Anda mungkin juga menyukai
- MT S4000 EngDokumen8 halamanMT S4000 Engsamet gozubolBelum ada peringkat
- Your Source For Ac & DC Motor ControlDokumen128 halamanYour Source For Ac & DC Motor ControlJordan Moreira ValdezBelum ada peringkat
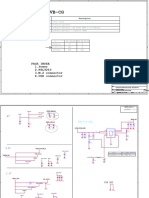
- RTL9210-VB-CG Demo V203 PDFDokumen5 halamanRTL9210-VB-CG Demo V203 PDFCenusa MihaiBelum ada peringkat
- Wellpro Module Modbus Rtu SetupDokumen1 halamanWellpro Module Modbus Rtu SetupOscar SantellanoBelum ada peringkat
- Slide 1: No-Churn TelecomDokumen11 halamanSlide 1: No-Churn Telecomleongladxton100% (1)
- Toshiba - Bs - AC Motor - Eng PDFDokumen36 halamanToshiba - Bs - AC Motor - Eng PDFAleksa Milenkovic100% (1)
- Multi DNC OverviewDokumen9 halamanMulti DNC OverviewOmar Lopez Dela RivaBelum ada peringkat
- What Is CNC Machine Reference PointDokumen2 halamanWhat Is CNC Machine Reference PointRevolusiSoekarnoBelum ada peringkat
- Servo Motors OverviewDokumen5 halamanServo Motors OverviewMohammed Kandeel100% (1)
- Special Electrical MachineDokumen15 halamanSpecial Electrical MachineJesse Jones SeraspeBelum ada peringkat
- Axis Drive Systems PDFDokumen62 halamanAxis Drive Systems PDFJoshBelum ada peringkat
- Digital Arc Voltage Height Controller Operation Manual (V1.9)Dokumen64 halamanDigital Arc Voltage Height Controller Operation Manual (V1.9)PandegaBelum ada peringkat
- Introduction To Abrasive Surface FinishingDokumen37 halamanIntroduction To Abrasive Surface FinishingAnkett LahaseBelum ada peringkat
- Stepper Motor CatalogueDokumen28 halamanStepper Motor CatalogueSuvek KumarBelum ada peringkat
- Servo Maquina YudakDokumen16 halamanServo Maquina Yudakdaniel100% (1)
- EEE CH 5 Three Phase 16052018 010215PMDokumen10 halamanEEE CH 5 Three Phase 16052018 010215PMVjayBelum ada peringkat
- Troubleshooting Manual For I/O Link Communication Alarm: (System Alarm PC050/PC150/971)Dokumen22 halamanTroubleshooting Manual For I/O Link Communication Alarm: (System Alarm PC050/PC150/971)huutan12345Belum ada peringkat
- Electromagnetic Force Couplingin - ANSYS PDFDokumen48 halamanElectromagnetic Force Couplingin - ANSYS PDFrahulbqaBelum ada peringkat
- Servo Motor - Servo Mechanism - Theory and Working PrincipleDokumen6 halamanServo Motor - Servo Mechanism - Theory and Working PrincipleBrahmanand SinghBelum ada peringkat
- Weller CatalogueDokumen48 halamanWeller CatalogueRadio PartsBelum ada peringkat
- Heidenhain Angle EncodersDokumen64 halamanHeidenhain Angle EncodersassisrfBelum ada peringkat
- 22323232322332mitsubishi LvsDokumen140 halaman22323232322332mitsubishi LvsSunil SinghBelum ada peringkat
- Stepping Motors Brushless Pag 21Dokumen49 halamanStepping Motors Brushless Pag 21Luis R. Cabrales JimenezBelum ada peringkat
- Ac Voltage Controller Using Thyristor Project Report by SandeepDokumen29 halamanAc Voltage Controller Using Thyristor Project Report by SandeepSANDEEP DHANDA100% (1)
- Industrial Robotics: Course OutcomesDokumen74 halamanIndustrial Robotics: Course OutcomesMeenakshi PriyaBelum ada peringkat
- Nachi Robot Catalog 2012Dokumen20 halamanNachi Robot Catalog 2012Xanti Zabala Da RosaBelum ada peringkat
- BLDC Sepic Motor Torque ControlDokumen60 halamanBLDC Sepic Motor Torque ControlSuresh SsbnBelum ada peringkat
- Ball Screw Selection ExerciseDokumen7 halamanBall Screw Selection ExercisemaddyaugBelum ada peringkat
- Maintenance & Troubleshooting: Problem IsolationDokumen16 halamanMaintenance & Troubleshooting: Problem IsolationÁgost VitaBelum ada peringkat
- Switched Reluctance MotorDokumen75 halamanSwitched Reluctance Motor15BEE1120 ISHAV SHARDABelum ada peringkat
- Heidenhain EncoderDokumen2 halamanHeidenhain EncoderCristian AlonsoBelum ada peringkat
- Switched Reluctance Motor (SRM)Dokumen8 halamanSwitched Reluctance Motor (SRM)Ömer Faruk AbdullahBelum ada peringkat
- Stepper Motor ControllerDokumen3 halamanStepper Motor Controllerelfrich100% (3)
- Data Sheet For SIMOTICS S-1FK7Dokumen2 halamanData Sheet For SIMOTICS S-1FK7Naly Cas100% (1)
- SLUP079Dokumen46 halamanSLUP079bookreader1968Belum ada peringkat
- Variable Speed Drive - IntroductionDokumen6 halamanVariable Speed Drive - Introductionawhk2006Belum ada peringkat
- Readme PDFDokumen18 halamanReadme PDFMohammad GolastanehBelum ada peringkat
- Power Converters Simulation Lab Manual - (2015-2016)Dokumen41 halamanPower Converters Simulation Lab Manual - (2015-2016)Leela KrishnaBelum ada peringkat
- Chapter 2 TransformersDokumen3 halamanChapter 2 TransformersSuktara-Drubatara TaritBelum ada peringkat
- Fer 44 01 000 1998 PDFDokumen36 halamanFer 44 01 000 1998 PDFDoDuyBacBelum ada peringkat
- Sensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverDokumen7 halamanSensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverWalid AbidBelum ada peringkat
- 3 - EE8002 DEA Unit 5Dokumen21 halaman3 - EE8002 DEA Unit 5Ramesh BabuBelum ada peringkat
- A Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationsDokumen3 halamanA Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationslionpjrBelum ada peringkat
- 23 04 10 Electronic Variable Speed DrivesDokumen7 halaman23 04 10 Electronic Variable Speed Drivesyxp2237Belum ada peringkat
- Synchronous Machines and SCDokumen6 halamanSynchronous Machines and SCivancho04mBelum ada peringkat
- MIKI Electromagnetic Clutches and BrakesDokumen38 halamanMIKI Electromagnetic Clutches and Brakesaiyubi2100% (1)
- Chapter 7 Induction Machines-EEE301Dokumen96 halamanChapter 7 Induction Machines-EEE301DilekBelum ada peringkat
- Simodrive Power Drive en PDFDokumen22 halamanSimodrive Power Drive en PDFAlexandre GodoiBelum ada peringkat
- Fiber Direction and Stacking Sequence Design For Bicycle Frame Made of Carbon Epoxy Composite LaminateDokumen10 halamanFiber Direction and Stacking Sequence Design For Bicycle Frame Made of Carbon Epoxy Composite LaminateRubenBelum ada peringkat
- Electromagnetic Brakes ClutchesDokumen8 halamanElectromagnetic Brakes Clutchesfsilassie8012100% (1)
- My ProjectDokumen21 halamanMy ProjectSam SachanBelum ada peringkat
- Planetary Gear For Mounting To AC MotorDokumen48 halamanPlanetary Gear For Mounting To AC MotorPrabish KumarBelum ada peringkat
- Design Guideline For Hairpin WindingDokumen7 halamanDesign Guideline For Hairpin WindingXiaoShan LIUBelum ada peringkat
- CNC IotDokumen8 halamanCNC Iotmamuaug23100% (1)
- LIMDokumen18 halamanLIMSairam SirasapalliBelum ada peringkat
- User Manual (SZGH-X Series) V1.5-UDokumen58 halamanUser Manual (SZGH-X Series) V1.5-UDmytroKrBelum ada peringkat
- MR-J3-B-RJ004U LM-H2 LM-U2 LM-F: SeriesDokumen212 halamanMR-J3-B-RJ004U LM-H2 LM-U2 LM-F: SeriesJorge MorenoBelum ada peringkat
- Transistorized Series Voltage RegulatorDokumen4 halamanTransistorized Series Voltage RegulatorIpsita MishraBelum ada peringkat
- Rechner s10 268 553 01 Heidenhain ManualDokumen752 halamanRechner s10 268 553 01 Heidenhain ManualDaniel SchuchBelum ada peringkat
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDari EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionBelum ada peringkat
- ECON4150 - Introductory Econometrics Lecture 2: Review of StatisticsDokumen41 halamanECON4150 - Introductory Econometrics Lecture 2: Review of StatisticsSaul DuranBelum ada peringkat
- Fixed Frequency, 99% Duty Cycle Peak Current Mode Notebook System Power ControllerDokumen44 halamanFixed Frequency, 99% Duty Cycle Peak Current Mode Notebook System Power ControllerAualasBelum ada peringkat
- Web Application Penetration TestingDokumen11 halamanWeb Application Penetration TestingRohitBelum ada peringkat
- Afghan SnowflakeDokumen3 halamanAfghan SnowflakekiwibeasBelum ada peringkat
- Gree Dehumidifier Service ManualDokumen58 halamanGree Dehumidifier Service Manualjdv1234Belum ada peringkat
- Chemical Principles Notes Chapter 7Dokumen86 halamanChemical Principles Notes Chapter 7Robert GardnerBelum ada peringkat
- SB 234Dokumen9 halamanSB 234JolettitoBelum ada peringkat
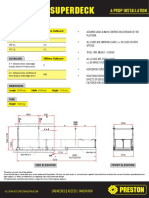
- SuperDeck All ModelsDokumen12 halamanSuperDeck All Modelsarthur chungBelum ada peringkat
- Mathematics (0580/13) October/November 2019Dokumen12 halamanMathematics (0580/13) October/November 2019kdebipershadBelum ada peringkat
- Module 2 Notes - PSOCDokumen24 halamanModule 2 Notes - PSOCpriyaBelum ada peringkat
- Hard Disk Drive Specification HGST Travelstar Z7K500Dokumen173 halamanHard Disk Drive Specification HGST Travelstar Z7K500OmegalexBelum ada peringkat
- Database Management SystemsDokumen19 halamanDatabase Management Systemsshreeya PatilBelum ada peringkat
- Joining ProcessDokumen122 halamanJoining ProcessJackson ..Belum ada peringkat
- 11Dokumen47 halaman11Felipe Retamal100% (1)
- Subjects Revised Curriculum BS ELECTRICAL ENGINEERINGDokumen18 halamanSubjects Revised Curriculum BS ELECTRICAL ENGINEERINGData StatsBelum ada peringkat
- Komposisi Jenis Dan Struktur Vegetasi Hutan GambutDokumen13 halamanKomposisi Jenis Dan Struktur Vegetasi Hutan GambutI2O42OO54 IRFAN FAUZIBelum ada peringkat
- VSF2 ND EdDokumen345 halamanVSF2 ND EdRyanBelum ada peringkat
- Buffer SolutionDokumen6 halamanBuffer SolutionAdrija MandalBelum ada peringkat
- GenMath11 Q1 Mod26 Domain and Range of Logarithmic Functions 08082020Dokumen19 halamanGenMath11 Q1 Mod26 Domain and Range of Logarithmic Functions 08082020Charity Myrh Pasquin ArzagaBelum ada peringkat
- FAR21x7 28x7 Operator's Manual P 4-8-11Dokumen312 halamanFAR21x7 28x7 Operator's Manual P 4-8-11Miguel PerezBelum ada peringkat
- Lab Guide #2 Coulombs LawDokumen3 halamanLab Guide #2 Coulombs LawJoriel CruzBelum ada peringkat
- High Performance Liquid Chromatographic Technique and Validation For Determination of Favipiravir in Bulk and Tablet FormulationDokumen7 halamanHigh Performance Liquid Chromatographic Technique and Validation For Determination of Favipiravir in Bulk and Tablet FormulationEditor IJTSRDBelum ada peringkat
- NOJA 520 05 SCADA Interface Description PDFDokumen24 halamanNOJA 520 05 SCADA Interface Description PDFsergio torrez vargasBelum ada peringkat
- Appendix 1 - Using Avaya Site Administration (ASA)Dokumen11 halamanAppendix 1 - Using Avaya Site Administration (ASA)raghavBelum ada peringkat
- Transportation ProblemDokumen3 halamanTransportation ProblemSalilBelum ada peringkat
- Panasonic MINAS A5Dokumen478 halamanPanasonic MINAS A5Vaikuntam Ramamurthy100% (1)
- Konfigurimi 02 - SkylightDokumen3 halamanKonfigurimi 02 - Skylightismet mehmetiBelum ada peringkat
- LSMW To Update Customer Master Records With Standard ObjectDokumen9 halamanLSMW To Update Customer Master Records With Standard ObjectShahid_ONBelum ada peringkat
- Data Sheet Cummins BT5,9-G6Dokumen4 halamanData Sheet Cummins BT5,9-G6acere18100% (1)