Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Montgomery vs. Daly - The Banking SwindleDokumen11 halamanMontgomery vs. Daly - The Banking SwindlequarantinedBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Electricity at Work - Safe Working Practices HSG85Dokumen27 halamanElectricity at Work - Safe Working Practices HSG85Sivakumar NatarajanBelum ada peringkat
- Books Confirmation - Sem VII - 2020-2021 PDFDokumen17 halamanBooks Confirmation - Sem VII - 2020-2021 PDFRaj Kothari MBelum ada peringkat
- 2023-04-28 NMSU Executive SummaryDokumen2 halaman2023-04-28 NMSU Executive SummaryDamienWillisBelum ada peringkat
- Numerical Simulation of Turbulent Flow Over Surface Mounted Obstacles With Sharp Edges and CornersDokumen19 halamanNumerical Simulation of Turbulent Flow Over Surface Mounted Obstacles With Sharp Edges and CornersHelen ChoiBelum ada peringkat
- Sajjad Ali: API Mechanical Tank Inspector, QCI Welding (Aramco Approved)Dokumen5 halamanSajjad Ali: API Mechanical Tank Inspector, QCI Welding (Aramco Approved)Owais MalikBelum ada peringkat
- Finaldis2011 1Dokumen4 halamanFinaldis2011 1syaiful.idzwanBelum ada peringkat
- Dove Case Study QNA: Presented - Rachna JoshiDokumen7 halamanDove Case Study QNA: Presented - Rachna JoshiGo2 MummaBelum ada peringkat
- Improving The Passenger Experience: Monitoring Airport Quality of ServiceDokumen6 halamanImproving The Passenger Experience: Monitoring Airport Quality of ServiceParisa HadidianBelum ada peringkat
- Merenstein Gardners Handbook of Neonatal Intensive Care 8Th Edition Sandra Lee Gardner Brian S Carter Mary I Enzman Hines Jacinto A Hernandez Download PDF ChapterDokumen52 halamanMerenstein Gardners Handbook of Neonatal Intensive Care 8Th Edition Sandra Lee Gardner Brian S Carter Mary I Enzman Hines Jacinto A Hernandez Download PDF Chapterrichard.martin380100% (16)
- Towards Improvement of The Rights and Duties of Mutawalli and Nazir in The Management And..Dokumen17 halamanTowards Improvement of The Rights and Duties of Mutawalli and Nazir in The Management And..Mutqinah SshiBelum ada peringkat
- Nigeria Country Profile - 0Dokumen4 halamanNigeria Country Profile - 0Nden SohbutBelum ada peringkat
- QuickTransit SSLI Release Notes 1.1Dokumen12 halamanQuickTransit SSLI Release Notes 1.1subhrajitm47Belum ada peringkat
- Ba 133 Gbs For Week 02Dokumen13 halamanBa 133 Gbs For Week 02Arnete Carla VitugBelum ada peringkat
- Sop ECUDokumen5 halamanSop ECUSumaira CheemaBelum ada peringkat
- N G Ày 2 0 T H Á NG B A N Ă M 2 0 2 0: Brand ManagementDokumen10 halamanN G Ày 2 0 T H Á NG B A N Ă M 2 0 2 0: Brand ManagementThịnh NguyễnBelum ada peringkat
- Types of Annuity & Intra Year Compounding: Dr. Anubha GuptaDokumen15 halamanTypes of Annuity & Intra Year Compounding: Dr. Anubha GuptarashmipoojaBelum ada peringkat
- Union of India v. Mohit Minerals Pvt. LTD.-GST Validity AnalysisDokumen4 halamanUnion of India v. Mohit Minerals Pvt. LTD.-GST Validity Analysissandhya parimalaBelum ada peringkat
- Pmwasabi EB3Dokumen4 halamanPmwasabi EB3AlleleBiotechBelum ada peringkat
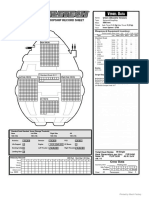
- Union Class Dropship 3025Dokumen1 halamanUnion Class Dropship 3025A KBelum ada peringkat
- Azhar Marketing Final PPRDokumen9 halamanAzhar Marketing Final PPRafnain rafiBelum ada peringkat
- Smart Phone Usage Among College Going StudentsDokumen9 halamanSmart Phone Usage Among College Going StudentsAkxzBelum ada peringkat
- Group 5 Transforming Banana Stem Waste To Eco Tote Bag.Dokumen4 halamanGroup 5 Transforming Banana Stem Waste To Eco Tote Bag.Gabriel Abram JopiaBelum ada peringkat
- Space Vector Modulation - An Introduction - TutoriDokumen11 halamanSpace Vector Modulation - An Introduction - TutorileonardoBelum ada peringkat
- Industrial Training HandbookDokumen26 halamanIndustrial Training HandbookChung tong Betty wongBelum ada peringkat
- ERP Final PPT 22-4Dokumen10 halamanERP Final PPT 22-4ramesh pokhriyaalBelum ada peringkat
- The Effect of Cross-Cultural Management On The Performance of Multinational Companies in NigeriaDokumen13 halamanThe Effect of Cross-Cultural Management On The Performance of Multinational Companies in NigeriaPreethu GowdaBelum ada peringkat
- C10G - Hardware Installation GD - 3 - 12 - 2014Dokumen126 halamanC10G - Hardware Installation GD - 3 - 12 - 2014Htt Ếch CốmBelum ada peringkat
- Sharp AR-C172M ServiceM EN PDFDokumen308 halamanSharp AR-C172M ServiceM EN PDFpiaggio_nrgBelum ada peringkat
- FDI and FIIDokumen17 halamanFDI and FIIsharathBelum ada peringkat