Anda mungkin juga menyukai
- Homework#1Dokumen2 halamanHomework#1Sofia Lively100% (5)
- Operating Systems CSE451 Spring 2000: Instructor: Gary Kimura Slides Courtesy of Hank LevyDokumen14 halamanOperating Systems CSE451 Spring 2000: Instructor: Gary Kimura Slides Courtesy of Hank Levyreal basBelum ada peringkat
- Dasd 1123Dokumen528 halamanDasd 1123real basBelum ada peringkat
- Fotos Leu LinksDokumen1 halamanFotos Leu Linksreal basBelum ada peringkat
- Use Case Spec - Withdraw CashDokumen4 halamanUse Case Spec - Withdraw CashAnshul MahajanBelum ada peringkat
- Use Case Spec - Withdraw CashDokumen4 halamanUse Case Spec - Withdraw CashAnshul MahajanBelum ada peringkat
- Operating Systems CSE451 Spring 2000: Instructor: Gary Kimura Slides Courtesy of Hank LevyDokumen14 halamanOperating Systems CSE451 Spring 2000: Instructor: Gary Kimura Slides Courtesy of Hank Levyreal basBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Tales Themselves - An Overview by Dr. Anna ChallengerDokumen15 halamanThe Tales Themselves - An Overview by Dr. Anna Challengerhimkeraditya100% (2)
- Balkh and the Sasanians: Insights from Bactrian Economic DocumentsDokumen21 halamanBalkh and the Sasanians: Insights from Bactrian Economic DocumentsDonna HallBelum ada peringkat
- Document 1153444.1Dokumen4 halamanDocument 1153444.1Ferocci FerozBelum ada peringkat
- CSTP 4 Planning Instruction & Designing Learning ExperiencesDokumen8 halamanCSTP 4 Planning Instruction & Designing Learning ExperiencesCharlesBelum ada peringkat
- Literature Presentation by Yasmine RamosDokumen76 halamanLiterature Presentation by Yasmine Ramosenimsay somarBelum ada peringkat
- Higher Nationals in Computing: Unit 19: Data Structures and Algorithms Assignment 1Dokumen41 halamanHigher Nationals in Computing: Unit 19: Data Structures and Algorithms Assignment 1Nguyen Manh Hiep Long (FGW HCM)100% (1)
- Manufacturing Foundation R18A Student GuideDokumen307 halamanManufacturing Foundation R18A Student GuideVictor MillanBelum ada peringkat
- Western Philosophy - PPT Mar 7Dokumen69 halamanWestern Philosophy - PPT Mar 7Hazel Joy UgatesBelum ada peringkat
- Gatsby's False Prophecy of the American DreamDokumen14 halamanGatsby's False Prophecy of the American DreamDorottya MagyarBelum ada peringkat
- 12-AS400 Schedule Job (09nov15)Dokumen5 halaman12-AS400 Schedule Job (09nov15)Mourad TimarBelum ada peringkat
- Vocabulary for Weather and Natural PhenomenaDokumen4 halamanVocabulary for Weather and Natural PhenomenaSempredijousBelum ada peringkat
- Christmas The Readings From The Nine Lessons and CarolsDokumen7 halamanChristmas The Readings From The Nine Lessons and CarolsLen SalisburyBelum ada peringkat
- Grossberg, Lawrence - Strategies of Marxist Cultural Interpretation - 1997Dokumen40 halamanGrossberg, Lawrence - Strategies of Marxist Cultural Interpretation - 1997jessenigBelum ada peringkat
- 4 Best Ways To Find Blocking Sessions in Oracle 11gDokumen5 halaman4 Best Ways To Find Blocking Sessions in Oracle 11gMa GodfreyBelum ada peringkat
- Data Stage FaqsDokumen47 halamanData Stage FaqsVamsi Krishna EmanyBelum ada peringkat
- 47 QM-013 Master Inspection CharacteristicsDokumen7 halaman47 QM-013 Master Inspection CharacteristicsElanBelum ada peringkat
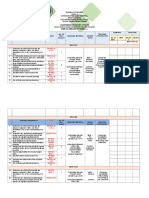
- Sta. Ana National High School English Learning Competencies ChecklistDokumen6 halamanSta. Ana National High School English Learning Competencies Checklistshirney naelga escabarte50% (2)
- CSSE501 Inheritance and SubstitutionDokumen30 halamanCSSE501 Inheritance and Substitutionsaleem010Belum ada peringkat
- US Navy Course NAVEDTRA 12012 - HarmonyDokumen112 halamanUS Navy Course NAVEDTRA 12012 - HarmonyGeorges100% (2)
- Alcatel 1641 SX OptinexDokumen6 halamanAlcatel 1641 SX OptinexCarlos Higa100% (1)
- Unit 8 General Test: Describe The PictureDokumen12 halamanUnit 8 General Test: Describe The PictureHermes Orozco100% (1)
- Feg-1/Begf-101: Foundation Course in English-1Dokumen6 halamanFeg-1/Begf-101: Foundation Course in English-1Riyance SethBelum ada peringkat
- 60 TOP C LANGUAGE Multiple Choice Questions and Answers pdfDokumen41 halaman60 TOP C LANGUAGE Multiple Choice Questions and Answers pdfSiddharth SidhuBelum ada peringkat
- JavaScript Unit Testing Tools Cheat SheetDokumen3 halamanJavaScript Unit Testing Tools Cheat SheetHéla Ben KhalfallahBelum ada peringkat
- Cisco ITP 7600 Product - Data - SheetDokumen9 halamanCisco ITP 7600 Product - Data - SheetbrunolacosteBelum ada peringkat
- Romanian Mathematical Magazine 39Dokumen169 halamanRomanian Mathematical Magazine 39Nawar AlasadiBelum ada peringkat
- 2 enDokumen141 halaman2 enNițceValiBelum ada peringkat
- Sol ArcDokumen26 halamanSol ArcpatilparagossBelum ada peringkat
- 103778-San Ignacio Elementary School: Department of Education Region 02 (Cagayan Valley)Dokumen1 halaman103778-San Ignacio Elementary School: Department of Education Region 02 (Cagayan Valley)efraem reyesBelum ada peringkat
- Detailed English Lesson on Personal ConflictsDokumen5 halamanDetailed English Lesson on Personal ConflictsMichael GreenBelum ada peringkat