Anda mungkin juga menyukai
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsDari EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsBelum ada peringkat
- Resistencia de MaterialesDokumen11 halamanResistencia de MaterialesMikel1020Belum ada peringkat
- Design of Piles Under Cyclic Loading: SOLCYP RecommendationsDari EverandDesign of Piles Under Cyclic Loading: SOLCYP RecommendationsAlain PuechBelum ada peringkat
- Energies: Dynamic Analysis of Wind Turbine Gearbox ComponentsDokumen18 halamanEnergies: Dynamic Analysis of Wind Turbine Gearbox ComponentsGayatri ChBelum ada peringkat
- Energies: Dynamic Analysis of Wind Turbine Gearbox ComponentsDokumen18 halamanEnergies: Dynamic Analysis of Wind Turbine Gearbox Componentsmohammed khadrBelum ada peringkat
- Design of Modified Magnus Wind Rotors Using Computational Fluid Dynamics Simulation and Multi-Response OptimizationDokumen11 halamanDesign of Modified Magnus Wind Rotors Using Computational Fluid Dynamics Simulation and Multi-Response OptimizationM25 NITHISHBelum ada peringkat
- InTech-Wind Turbine Gearbox TechnologiesDokumen18 halamanInTech-Wind Turbine Gearbox TechnologieshamdimouhhiBelum ada peringkat
- Wind Turbine Gearbox Technologies: April 2010Dokumen19 halamanWind Turbine Gearbox Technologies: April 2010Adarsh ShindeBelum ada peringkat
- Structural Optimization Procedure of A Composite Wind Turbine Blade For Reducing Both Material Cost and Blade WeightDokumen20 halamanStructural Optimization Procedure of A Composite Wind Turbine Blade For Reducing Both Material Cost and Blade WeightNasser ShelilBelum ada peringkat
- Energies 13 02108Dokumen21 halamanEnergies 13 02108eqBelum ada peringkat
- 1984017959Dokumen238 halaman1984017959atorx74Belum ada peringkat
- Physical Modelling of The Behaviour of Helical Anchors: June 2016Dokumen20 halamanPhysical Modelling of The Behaviour of Helical Anchors: June 2016Oxiris QuitianBelum ada peringkat
- Evaluating Performance of Horizontal AxiDokumen14 halamanEvaluating Performance of Horizontal AxiBhawesh SthaBelum ada peringkat
- Design of Flywheel RotorsDokumen3 halamanDesign of Flywheel RotorskhayatBelum ada peringkat
- Optimizing Planetary Gears PDFDokumen7 halamanOptimizing Planetary Gears PDFyildyusuf100% (1)
- Rolling Element Bearing and Squeeze Film Damper DynamicsDokumen14 halamanRolling Element Bearing and Squeeze Film Damper DynamicsRonald GeorgeBelum ada peringkat
- Wind TurbineDokumen22 halamanWind TurbineRonaldo KasperBelum ada peringkat
- Stress Assessment of Gear Teeth in Epicyclic Gear Train For Radial Sedimentation TankDokumen7 halamanStress Assessment of Gear Teeth in Epicyclic Gear Train For Radial Sedimentation TankRonaldo KasperBelum ada peringkat
- Optimization of Planetary Gear Box For High Reduction RatioDokumen12 halamanOptimization of Planetary Gear Box For High Reduction RatioNovriansyah BrianBelum ada peringkat
- 20110008733Dokumen17 halaman20110008733philipo365Belum ada peringkat
- Suction Caisson Foundations For Offshore Wind Turbines: V Congreso Chileno de Ingeniería GeotécnicaDokumen10 halamanSuction Caisson Foundations For Offshore Wind Turbines: V Congreso Chileno de Ingeniería GeotécnicaAlex E. MoralesBelum ada peringkat
- Shock and Vibration Testing of An Amb Supported Energy Storage FlywheelDokumen6 halamanShock and Vibration Testing of An Amb Supported Energy Storage Flywheelanhntran4850Belum ada peringkat
- Power Circulation in Driveline System When The WheDokumen9 halamanPower Circulation in Driveline System When The WheAntonio GasparBelum ada peringkat
- Aerodynamic Opitmization of A Coaxial Proprotor MTR - Ahs06Dokumen23 halamanAerodynamic Opitmization of A Coaxial Proprotor MTR - Ahs06Renato GomesBelum ada peringkat
- Validation of Combined Analytical Methods To Predict Slip in Cylindrical Rollwe BearingsDokumen34 halamanValidation of Combined Analytical Methods To Predict Slip in Cylindrical Rollwe BearingskiranmittisilaBelum ada peringkat
- Report - PitchDokumen39 halamanReport - PitchShiva HareshBelum ada peringkat
- Impact of Hull Propeller Rudder Interaction On Ship Powering AssessmentDokumen15 halamanImpact of Hull Propeller Rudder Interaction On Ship Powering AssessmentPedro ParenteBelum ada peringkat
- Physical Modelling of The Behaviour of Helical AnchorsDokumen19 halamanPhysical Modelling of The Behaviour of Helical AnchorsCristina De Hollanda Cavalcanti TsuhaBelum ada peringkat
- Crank ShaftDokumen49 halamanCrank Shaftpramo_dassBelum ada peringkat
- Paper Rotor DynamicsDokumen12 halamanPaper Rotor DynamicsTony HeBelum ada peringkat
- Guo 2017Dokumen12 halamanGuo 2017NABIL HUSSAINBelum ada peringkat
- Analysis and Optimization of A Novel Energy Storage Flywheel For Improved Energy CapacityDokumen20 halamanAnalysis and Optimization of A Novel Energy Storage Flywheel For Improved Energy CapacityImane GhanouBelum ada peringkat
- Gear Units in Cpi PlantsDokumen4 halamanGear Units in Cpi PlantsafsuarezcoBelum ada peringkat
- Aeroelastic Tailoring in Wind-Turbine Blade ApplicationsDokumen13 halamanAeroelastic Tailoring in Wind-Turbine Blade ApplicationsOno YuttaBelum ada peringkat
- A2 PDFDokumen16 halamanA2 PDFMirza SakibBelum ada peringkat
- Comprehensive Study of The Aerodynamic Influence oDokumen33 halamanComprehensive Study of The Aerodynamic Influence oHardik SthaBelum ada peringkat
- Crank Shaft Full ReportDokumen77 halamanCrank Shaft Full ReportpramodassBelum ada peringkat
- 78-84 H.G. Poulos - Piled Raft Foundations For Tall BuildingsDokumen7 halaman78-84 H.G. Poulos - Piled Raft Foundations For Tall Buildingsajaymr100% (1)
- GL Offshore Wind Turbine Jacket Design PaperDokumen8 halamanGL Offshore Wind Turbine Jacket Design PaperJolly JackBelum ada peringkat
- Failure Analysis of A Re-Design KnuckleDokumen9 halamanFailure Analysis of A Re-Design Knuckleali soydaşBelum ada peringkat
- Ocean Engineering: Thanh-Tuan Tran, Eungsoo Kim, Daeyong LeeDokumen18 halamanOcean Engineering: Thanh-Tuan Tran, Eungsoo Kim, Daeyong LeeMedia umiBelum ada peringkat
- Fatigue Failure of A Composite Wind Turbine Blade at Its Root EndDokumen8 halamanFatigue Failure of A Composite Wind Turbine Blade at Its Root EndKendra KaiserBelum ada peringkat
- Finite Element Simulation of Non LinearDokumen11 halamanFinite Element Simulation of Non LinearmostafaBelum ada peringkat
- Accepted Manuscript: Composite StructuresDokumen25 halamanAccepted Manuscript: Composite StructuresAriBelum ada peringkat
- Study of The Effect of Adapter Design On The LoadDokumen5 halamanStudy of The Effect of Adapter Design On The LoadChristian GagolaBelum ada peringkat
- Stress Analysis Tractor TrailerDokumen8 halamanStress Analysis Tractor TrailerBONARCOSBelum ada peringkat
- Jurnal Analisa Kegagalan Pada Rangka TrukDokumen13 halamanJurnal Analisa Kegagalan Pada Rangka TrukBaskara Surya WidagdoBelum ada peringkat
- V150409 P230408 Bhardawaj Et AlDokumen4 halamanV150409 P230408 Bhardawaj Et Alsrihari.palliBelum ada peringkat
- Drop Test Simulations of Composite Leaf Spring Landing GearsDokumen13 halamanDrop Test Simulations of Composite Leaf Spring Landing Gearsأحمد خطابBelum ada peringkat
- An Investigation of The Distribution of Mobile Crane Loads For Construction ProjectsDokumen9 halamanAn Investigation of The Distribution of Mobile Crane Loads For Construction ProjectsrodrigoBelum ada peringkat
- Plaxis 3D-090 - Coastal - Structures - 2019Dokumen10 halamanPlaxis 3D-090 - Coastal - Structures - 2019Bilal AdeelBelum ada peringkat
- Drones 06 00091 v2Dokumen19 halamanDrones 06 00091 v2Mark7418Belum ada peringkat
- Measurement of Radial Truck Tire Dry Cornering CharacteristicsDokumen10 halamanMeasurement of Radial Truck Tire Dry Cornering CharacteristicsEfe TurkyılmazBelum ada peringkat
- Integrated Load and Strength Analysis For Offshore Wind Turbines With Jacket StructuresDokumen8 halamanIntegrated Load and Strength Analysis For Offshore Wind Turbines With Jacket StructuresChunhong ZhaoBelum ada peringkat
- Energies 17 00692 v2Dokumen14 halamanEnergies 17 00692 v2uma.bhuvanBelum ada peringkat
- A Comparison of Helicopter Main Rotor PDFDokumen18 halamanA Comparison of Helicopter Main Rotor PDFMirkoD.InterbartoloBelum ada peringkat
- Article Vilebrequin F8L413Dokumen12 halamanArticle Vilebrequin F8L413Maarten BaanBelum ada peringkat
- Effect of Bolster Suspension Parameters of Three-Piece Freight Bogie On The Lateral Frame ForceDokumen22 halamanEffect of Bolster Suspension Parameters of Three-Piece Freight Bogie On The Lateral Frame ForceBASELALBelum ada peringkat
- Design of A Planetary Gear System For A Small Scale Wind Turbine NewDokumen19 halamanDesign of A Planetary Gear System For A Small Scale Wind Turbine NewanthonyBelum ada peringkat
- A Study On The Matching Problem of Engine - 2023 - International Journal of NaDokumen15 halamanA Study On The Matching Problem of Engine - 2023 - International Journal of NaAdriana PodariuBelum ada peringkat
- Super Precision Bearing PDFDokumen204 halamanSuper Precision Bearing PDFMikel1020Belum ada peringkat
- GL1 Large Size Bearings Ingles PDFDokumen992 halamanGL1 Large Size Bearings Ingles PDFMikel10200% (1)
- Llave de Piso3 - Perforadora BE49RIIIDokumen2 halamanLlave de Piso3 - Perforadora BE49RIIIMikel1020Belum ada peringkat
- Prisionero m24x50 MMDokumen8 halamanPrisionero m24x50 MMMikel1020Belum ada peringkat
- Splines and SerrationsDokumen6 halamanSplines and SerrationsMikel1020Belum ada peringkat
- Slewing Rings: Catalogue 404Dokumen109 halamanSlewing Rings: Catalogue 404Mikel1020Belum ada peringkat
- FrontDokumen2 halamanFrontMikel1020Belum ada peringkat
- Tpi 008 de en PDFDokumen116 halamanTpi 008 de en PDFMikel1020Belum ada peringkat
- PDFDokumen88 halamanPDFMikel1020Belum ada peringkat
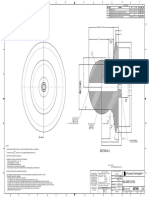
- Ball Base 12.0 20.0: Letourneau Technologies™Dokumen1 halamanBall Base 12.0 20.0: Letourneau Technologies™Mikel1020Belum ada peringkat
- B92 1bDokumen1 halamanB92 1bMikel1020Belum ada peringkat
- Sprocket PDF 4275Dokumen88 halamanSprocket PDF 4275Ivan HarijantoBelum ada peringkat
- Catalogo de Conectores para Mangueras (Parker)Dokumen483 halamanCatalogo de Conectores para Mangueras (Parker)Mikel1020Belum ada peringkat
- Section A-A: Quantities Are For Two CrawlersDokumen1 halamanSection A-A: Quantities Are For Two CrawlersMikel1020Belum ada peringkat
- Item 22Dokumen1 halamanItem 22Mikel1020Belum ada peringkat
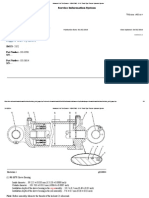
- Attributes Graphic: 233 9134 Cylinder Hydraulic/GroupDokumen1 halamanAttributes Graphic: 233 9134 Cylinder Hydraulic/GroupMikel1020Belum ada peringkat
- Cilindro Ripper LiftDokumen3 halamanCilindro Ripper LiftMikel1020Belum ada peringkat
- A003734 01 PDFDokumen1 halamanA003734 01 PDFMikel1020Belum ada peringkat
- Información de Biela PDFDokumen5 halamanInformación de Biela PDFMikel1020Belum ada peringkat
- To-Do List Infographics by SlidesgoDokumen33 halamanTo-Do List Infographics by SlidesgoMilka QuecheBelum ada peringkat
- Verb-Tenses (Past - Present - Future) 2. Conditional Sentences Type 1, 2 3. Passive Voice. 4. Reported Speech,..Dokumen4 halamanVerb-Tenses (Past - Present - Future) 2. Conditional Sentences Type 1, 2 3. Passive Voice. 4. Reported Speech,..Trung Ngạc QuangBelum ada peringkat
- Sample Module For ComdevDokumen5 halamanSample Module For ComdevKristella DraheimBelum ada peringkat
- EvE Tyrannis - Planetary Interaction (Spreadsheet Revised by 4WARD Inc.)Dokumen152 halamanEvE Tyrannis - Planetary Interaction (Spreadsheet Revised by 4WARD Inc.)Cindy BreauxBelum ada peringkat
- (The Solar System) Sherman Hollar-Astronomy - Understanding The Universe - Rosen Education Service (2011)Dokumen98 halaman(The Solar System) Sherman Hollar-Astronomy - Understanding The Universe - Rosen Education Service (2011)Camila Cavalcante100% (2)
- Atlas of Great CometsDokumen225 halamanAtlas of Great CometsSteven Penton100% (3)
- Year 9 Science Exam Revision Notes - Sets 1-5 PDFDokumen11 halamanYear 9 Science Exam Revision Notes - Sets 1-5 PDFdayahn100% (1)
- Assure Model Instructional PlanDokumen4 halamanAssure Model Instructional Planapi-242970018Belum ada peringkat
- Bible Minitheme by SlidesgoDokumen41 halamanBible Minitheme by SlidesgoFERNANDA MAURERIABelum ada peringkat
- Alice in Dreamland Kindergarten by SlidesgoDokumen48 halamanAlice in Dreamland Kindergarten by SlidesgoMia NicolasBelum ada peringkat
- Dalai LamDokumen48 halamanDalai LamCamila Gonzalez SepulvedaBelum ada peringkat
- Indepthhoroscope EngDokumen56 halamanIndepthhoroscope EngRohanBelum ada peringkat
- Fiitjee Coimbatore Centre: 10 - Physics - PCMDokumen3 halamanFiitjee Coimbatore Centre: 10 - Physics - PCMC.M.M GAMINGBelum ada peringkat
- Mantras For PlanetssDokumen2 halamanMantras For Planetssmishra012Belum ada peringkat
- B Aristotles CosmosDokumen22 halamanB Aristotles Cosmosgoldberg 61Belum ada peringkat
- 21Dokumen17 halaman21restofficalBelum ada peringkat
- Primary Science FPD Kelsey FalloDokumen17 halamanPrimary Science FPD Kelsey Falloapi-409519995Belum ada peringkat
- Logical Reasoning Verbal ReasoningDokumen55 halamanLogical Reasoning Verbal ReasoningJoel Degot Abano100% (6)
- Nine Planets (Navagraha) QuizDokumen42 halamanNine Planets (Navagraha) Quizvlaxmanan100% (1)
- Trend PredictionDokumen7 halamanTrend PredictionjivanetoBelum ada peringkat
- KP System House N Planet SignificatorDokumen16 halamanKP System House N Planet Significatorrrajeshdash100% (1)
- Balloon Ghost Craft: More Kinder CraftsDokumen21 halamanBalloon Ghost Craft: More Kinder CraftsDaniela CiontescuBelum ada peringkat
- Interplanetary Gravity-Assist Trajectory OptimizationDokumen39 halamanInterplanetary Gravity-Assist Trajectory OptimizationAnonymous REw1YIq4q7Belum ada peringkat
- JMM 04 BhavasDokumen148 halamanJMM 04 BhavasMohan Srinivasan100% (1)
- Grade 4 - Final Revision - 2020 - MR - Ahmed ElbashaDokumen33 halamanGrade 4 - Final Revision - 2020 - MR - Ahmed Elbashaashraf4m100% (1)
- 16 SecretsOfAscendants PDFDokumen5 halaman16 SecretsOfAscendants PDFPavan Kishore DevarakondaBelum ada peringkat
- Environmental Consulting by SlidesgoDokumen44 halamanEnvironmental Consulting by SlidesgoJulio Martin Aponte BayonaBelum ada peringkat
- Shalva Mardi & Rosemary Mardi The Irony and Humour of The Wise, The Wisest Made Wiser by WisdomDokumen260 halamanShalva Mardi & Rosemary Mardi The Irony and Humour of The Wise, The Wisest Made Wiser by WisdomshalvamardiBelum ada peringkat
- Monthly Update Meeting by SlidesgoDokumen45 halamanMonthly Update Meeting by SlidesgoZakiyyah Iftinaan100% (1)
- Module Lesson 3.5 Scientific Revolution and EnlightenmentDokumen11 halamanModule Lesson 3.5 Scientific Revolution and EnlightenmentJayson DapitonBelum ada peringkat
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceDari EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceBelum ada peringkat
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Dari EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Belum ada peringkat
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4.5 dari 5 bintang4.5/5 (543)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDari EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tPenilaian: 4.5 dari 5 bintang4.5/5 (27)
- A Mind at Play: How Claude Shannon Invented the Information AgeDari EverandA Mind at Play: How Claude Shannon Invented the Information AgePenilaian: 4 dari 5 bintang4/5 (53)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDari EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgePenilaian: 4.5 dari 5 bintang4.5/5 (10)
- Power System Control and ProtectionDari EverandPower System Control and ProtectionB. Don RussellPenilaian: 4 dari 5 bintang4/5 (11)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersDari Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersPenilaian: 5 dari 5 bintang5/5 (1)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Dari EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Penilaian: 4 dari 5 bintang4/5 (2)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDari EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesPenilaian: 5 dari 5 bintang5/5 (1)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialDari EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialPenilaian: 3.5 dari 5 bintang3.5/5 (3)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonDari EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonPenilaian: 5 dari 5 bintang5/5 (2)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsDari EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsPenilaian: 3.5 dari 5 bintang3.5/5 (2)
- Digital Transformation: Survive and Thrive in an Era of Mass ExtinctionDari EverandDigital Transformation: Survive and Thrive in an Era of Mass ExtinctionPenilaian: 4.5 dari 5 bintang4.5/5 (9)
- Schaum's Outline of Basic Electricity, Second EditionDari EverandSchaum's Outline of Basic Electricity, Second EditionPenilaian: 5 dari 5 bintang5/5 (14)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsDari EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsBelum ada peringkat
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4 dari 5 bintang4/5 (331)
- Teach Yourself Electricity and Electronics, 6th EditionDari EverandTeach Yourself Electricity and Electronics, 6th EditionPenilaian: 3.5 dari 5 bintang3.5/5 (15)
- Build Your Own Electronics WorkshopDari EverandBuild Your Own Electronics WorkshopPenilaian: 3.5 dari 5 bintang3.5/5 (3)
- DIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesDari EverandDIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesPenilaian: 3.5 dari 5 bintang3.5/5 (3)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignDari EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignBelum ada peringkat
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldDari EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldPenilaian: 4 dari 5 bintang4/5 (87)