Anda mungkin juga menyukai
- Caracterizacao Da Rede Da EDM - 2010Dokumen52 halamanCaracterizacao Da Rede Da EDM - 2010ArturMauta100% (1)
- AverdadeDokumen2 halamanAverdadeArturMautaBelum ada peringkat
- Grupo 8Dokumen13 halamanGrupo 8ArturMautaBelum ada peringkat
- Apostila Visu Alg 20Dokumen29 halamanApostila Visu Alg 20ArturMautaBelum ada peringkat
- ASIO4ALL v2 Instruction ManualDokumen15 halamanASIO4ALL v2 Instruction ManualArturMautaBelum ada peringkat
- Sistemas de excitação de geradores síncronos: evolução e configuraçõesDokumen21 halamanSistemas de excitação de geradores síncronos: evolução e configuraçõespctelecombrBelum ada peringkat
- AterramentoDokumen27 halamanAterramentoJonis SantosBelum ada peringkat
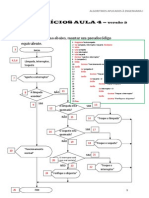
- Exercicios Pseudocodigo e Fluxograma Aula 4 v3 GabaritoDokumen7 halamanExercicios Pseudocodigo e Fluxograma Aula 4 v3 GabaritoRonaldo RoqueBelum ada peringkat
- Averdadeed508 Sex 24 08 18Dokumen5 halamanAverdadeed508 Sex 24 08 18ArturMautaBelum ada peringkat
- Portugol1.4.1.2. Identificadores de VariáveisDokumen9 halamanPortugol1.4.1.2. Identificadores de VariáveisjarbesBelum ada peringkat
- Slides - 04.x - SolucoesDokumen66 halamanSlides - 04.x - SolucoesArturMautaBelum ada peringkat
- 02 Teoria Clc3a1ssica1Dokumen20 halaman02 Teoria Clc3a1ssica1ArturMautaBelum ada peringkat
- Tema 4 Planeamento EmpresarialDokumen19 halamanTema 4 Planeamento EmpresarialArturMautaBelum ada peringkat
- Slides - 04.x - Solucoes PDFDokumen18 halamanSlides - 04.x - Solucoes PDFIsaac NogueiraBelum ada peringkat
- Direito Empresarial II: Aval e seus aspectos legaisDokumen1 halamanDireito Empresarial II: Aval e seus aspectos legaisArturMautaBelum ada peringkat
- Eq1 1 2 1 2 Eq2 Eq1 3 Eq Eq2 4 Eq2 4Dokumen3 halamanEq1 1 2 1 2 Eq2 Eq1 3 Eq Eq2 4 Eq2 4ArturMautaBelum ada peringkat
- Aula Pratica 1 - Controle Automatico 3ano-Agosto 2015Dokumen4 halamanAula Pratica 1 - Controle Automatico 3ano-Agosto 2015ArturMautaBelum ada peringkat
- Averdadeed509 Qua 29 08 18Dokumen4 halamanAverdadeed509 Qua 29 08 18ArturMautaBelum ada peringkat
- CI 555 - Aplicações e circuitosDokumen7 halamanCI 555 - Aplicações e circuitosHamdan666Belum ada peringkat
- Averdadeed508 Qui 23 08 18Dokumen3 halamanAverdadeed508 Qui 23 08 18ArturMautaBelum ada peringkat
- Catalogo de Mostradores DigitaisDokumen2 halamanCatalogo de Mostradores DigitaisArturMautaBelum ada peringkat
- Especificação DPSDokumen74 halamanEspecificação DPSFernando OliveiraBelum ada peringkat
- Correcao EeDokumen5 halamanCorrecao EeArturMautaBelum ada peringkat
- HeltonDokumen7 halamanHeltonArturMautaBelum ada peringkat
- Pe DR L Rumble (M.S.C) - Só Os Católicos Se Salvam¿ - Edição de 1959 - 32 PágsDokumen32 halamanPe DR L Rumble (M.S.C) - Só Os Católicos Se Salvam¿ - Edição de 1959 - 32 PágskrcodinBelum ada peringkat
- Circuitos Integrados LivrocompletoDokumen171 halamanCircuitos Integrados LivrocompletoZebuscapeBelum ada peringkat
- Medição de pressão com instrumentos de referênciaDokumen53 halamanMedição de pressão com instrumentos de referênciaArturMautaBelum ada peringkat
- Sistemas de Excitacao Dos SincronosDokumen5 halamanSistemas de Excitacao Dos SincronosArturMautaBelum ada peringkat
- 07 Sistemas Controle Sistemas Segunda Ordem Ilang 20180406181612Dokumen50 halaman07 Sistemas Controle Sistemas Segunda Ordem Ilang 20180406181612André MusselBelum ada peringkat
- Lista de Exercício - Cap4 - Nise22Dokumen5 halamanLista de Exercício - Cap4 - Nise22Breno Vinheiros MirandaBelum ada peringkat
- Espaços de Estados - Alocação de PólosDokumen13 halamanEspaços de Estados - Alocação de PólosAnderson Marques LealBelum ada peringkat
- Sistemas de controle por diagramas de blocosDokumen45 halamanSistemas de controle por diagramas de blocosPedro Minante100% (1)
- Sistemas de controle e transformada de LaplaceDokumen20 halamanSistemas de controle e transformada de LaplaceGabriel RamosBelum ada peringkat
- p1 Controle AulasDokumen135 halamanp1 Controle AulasjoaoreniBelum ada peringkat
- Modelagem de Sistemas na FrequênciaDokumen100 halamanModelagem de Sistemas na FrequênciaJosandersonDalmasoJosandersonBelum ada peringkat
- Resumo Cap 3 (Ivo Leoni)Dokumen19 halamanResumo Cap 3 (Ivo Leoni)Ivo LeoniBelum ada peringkat
- Controle digital de sistemas com PI e análise de estabilidadeDokumen10 halamanControle digital de sistemas com PI e análise de estabilidadeLuísa GonçalvesBelum ada peringkat
- Atividade Pratica - Controle ContinuoDokumen9 halamanAtividade Pratica - Controle ContinuoAprovouBelum ada peringkat
- Modelos Matem - Ticos de Sistemas de ControleDokumen36 halamanModelos Matem - Ticos de Sistemas de ControleSamuel GamonalBelum ada peringkat
- Discretização de controladores usando métodos de Forward, Backward e TustinDokumen7 halamanDiscretização de controladores usando métodos de Forward, Backward e TustinThiago WerneckBelum ada peringkat
- Teoria de Controle Aula 1Dokumen21 halamanTeoria de Controle Aula 1Rodrigo BarrosBelum ada peringkat
- 5 Função de Transferência e Diagrama de Blocos-Atualizado em 28-03-2019Dokumen92 halaman5 Função de Transferência e Diagrama de Blocos-Atualizado em 28-03-2019Alan ModestoBelum ada peringkat
- Controle ServomecanismoDokumen7 halamanControle ServomecanismoMichellThompsonMataBelum ada peringkat
- Sistemas de Controle AutomáticoDokumen22 halamanSistemas de Controle AutomáticoRaquel BarbosaBelum ada peringkat
- Controle de Processos Químicos: Estabilidade de Sistemas de Controle Routh-HurwitzDokumen28 halamanControle de Processos Químicos: Estabilidade de Sistemas de Controle Routh-HurwitzGnu_saraBelum ada peringkat
- 5-Controle-I-Modelagem Matemática de Sistemas Elétricos e Mecânicos PDFDokumen36 halaman5-Controle-I-Modelagem Matemática de Sistemas Elétricos e Mecânicos PDFLucas NunesBelum ada peringkat
- Sistemas de controle de processo CSTRDokumen3 halamanSistemas de controle de processo CSTRRubiane Ganascim MarquesBelum ada peringkat
- Processamento de Sinais IDokumen3 halamanProcessamento de Sinais Iamerico079Belum ada peringkat
- Sistemas de Controle Realimentado (Apostila Aniel)Dokumen131 halamanSistemas de Controle Realimentado (Apostila Aniel)Gustavo DomingosBelum ada peringkat
- Lista de Exercício Cap2 NiseDokumen3 halamanLista de Exercício Cap2 NiseBreno Vinheiros MirandaBelum ada peringkat
- Introdução à Modelagem e Simulação de Sistemas DinâmicosDokumen16 halamanIntrodução à Modelagem e Simulação de Sistemas DinâmicossergiojgsBelum ada peringkat
- Reaquecimento de vapor aumenta eficiência de ciclo termelétricoDokumen4 halamanReaquecimento de vapor aumenta eficiência de ciclo termelétricoCésar Roberto Nascimento GuimarãesBelum ada peringkat
- Controle de sistemas elétricos e térmicosDokumen3 halamanControle de sistemas elétricos e térmicosLeo WilliamBelum ada peringkat
- Aula 12 Laplace2Dokumen42 halamanAula 12 Laplace2Gustavo SantanaBelum ada peringkat
- Modelagem Espaço EstadosDokumen10 halamanModelagem Espaço EstadosPauloBelum ada peringkat
- Guia Rápido - LTSpiceDokumen28 halamanGuia Rápido - LTSpiceFalco BiarmicusBelum ada peringkat