Anda mungkin juga menyukai
- Why File A Ucc1Dokumen10 halamanWhy File A Ucc1kbarn389100% (4)
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesDari EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesPenilaian: 4.5 dari 5 bintang4.5/5 (7)
- Session-3 Distribution NetworkDokumen28 halamanSession-3 Distribution NetworkChristos Apostolopoulos100% (1)
- Basic Protection and Relaying SchemesDokumen58 halamanBasic Protection and Relaying SchemesputrasejahtraBelum ada peringkat
- Grade 9 WorkbookDokumen44 halamanGrade 9 WorkbookMaria Russeneth Joy NaloBelum ada peringkat
- Generator Protection Functions and Test Methods (Autosaved) Collection UnzipDokumen22 halamanGenerator Protection Functions and Test Methods (Autosaved) Collection UnzipSandeep Kumar Krishnaraj100% (1)
- Transformer Protection Calculations PDFDokumen44 halamanTransformer Protection Calculations PDFngocanhvyBelum ada peringkat
- LM2TB8 2018 (Online)Dokumen252 halamanLM2TB8 2018 (Online)SandhirBelum ada peringkat
- 345 - OTHER-Relay SettingsDokumen2 halaman345 - OTHER-Relay SettingsRuchir Bhoglekar100% (1)
- Building A Pentesting Lab For Wireless Networks - Sample ChapterDokumen29 halamanBuilding A Pentesting Lab For Wireless Networks - Sample ChapterPackt PublishingBelum ada peringkat
- Proposal Setting MiCOMP443 - OHL - KEFAMENANU - F21 - New - ImpedanceDokumen9 halamanProposal Setting MiCOMP443 - OHL - KEFAMENANU - F21 - New - ImpedanceNurul MukhlisiahBelum ada peringkat
- Lec8 Numerical Distance ProtectionDokumen24 halamanLec8 Numerical Distance ProtectionEVTBelum ada peringkat
- Introduction To HVDC Subsea Cables 16 July 2012Dokumen20 halamanIntroduction To HVDC Subsea Cables 16 July 2012Christos ApostolopoulosBelum ada peringkat
- How To Use IEC 61850 in Protection and AutomationDokumen11 halamanHow To Use IEC 61850 in Protection and AutomationluhusapaBelum ada peringkat
- Adime 2Dokumen10 halamanAdime 2api-307103979Belum ada peringkat
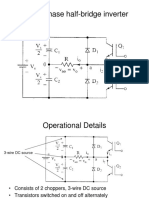
- Single Phase Half Bridge InverterDokumen29 halamanSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- Detailed Modeling of CIGRÉ HVDC Benchmark System Using PSCADEMTDC and PSBSIMULINKDokumen10 halamanDetailed Modeling of CIGRÉ HVDC Benchmark System Using PSCADEMTDC and PSBSIMULINKArturo Isidro Conde PérezBelum ada peringkat
- Selection of Current Transformers and Wire Sizing in SubstationsDokumen10 halamanSelection of Current Transformers and Wire Sizing in SubstationsChristos ApostolopoulosBelum ada peringkat
- Distance ProtectionDokumen36 halamanDistance ProtectionEddie PazosBelum ada peringkat
- Fundamentals of Distance Protection: Conference PaperDokumen36 halamanFundamentals of Distance Protection: Conference PaperShahnawaz AhmadBelum ada peringkat
- 01 Dist BasicsDokumen22 halaman01 Dist BasicsAshok KumarBelum ada peringkat
- Three Zone Distance Protection of Transmission Line: March 2019Dokumen8 halamanThree Zone Distance Protection of Transmission Line: March 2019shakeralhyaneBelum ada peringkat
- Exercise 1 - Load Flow and Short CircuitDokumen4 halamanExercise 1 - Load Flow and Short CircuitCRISTIAN CAMILO MORALES SOLISBelum ada peringkat
- Calculation and Setting of Relays in Transmission Overhead Lines M. Špes, Ľ. Beňa, M. MikitaDokumen7 halamanCalculation and Setting of Relays in Transmission Overhead Lines M. Špes, Ľ. Beňa, M. MikitaUrfan AshrafBelum ada peringkat
- Proteccionnes LDokumen685 halamanProteccionnes LDarwinPeñafielBelum ada peringkat
- High-Accuracy Readout Electronics For Piezoresistive Tactile SensorsDokumen12 halamanHigh-Accuracy Readout Electronics For Piezoresistive Tactile SensorsMallikarjuna KorrapatiBelum ada peringkat
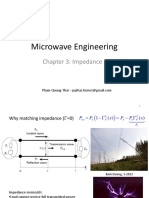
- Microwave Engineering: Chapter 3: Impedance MatchingDokumen19 halamanMicrowave Engineering: Chapter 3: Impedance MatchingLê NamBelum ada peringkat
- Induction Motor 2003Dokumen24 halamanInduction Motor 2003hdrzaman9439Belum ada peringkat
- Semiconductor: 225 MW SOT-23 Zener Voltage Regulator DiodesDokumen5 halamanSemiconductor: 225 MW SOT-23 Zener Voltage Regulator DiodesStuxnetBelum ada peringkat
- Opendss Tech Note Distance Relays: K Z Z Z I I I I Z Vi Ki Z VV I IDokumen6 halamanOpendss Tech Note Distance Relays: K Z Z Z I I I I Z Vi Ki Z VV I ILeonardo LeonBelum ada peringkat
- G. Transmission LineDokumen16 halamanG. Transmission LineJosBelum ada peringkat
- Chapter 13 Oscillators and MixersDokumen23 halamanChapter 13 Oscillators and MixersBảo BìnhBelum ada peringkat
- Lab 5 Field Effect Transistors: 1. Junction FET Characteristic CurvesDokumen5 halamanLab 5 Field Effect Transistors: 1. Junction FET Characteristic CurvesAhmed SalehBelum ada peringkat
- مثال لحسلب تيار دوار في لمحولاتDokumen5 halamanمثال لحسلب تيار دوار في لمحولاتحسن هاديBelum ada peringkat
- Analog Sample Interview QuestionsDokumen30 halamanAnalog Sample Interview QuestionsSampoornaGonellaBelum ada peringkat
- Comparing Primary and Secondary Ohms and Converting To Per Unit On Secondary When CTR and VTR Don't Cancel-L4Dokumen3 halamanComparing Primary and Secondary Ohms and Converting To Per Unit On Secondary When CTR and VTR Don't Cancel-L4Ahmed RabaaBelum ada peringkat
- Telefono l3240b Twotone RingerDokumen6 halamanTelefono l3240b Twotone Ringerblackbeast79Belum ada peringkat
- Distance Protection For Transmission Lines: Part 1: Power Transmission and DistributionDokumen12 halamanDistance Protection For Transmission Lines: Part 1: Power Transmission and Distributionkjan8899Belum ada peringkat
- TechRef 2 W Transformer SinglePhaseDokumen12 halamanTechRef 2 W Transformer SinglePhaseromulanecBelum ada peringkat
- Transfer Fundtion of DC GeneratorDokumen5 halamanTransfer Fundtion of DC GeneratorMohammad Haris MBelum ada peringkat
- TL Theory L 3 29 08Dokumen29 halamanTL Theory L 3 29 08AAKASH GUPTABelum ada peringkat
- PDO Course 2Dokumen67 halamanPDO Course 21MM1R HL'Belum ada peringkat
- S6L1D-D4 Wdg.13/14 - Technical Data SheetDokumen9 halamanS6L1D-D4 Wdg.13/14 - Technical Data SheetElias Abou FakhrBelum ada peringkat
- Electronics Ii: Engr. Ryann AlimuinDokumen162 halamanElectronics Ii: Engr. Ryann AlimuinJulius RicardeBelum ada peringkat
- Experiment No. 8 A) Date: Single Phase Half Wave RectifierDokumen25 halamanExperiment No. 8 A) Date: Single Phase Half Wave RectifierSAGAR CHAVAN (RA2111003010818)Belum ada peringkat
- Ag2000-12 20170214Dokumen26 halamanAg2000-12 20170214cheloniaqBelum ada peringkat
- Homework Assignment No. 1: MOSFET Parameter N-Channel P-Channel UnitsDokumen4 halamanHomework Assignment No. 1: MOSFET Parameter N-Channel P-Channel UnitsThippeswamy LBelum ada peringkat
- Bypass Capacitors Part3Dokumen5 halamanBypass Capacitors Part3Tomasz PBelum ada peringkat
- CADAM2009 Numerical Simulation of Distance Protection On Three Terminal High Voltage Transmission LinesDokumen14 halamanCADAM2009 Numerical Simulation of Distance Protection On Three Terminal High Voltage Transmission Linesrian0201Belum ada peringkat
- Microwave Components and Circuits: Course Code: ECPC 25Dokumen31 halamanMicrowave Components and Circuits: Course Code: ECPC 25Sai Anirudh SanagaramBelum ada peringkat
- Espectroscopia de Impedancia Electroquimica (Eie)Dokumen23 halamanEspectroscopia de Impedancia Electroquimica (Eie)Ronald BustamanteBelum ada peringkat
- Chapter 3 Optical Components in Silicon PhotonicsDokumen179 halamanChapter 3 Optical Components in Silicon PhotonicsTruthera AndalusiaBelum ada peringkat
- Electrcic Circuit Lab4Dokumen6 halamanElectrcic Circuit Lab4E24106610許翰翔Belum ada peringkat
- General Purpose Transistor (Isolated Transistor and Diode) : TransistorsDokumen5 halamanGeneral Purpose Transistor (Isolated Transistor and Diode) : TransistorsAmanda BentoBelum ada peringkat
- Unisonic Technologies Co., LTD: General Purpose, Low Voltage, Rail-To-Rail Output Operational AmplifiersDokumen12 halamanUnisonic Technologies Co., LTD: General Purpose, Low Voltage, Rail-To-Rail Output Operational AmplifiersJonathan NuñezBelum ada peringkat
- Example 7: D Firas Mohamme Dr. Power Year Electrical 4Dokumen15 halamanExample 7: D Firas Mohamme Dr. Power Year Electrical 4Ahmad AliBelum ada peringkat
- 1PH Half Bridge InverterDokumen31 halaman1PH Half Bridge InvertertintuvrBelum ada peringkat
- DF2S5.6FS Datasheet en 20140709Dokumen7 halamanDF2S5.6FS Datasheet en 20140709Jose CarrasquelBelum ada peringkat
- Settings For Line Protection: ABB Automation Technology Products AB Västerås SwedenDokumen7 halamanSettings For Line Protection: ABB Automation Technology Products AB Västerås SwedenMohamed RabeiBelum ada peringkat
- Fast Recovery Diodes: RF2001T3DDokumen6 halamanFast Recovery Diodes: RF2001T3DEncontre ElrepuestoBelum ada peringkat
- Circuit Topologies & Analysis Techniques in HF IcsDokumen49 halamanCircuit Topologies & Analysis Techniques in HF IcsRao MallikarjunBelum ada peringkat
- 3ph Induction Mc-Te, MaxDokumen6 halaman3ph Induction Mc-Te, MaxMd Moinul Alom ShovonBelum ada peringkat
- Transistor 2021 Pag 2Dokumen5 halamanTransistor 2021 Pag 2StuxnetBelum ada peringkat
- Hitachi - PDE MDM900E17D 5Dokumen8 halamanHitachi - PDE MDM900E17D 5mSmallBelum ada peringkat
- Induction Motor PDFDokumen26 halamanInduction Motor PDFishak789100% (1)
- Performance Analysis of 33 11kv Substation and Its FeedersDokumen6 halamanPerformance Analysis of 33 11kv Substation and Its FeedersShivang LowanshiBelum ada peringkat
- Niko-Sem: 0.8A Fixed and Adjustable Low Dropout Linear Regulator (LDO)Dokumen6 halamanNiko-Sem: 0.8A Fixed and Adjustable Low Dropout Linear Regulator (LDO)Lite HhhBelum ada peringkat
- 電路ch13b Magnetically Coupled Circuits 2Dokumen38 halaman電路ch13b Magnetically Coupled Circuits 2luoaier1016Belum ada peringkat
- RFMW Mid Sem 2020Dokumen2 halamanRFMW Mid Sem 2020Akshaya MushiniBelum ada peringkat
- Radial Distribution Test FeedersDokumen6 halamanRadial Distribution Test FeedersChristos ApostolopoulosBelum ada peringkat
- Influence of Transformer Tap-Changer Control Mode Upon HVDC Valve Power LossDokumen4 halamanInfluence of Transformer Tap-Changer Control Mode Upon HVDC Valve Power LossChristos ApostolopoulosBelum ada peringkat
- One 2Dokumen1 halamanOne 2Christos ApostolopoulosBelum ada peringkat
- Distributed Load DataDokumen1 halamanDistributed Load DataChristos ApostolopoulosBelum ada peringkat
- 2 - 2 Mid-Line Fault Calculations PDFDokumen9 halaman2 - 2 Mid-Line Fault Calculations PDFblaagicaBelum ada peringkat
- PDFDokumen8 halamanPDFChristos ApostolopoulosBelum ada peringkat
- Electric Power Systems Research: H. Saad, P. Rault, S. DennetièreDokumen3 halamanElectric Power Systems Research: H. Saad, P. Rault, S. DennetièreChristos ApostolopoulosBelum ada peringkat
- Line DataDokumen1 halamanLine DataChristos ApostolopoulosBelum ada peringkat
- HVDC Light Modeling For Dynamic Performance AnalysisDokumen6 halamanHVDC Light Modeling For Dynamic Performance AnalysisChristos ApostolopoulosBelum ada peringkat
- MMC Webinar For Release 2015-02-16Dokumen55 halamanMMC Webinar For Release 2015-02-16qais652002100% (1)
- 6668 LossEffective DD 20150318 WebDokumen9 halaman6668 LossEffective DD 20150318 WebChristos ApostolopoulosBelum ada peringkat
- Energies 07 08116Dokumen16 halamanEnergies 07 08116velkan242Belum ada peringkat
- Teleprotection TripDokumen17 halamanTeleprotection TripChristos ApostolopoulosBelum ada peringkat
- GC0090: HVDC - Fault Ride Through: Antony Johnson / Ben Marshall National Grid - Network CapabilityDokumen59 halamanGC0090: HVDC - Fault Ride Through: Antony Johnson / Ben Marshall National Grid - Network CapabilityChristos ApostolopoulosBelum ada peringkat
- Second Floor-1 PDFDokumen1 halamanSecond Floor-1 PDFChristos ApostolopoulosBelum ada peringkat
- CleanLinePt2 Appendix 10 JDokumen233 halamanCleanLinePt2 Appendix 10 JChristos ApostolopoulosBelum ada peringkat
- Application Fields and Control Principles of Variable Shunt Reactors With Tap-Changer (Chalmers) PDFDokumen93 halamanApplication Fields and Control Principles of Variable Shunt Reactors With Tap-Changer (Chalmers) PDFdes19820% (1)
- Aromatic Network: A Novel Structure For Power Distribution SystemDokumen22 halamanAromatic Network: A Novel Structure For Power Distribution SystemChristos ApostolopoulosBelum ada peringkat
- Investigating Particularities of Infeed and Fault Resistance Effect On Distance Relays Protecting Radial Distribution Feeders With DGDokumen12 halamanInvestigating Particularities of Infeed and Fault Resistance Effect On Distance Relays Protecting Radial Distribution Feeders With DGChristos ApostolopoulosBelum ada peringkat
- A Method of Measuring Three Phase Transmission Line Parameters For Relay SettingsDokumen4 halamanA Method of Measuring Three Phase Transmission Line Parameters For Relay SettingsChristos ApostolopoulosBelum ada peringkat
- TR0604 PDFDokumen86 halamanTR0604 PDFChristos ApostolopoulosBelum ada peringkat
- 00400900Dokumen10 halaman00400900Christos ApostolopoulosBelum ada peringkat
- in 30 MinutesDokumen5 halamanin 30 MinutesCésar DiazBelum ada peringkat
- 02 BRABB - 02 - Data Model V1 PDFDokumen22 halaman02 BRABB - 02 - Data Model V1 PDFChristos ApostolopoulosBelum ada peringkat
- UnixDokumen251 halamanUnixAnkush AgarwalBelum ada peringkat
- Teks Drama Malin KundangDokumen8 halamanTeks Drama Malin KundangUhuy ManiaBelum ada peringkat
- Monitor Stryker 26 PLGDokumen28 halamanMonitor Stryker 26 PLGBrandon MendozaBelum ada peringkat
- Asus Test ReportDokumen4 halamanAsus Test ReportFerry RiantoBelum ada peringkat
- Contoh Assignment PDFDokumen18 halamanContoh Assignment PDFSiti Fatimah A Salam67% (3)
- IIM L: 111iiiiiiiDokumen54 halamanIIM L: 111iiiiiiiJavier GonzalezBelum ada peringkat
- Dehn Brian Intonation SolutionsDokumen76 halamanDehn Brian Intonation SolutionsEthan NealBelum ada peringkat
- Minuets of The Second SCTVE MeetingDokumen11 halamanMinuets of The Second SCTVE MeetingLokuliyanaNBelum ada peringkat
- Karthik ResumeDokumen2 halamanKarthik ResumeArun Raj ABelum ada peringkat
- HemoptysisDokumen30 halamanHemoptysisMarshall ThompsonBelum ada peringkat
- Journal of Atmospheric Science Research - Vol.5, Iss.4 October 2022Dokumen54 halamanJournal of Atmospheric Science Research - Vol.5, Iss.4 October 2022Bilingual PublishingBelum ada peringkat
- Discrete Mathematics and Its Applications: Basic Structures: Sets, Functions, Sequences, and SumsDokumen61 halamanDiscrete Mathematics and Its Applications: Basic Structures: Sets, Functions, Sequences, and SumsBijori khanBelum ada peringkat
- Will Smith BiographyDokumen11 halamanWill Smith Biographyjhonatan100% (1)
- Land of PakistanDokumen23 halamanLand of PakistanAbdul Samad ShaikhBelum ada peringkat
- Kefauver Harris AmendmentsDokumen7 halamanKefauver Harris AmendmentsAnil kumarBelum ada peringkat
- NGCP EstimatesDokumen19 halamanNGCP EstimatesAggasid ArnelBelum ada peringkat
- AFAR - 07 - New Version No AnswerDokumen7 halamanAFAR - 07 - New Version No AnswerjonasBelum ada peringkat
- Bajaj CNSDokumen3 halamanBajaj CNSAbhijit PaikarayBelum ada peringkat
- Product Specifications Product Specifications: LLPX411F LLPX411F - 00 - V1 V1Dokumen4 halamanProduct Specifications Product Specifications: LLPX411F LLPX411F - 00 - V1 V1David MooneyBelum ada peringkat
- The International Poker RulesDokumen2 halamanThe International Poker RulesOutontheBubbleBelum ada peringkat
- #Angles Are in Degrees: EGR2313 HW SOLUTIONS (2021)Dokumen4 halaman#Angles Are in Degrees: EGR2313 HW SOLUTIONS (2021)SolomonBelum ada peringkat
- Laboratorio 1Dokumen6 halamanLaboratorio 1Marlon DiazBelum ada peringkat
- Toi Su20 Sat Epep ProposalDokumen7 halamanToi Su20 Sat Epep ProposalTalha SiddiquiBelum ada peringkat
- Feds Subpoena W-B Area Info: He Imes EaderDokumen42 halamanFeds Subpoena W-B Area Info: He Imes EaderThe Times LeaderBelum ada peringkat
- Getting Returning Vets Back On Their Feet: Ggoopp EennddggaammeeDokumen28 halamanGetting Returning Vets Back On Their Feet: Ggoopp EennddggaammeeSan Mateo Daily JournalBelum ada peringkat