Anda mungkin juga menyukai
- Établir Mes Documents ISO 9001 Version V2015 PDFDokumen236 halamanÉtablir Mes Documents ISO 9001 Version V2015 PDFchaouch.najeh100% (5)
- DS Grafcet Logique Combinatoire CORRECTIONDokumen7 halamanDS Grafcet Logique Combinatoire CORRECTIONchaouch.najeh100% (2)
- Annexe 3 Modele Fiche Qualite - 15.006Dokumen1 halamanAnnexe 3 Modele Fiche Qualite - 15.006chaouch.najeh100% (2)
- Les Equipement Du Reseau de Distribution CHapitre 02Dokumen7 halamanLes Equipement Du Reseau de Distribution CHapitre 02houda50% (2)
- Les Engrenages (Cours Bac)Dokumen2 halamanLes Engrenages (Cours Bac)MIMFS86% (43)
- Le Guide Du Responsable Hse-632-Extract PDFDokumen34 halamanLe Guide Du Responsable Hse-632-Extract PDFAnonymous 1FzIK5hBelum ada peringkat
- TP FpgaDokumen22 halamanTP FpgakfawazBelum ada peringkat
- GBPH Restauration Collect 1999Dokumen173 halamanGBPH Restauration Collect 1999brilma44100% (1)
- Devoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezDokumen5 halamanDevoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezAmira JebaliBelum ada peringkat
- TP Distributeur Hydraulique EleveDokumen5 halamanTP Distributeur Hydraulique EleveHatem Laajili100% (1)
- (TDM) (CO) Theorie Des MecanismesDokumen13 halaman(TDM) (CO) Theorie Des MecanismesKhaled SouaissaBelum ada peringkat
- PDFDokumen18 halamanPDFchaouch.najehBelum ada peringkat
- Exercice Limiteur de Couple Transmissible ÉèveDokumen2 halamanExercice Limiteur de Couple Transmissible Éèvemohamed1101Belum ada peringkat
- Devoire de Synthése N°1 - Technique - 1ére Année Secondaire (2019 - 2020) Lycée El Khadra36 - MR Soudani SamiDokumen5 halamanDevoire de Synthése N°1 - Technique - 1ére Année Secondaire (2019 - 2020) Lycée El Khadra36 - MR Soudani SamiZaineb LaouiniBelum ada peringkat
- Presentation Des Annuaires LDAPDokumen7 halamanPresentation Des Annuaires LDAPPrince Godasse OkitemboBelum ada peringkat
- Beton Armee v3Dokumen120 halamanBeton Armee v3AllaBoumendjelBelum ada peringkat
- Modulations Numeriques PDFDokumen53 halamanModulations Numeriques PDFHamza Bennani67% (6)
- CIH MOBILE La Nouvelle Application CIH BANKDokumen43 halamanCIH MOBILE La Nouvelle Application CIH BANKCIHBANKBelum ada peringkat
- Iatf 16949Dokumen67 halamanIatf 16949Slaheddine Khlifi100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDokumen6 halamanDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliBelum ada peringkat
- EngrenageDokumen33 halamanEngrenagechaouch.najehBelum ada peringkat
- 1A Devoir de Synthèse N°2 - TM 2014Dokumen6 halaman1A Devoir de Synthèse N°2 - TM 2014Kamel TayahiBelum ada peringkat
- Ex 3 2steDokumen4 halamanEx 3 2steHicham MarzouqBelum ada peringkat
- Exercice Chaine Energie Eleve PDFDokumen13 halamanExercice Chaine Energie Eleve PDFIbra Moulay100% (2)
- 2-Devoir de Controle N1-2AS-2021Dokumen7 halaman2-Devoir de Controle N1-2AS-2021amri mohamedBelum ada peringkat
- Examens National 2bac Sci Genieur SMB 2017 R PDFDokumen32 halamanExamens National 2bac Sci Genieur SMB 2017 R PDFHanane TounsiBelum ada peringkat
- Dossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsDokumen3 halamanDossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsMortadha RabahBelum ada peringkat
- 17 TransformationDokumen10 halaman17 TransformationMohamed NaciriBelum ada peringkat
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Dokumen5 halamanDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimBelum ada peringkat
- Cours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorDokumen10 halamanCours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorHana KhemissiBelum ada peringkat
- Les Embrayages1Dokumen14 halamanLes Embrayages1Ghayth BouzayaniBelum ada peringkat
- Dev 1 SDokumen4 halamanDev 1 SKhaled MaamriBelum ada peringkat
- Ds2-2ème-Pot de Fleurs 2020-2021Dokumen10 halamanDs2-2ème-Pot de Fleurs 2020-2021Adam BensaidBelum ada peringkat
- 3-Devoir de Controle N1-2AS-2021Dokumen5 halaman3-Devoir de Controle N1-2AS-2021Rasmi BaananouBelum ada peringkat
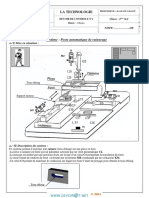
- Système: Poste de Marquage de Savon: DescriptionDokumen5 halamanSystème: Poste de Marquage de Savon: DescriptionHatem BouhamedBelum ada peringkat
- dcn1 2020 3t2 Pince CorrectionDokumen4 halamandcn1 2020 3t2 Pince CorrectionGuiliassBelum ada peringkat
- Devoir de Contrôle N1 Technologie 2ème Sciences 2012 2013 MR Abdallah RAOUAFIDokumen3 halamanDevoir de Contrôle N1 Technologie 2ème Sciences 2012 2013 MR Abdallah RAOUAFIArwa BerrichBelum ada peringkat
- DS1 3 11 12DPMécaDokumen4 halamanDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- Sujet 1Dokumen10 halamanSujet 1وسيم زعفوريBelum ada peringkat
- DC1 2as Nov 2022Dokumen4 halamanDC1 2as Nov 2022Hae LinBelum ada peringkat
- Devoir 1 Modele 4 Si 2 Bac SM B Semestre 2Dokumen11 halamanDevoir 1 Modele 4 Si 2 Bac SM B Semestre 2lemsouguer0% (1)
- TD-3 Train ÉpicycloïdalDokumen1 halamanTD-3 Train Épicycloïdalchouchene100% (2)
- DC N°1 - 1ère - Machine de Percage Et Lamage 2020-2021Dokumen4 halamanDC N°1 - 1ère - Machine de Percage Et Lamage 2020-2021Adam BensaidBelum ada peringkat
- Devoir de Synthèse N°1 2015 2016 (MR Baazaoui Abderraouf)Dokumen5 halamanDevoir de Synthèse N°1 2015 2016 (MR Baazaoui Abderraouf)Ahlem Rmida Ben HmidaBelum ada peringkat
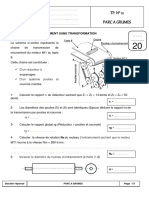
- Parc A GrumesDokumen3 halamanParc A Grumeslou louBelum ada peringkat
- Unité de Fabrication de Fûts - DPMDokumen4 halamanUnité de Fabrication de Fûts - DPMramziBelum ada peringkat
- Sujet 3 PDFDokumen5 halamanSujet 3 PDFMohamed Snoussi0% (1)
- Devoir de Controle N°4: Distributeur de Carburant GPLDokumen4 halamanDevoir de Controle N°4: Distributeur de Carburant GPLjetlaoui frajBelum ada peringkat
- Devoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI RaoufDokumen4 halamanDevoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI Raoufchaouachi alarbiBelum ada peringkat
- 02 - Système Automatique de Marquage de Boîtiers (DR)Dokumen4 halaman02 - Système Automatique de Marquage de Boîtiers (DR)FM HELSENKI0% (2)
- Devoir de Contrôle N°1 - Technologie Poste Automatique de Rainurage - 2ème Sciences (2014-2015) MR BAAZAOUI RaoufDokumen4 halamanDevoir de Contrôle N°1 - Technologie Poste Automatique de Rainurage - 2ème Sciences (2014-2015) MR BAAZAOUI RaoufMoutez EzzarBelum ada peringkat
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDokumen5 halamanDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences (2007-2008) Mme Toumi Imen Système Poste de Pliage Et de Poinçonnage de TôllesDokumen5 halamanDevoir de Synthèse N°1 - Technologie - 2ème Sciences (2007-2008) Mme Toumi Imen Système Poste de Pliage Et de Poinçonnage de TôllesMed Aymen Bensalem100% (1)
- LectureDokumen4 halamanLectureRahma BaccarBelum ada peringkat
- Système Vis ÉcrouDokumen2 halamanSystème Vis ÉcrouTarek Ben Moncef AdouaniBelum ada peringkat
- Révision Engrenage 2020Dokumen15 halamanRévision Engrenage 2020Yosr Ben SaidBelum ada peringkat
- Devoir de Synthèse N°1 - Technologie - Antenne Telescopique - Poste Automatique de Remplissage Et de Fermeture de Paquets - 2ème Sciences (2016-2017) MR Zouhaier RihaneDokumen6 halamanDevoir de Synthèse N°1 - Technologie - Antenne Telescopique - Poste Automatique de Remplissage Et de Fermeture de Paquets - 2ème Sciences (2016-2017) MR Zouhaier RihaneAbdelkader Zidane0% (1)
- Technique PDFDokumen23 halamanTechnique PDFAnonymous brJQnGr1kBelum ada peringkat
- DPDokumen5 halamanDPLASSOUEDBelum ada peringkat
- Devoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelDokumen4 halamanDevoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelAnta diama sambe100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique - Fraiseuse Automatique - 3ème Technique (2018-2019) MR Dhifaoui AbdelwahebDokumen8 halamanDevoir de Contrôle N°1 - Génie Mécanique - Fraiseuse Automatique - 3ème Technique (2018-2019) MR Dhifaoui AbdelwahebKereme JulienBelum ada peringkat
- Examen PratiqueDokumen7 halamanExamen PratiqueRimas Inconue100% (2)
- DPM21 22Dokumen4 halamanDPM21 22jetlaoui frajBelum ada peringkat
- Devoir 3 Si 2 Bac STM Tri de CaisseDokumen11 halamanDevoir 3 Si 2 Bac STM Tri de CaisseHajar Ben GaraâBelum ada peringkat
- TD Chariot ÉlectriqueDokumen1 halamanTD Chariot Électriqueseddikmorabet100% (1)
- Contole Usinage ComplexeDokumen2 halamanContole Usinage ComplexeMOHAM BELHOUDABelum ada peringkat
- 3-Devoir+de+synthese +N1-2AS-2021Dokumen4 halaman3-Devoir+de+synthese +N1-2AS-2021amri mohamedBelum ada peringkat
- Devoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariDokumen5 halamanDevoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariAbidi NawresBelum ada peringkat
- S U J e T: Poste Automatique D'agrafage Et D'étiquetage Des Caisses en CartonDokumen7 halamanS U J e T: Poste Automatique D'agrafage Et D'étiquetage Des Caisses en Cartonbejaoui100% (1)
- Tp7 Freinage Machine Asynchrone Injection Courant ContinuDokumen5 halamanTp7 Freinage Machine Asynchrone Injection Courant Continudavsou100% (1)
- DS1-2023-Poste Automatique de perçage-2ASDokumen2 halamanDS1-2023-Poste Automatique de perçage-2ASNabil Ouled Ahmed100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDokumen8 halamanDevoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDhia Cherni100% (1)
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010) 2 PDFDokumen3 halamanDevoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010) 2 PDFأبوأحمد الجزيريBelum ada peringkat
- Devoir N°3 Manipulateur de Tubes en Béton2022Dokumen18 halamanDevoir N°3 Manipulateur de Tubes en Béton2022Lahoucine AgmaratBelum ada peringkat
- app6-STE-STM-SMB - Destribution de TubesDokumen21 halamanapp6-STE-STM-SMB - Destribution de TubesMajed NesrineBelum ada peringkat
- PCA Entreprises - CGEMDokumen23 halamanPCA Entreprises - CGEMAli AmarBelum ada peringkat
- Cours Strategie Qualite PDFDokumen144 halamanCours Strategie Qualite PDFchaouch.najehBelum ada peringkat
- Guide Pratique D'échantillonnage Pour Les Évaluations D'impactDokumen28 halamanGuide Pratique D'échantillonnage Pour Les Évaluations D'impactchaouch.najehBelum ada peringkat
- 2609 Archiveur Multimedia Mecanique PDFDokumen24 halaman2609 Archiveur Multimedia Mecanique PDFdxsszszBelum ada peringkat
- AllaitementDokumen1 halamanAllaitementchaouch.najehBelum ada peringkat
- Guide Pratique D'échantillonnage Pour Les Évaluations D'impactDokumen28 halamanGuide Pratique D'échantillonnage Pour Les Évaluations D'impactchaouch.najehBelum ada peringkat
- Archiveur Multimedia MecaniqueDokumen3 halamanArchiveur Multimedia Mecaniquechaouch.najehBelum ada peringkat
- 8faoq-Palans Electriques A Cable Avec CorrectionDokumen2 halaman8faoq-Palans Electriques A Cable Avec Correctionchaouch.najeh100% (1)
- LM Fr-EnDokumen1 halamanLM Fr-Enchaouch.najehBelum ada peringkat
- Theorie Des MecanismesDokumen10 halamanTheorie Des Mecanismeschaouch.najehBelum ada peringkat
- 48 - EXD48 - ANX 11 - Service de Circulation FRDokumen89 halaman48 - EXD48 - ANX 11 - Service de Circulation FRchaouch.najehBelum ada peringkat
- Les Engrenages Cours BacDokumen6 halamanLes Engrenages Cours Bacchaouch.najehBelum ada peringkat
- Formulaire Demande Permis Hors Canada FRDokumen2 halamanFormulaire Demande Permis Hors Canada FRchaouch.najeh100% (1)
- FCT AdaptationDokumen7 halamanFCT Adaptationchaouch.najehBelum ada peringkat
- Formulaire Demande Permis Hors Canada FRDokumen2 halamanFormulaire Demande Permis Hors Canada FRchaouch.najeh100% (1)
- 48 - EXD48 - ANX 11 - Service de Circulation FRDokumen89 halaman48 - EXD48 - ANX 11 - Service de Circulation FRchaouch.najehBelum ada peringkat
- Formulaire Demande Permis Hors Canada FRDokumen2 halamanFormulaire Demande Permis Hors Canada FRchaouch.najeh100% (1)
- Série D'exercices 18 - Sciences Physiques Etude Quantitative D'une Réaction Chimique, Forces Et Équilibres Et PressionDokumen40 halamanSérie D'exercices 18 - Sciences Physiques Etude Quantitative D'une Réaction Chimique, Forces Et Équilibres Et Pressionchaouch.najehBelum ada peringkat
- Formulaire Demande Permis Hors Canada FRDokumen2 halamanFormulaire Demande Permis Hors Canada FRchaouch.najeh100% (1)
- Droit de L - HommeDokumen41 halamanDroit de L - Hommechaouch.najehBelum ada peringkat
- V.G.C. Installation Pour Confire: Page 1 de 3Dokumen3 halamanV.G.C. Installation Pour Confire: Page 1 de 3Zighoud Djamel eddineBelum ada peringkat
- Avantage ConcurrentielDokumen3 halamanAvantage Concurrentielmiya00% (1)
- Fiche Prof OsmoseDokumen3 halamanFiche Prof OsmoseAudrey LyliBelum ada peringkat
- TD Algorithme Avec CorrectionsDokumen32 halamanTD Algorithme Avec Correctionsmicipsa0% (1)
- Iso 9001 - 2015 - 2014Dokumen33 halamanIso 9001 - 2015 - 2014Chancys MbembaBelum ada peringkat
- BOLA10 Dver 1Dokumen5 halamanBOLA10 Dver 1Aninhas GachaBelum ada peringkat
- TP4 WordDokumen3 halamanTP4 WorddbikabdellahBelum ada peringkat
- Fabrication Cle4ff16fDokumen58 halamanFabrication Cle4ff16fnatsu13100% (2)
- 192 Modele CV OrgDokumen2 halaman192 Modele CV OrgAiram AiramBelum ada peringkat
- Dyka AssDokumen4 halamanDyka AssYYOUNOS_MABelum ada peringkat
- 7 Can Cna PDFDokumen61 halaman7 Can Cna PDFBader KassameBelum ada peringkat
- Eternels Tome 5 PDFDokumen2 halamanEternels Tome 5 PDFPatrickBelum ada peringkat
- PreDokumen28 halamanPreJohn BarrowBelum ada peringkat
- Lot 3 - Bagata - Puits de Pompage Et Équipement de TêteDokumen7 halamanLot 3 - Bagata - Puits de Pompage Et Équipement de TêteHamedBelum ada peringkat
- Machine À Courant ContinuDokumen6 halamanMachine À Courant Continuرضا بن عمارBelum ada peringkat
- Ecoulement Des Gaz Dans Un OrificeDokumen5 halamanEcoulement Des Gaz Dans Un OrificeDuboisBelum ada peringkat
- Le Secteur Minier en Afrique Subsaharienne Problematiques Enjeux Et PerspectivesDokumen3 halamanLe Secteur Minier en Afrique Subsaharienne Problematiques Enjeux Et PerspectivesMouloud IssaadBelum ada peringkat
- Gescom Personnaliser Menus CataloguesDokumen9 halamanGescom Personnaliser Menus CataloguesNacer IdjedareneBelum ada peringkat
- Cours SMé 2eme PartieDokumen17 halamanCours SMé 2eme PartieAbdelali KanfoudBelum ada peringkat
- Les Opérations Imposables Par Nature À La TVA PDFDokumen3 halamanLes Opérations Imposables Par Nature À La TVA PDFSoukaina MoumenBelum ada peringkat
- Lexique Digital MarketingDokumen23 halamanLexique Digital Marketinghubert kratiroffBelum ada peringkat
- Actionneur Pneumatique Seance1 - 2023.ppt (Compatibility Mode)Dokumen27 halamanActionneur Pneumatique Seance1 - 2023.ppt (Compatibility Mode)Meryem TamirBelum ada peringkat
- Chapitre - 2 - Etude Des Entrainements À Base de Machines À Courant AlternatifDokumen52 halamanChapitre - 2 - Etude Des Entrainements À Base de Machines À Courant AlternatifTherence Danel TCHIMAMBOUBelum ada peringkat
- Examen1 Energies renouvelablesDokumen1 halamanExamen1 Energies renouvelablesAbdekhalek CHELLAKHIBelum ada peringkat