence LineshoojzteBelum ada peringkat
- APA Rated Sheathing & Structural 1 Sheathing-LP OSBDokumen5 halamanAPA Rated Sheathing & Structural 1 Sheathing-LP OSBhoojzteBelum ada peringkat
- Long SpanDokumen113 halamanLong SpanHasan KazimBelum ada peringkat
- SEED-Specify and Choose An Electric MotorDokumen12 halamanSEED-Specify and Choose An Electric MotorhoojzteBelum ada peringkat
- 2 D StressesDokumen17 halaman2 D StressesYo_RocksBelum ada peringkat
- 3 DStressesDokumen18 halaman3 DStresseseulerintegral100% (1)
- Tower ListDokumen2 halamanTower ListhoojzteBelum ada peringkat
- Tower ListDokumen2 halamanTower ListhoojzteBelum ada peringkat
- Tower ListDokumen2 halamanTower ListhoojzteBelum ada peringkat
- Influence LinesDokumen1 halamanInfluence LineshoojzteBelum ada peringkat
- Influence LinesDokumen1 halamanInfluence LineshoojzteBelum ada peringkat
- Tower ListDokumen2 halamanTower ListhoojzteBelum ada peringkat
- Simple Rod ProblemDokumen22 halamanSimple Rod ProblemhoojzteBelum ada peringkat
- 12 Step Worksheet With QuestionsDokumen26 halaman12 Step Worksheet With QuestionsKristinDaigleBelum ada peringkat
- HRM Practices in NepalDokumen22 halamanHRM Practices in NepalBodhiBelum ada peringkat
- AYUMJADokumen1 halamanAYUMJASoumet Das SoumetBelum ada peringkat
- Prediction of Compressive Strength of Research PaperDokumen9 halamanPrediction of Compressive Strength of Research PaperTaufik SheikhBelum ada peringkat
- TM Mic Opmaint EngDokumen186 halamanTM Mic Opmaint Engkisedi2001100% (2)
- CM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletDokumen2 halamanCM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletJames HookBelum ada peringkat
- DLP English 10 AIRADokumen8 halamanDLP English 10 AIRAMae Mallapre100% (1)
- Daftar ObatDokumen18 halamanDaftar Obatyuyun hanakoBelum ada peringkat
- Industrial ReportDokumen52 halamanIndustrial ReportSiddharthBelum ada peringkat
- Vetoset CA541: Thickbed Cementitious Tile AdhesiveDokumen2 halamanVetoset CA541: Thickbed Cementitious Tile Adhesivemus3b1985Belum ada peringkat
- Board of Technical Education (Student Marksheet)Dokumen2 halamanBoard of Technical Education (Student Marksheet)Manoj SainiBelum ada peringkat
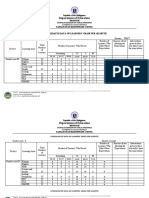
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDokumen4 halamanDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaBelum ada peringkat
- Nominal GroupDokumen3 halamanNominal GroupSrourBelum ada peringkat
- Đề Tuyển Sinh Lớp 10 Môn Tiếng AnhDokumen11 halamanĐề Tuyển Sinh Lớp 10 Môn Tiếng AnhTrangBelum ada peringkat
- Plan Lectie Clasa 5 D HaineDokumen5 halamanPlan Lectie Clasa 5 D HaineCristina GrapinoiuBelum ada peringkat
- 5steps To Finding Your Workflow: by Nathan LozeronDokumen35 halaman5steps To Finding Your Workflow: by Nathan Lozeronrehabbed100% (2)
- Title: Smart Monitoring & Control of Electrical Distribution System Using IOTDokumen27 halamanTitle: Smart Monitoring & Control of Electrical Distribution System Using IOTwaleed HaroonBelum ada peringkat
- Halloween EssayDokumen2 halamanHalloween EssayJonathan LamBelum ada peringkat
- Blackberry: Terms of Use Find Out MoreDokumen21 halamanBlackberry: Terms of Use Find Out MoreSonu SarswatBelum ada peringkat
- Aristotle - OCR - AS Revision NotesDokumen3 halamanAristotle - OCR - AS Revision NotesAmelia Dovelle0% (1)
- Chapter 2 Short-Term SchedulingDokumen49 halamanChapter 2 Short-Term SchedulingBOUAZIZ LINABelum ada peringkat
- Pitch DeckDokumen21 halamanPitch DeckIABelum ada peringkat
- Installing Surge Protective Devices With NEC Article 240 and Feeder Tap RuleDokumen2 halamanInstalling Surge Protective Devices With NEC Article 240 and Feeder Tap RuleJonathan Valverde RojasBelum ada peringkat
- Statistical Process Control and Process Capability PPT EXPLANATIONDokumen2 halamanStatistical Process Control and Process Capability PPT EXPLANATIONJohn Carlo SantiagoBelum ada peringkat
- Ultra Electronics Gunfire LocatorDokumen10 halamanUltra Electronics Gunfire LocatorPredatorBDU.comBelum ada peringkat
- بتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Dokumen5 halamanبتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Batool MagedBelum ada peringkat
- Tomb of Archimedes (Sources)Dokumen3 halamanTomb of Archimedes (Sources)Petro VourisBelum ada peringkat
- Press Statement - Book Launching Shariah Forensic 27 Oct 2023Dokumen4 halamanPress Statement - Book Launching Shariah Forensic 27 Oct 2023aBelum ada peringkat