Anda mungkin juga menyukai
- Process Dynamics and Control Chapter - 1Dokumen44 halamanProcess Dynamics and Control Chapter - 1MustafaBelum ada peringkat
- Chapter 1Dokumen102 halamanChapter 1Anonymous EBReO8vBelum ada peringkat
- Introduction To Process ControlDokumen30 halamanIntroduction To Process ControlnadyahginiceBelum ada peringkat
- Process Control NotesDokumen30 halamanProcess Control NotesRyle ArbonBelum ada peringkat
- Chapter - 1 - Introduction To Process ControlDokumen40 halamanChapter - 1 - Introduction To Process ControlSuraya JohariBelum ada peringkat
- Chapter 1: Introduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingDokumen35 halamanChapter 1: Introduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingaliBelum ada peringkat
- Introduction To Process ControlDokumen16 halamanIntroduction To Process Control李承家Belum ada peringkat
- Process Control IntroDokumen21 halamanProcess Control Introحاتم غيدان خلفBelum ada peringkat
- Introduction To Process ControlDokumen29 halamanIntroduction To Process ControlSalih Ahmed ObeidBelum ada peringkat
- Introduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingDokumen35 halamanIntroduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingaaaBelum ada peringkat
- Process ControlDokumen20 halamanProcess Controlgongweejie100% (1)
- Chapter 1Dokumen17 halamanChapter 1Ahmed Hassan RashedBelum ada peringkat
- Introduction To Process ControlDokumen28 halamanIntroduction To Process ControlFajar AdityadarmaBelum ada peringkat
- l1c1 PC TMR Fall23Dokumen28 halamanl1c1 PC TMR Fall23zubairnaeem 92Belum ada peringkat
- Chapter 1Dokumen27 halamanChapter 1Izzat FakhriBelum ada peringkat
- Chapter 1Dokumen30 halamanChapter 1julior87Belum ada peringkat
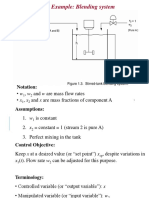
- Lec 2 ExampleDokumen9 halamanLec 2 ExamplemmBelum ada peringkat
- Feed-Forward and Ratio Control: CHME 624 Advance Process Dynamic Modelling & ControlDokumen13 halamanFeed-Forward and Ratio Control: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriBelum ada peringkat
- Multiloop and Multivariable Control PDFDokumen43 halamanMultiloop and Multivariable Control PDFVaibhav AhujaBelum ada peringkat
- Introduction To Chemical Process Dynamics and Control: Dr. Farooq AhmadDokumen44 halamanIntroduction To Chemical Process Dynamics and Control: Dr. Farooq AhmadAhmadJaffarGulfarazBelum ada peringkat
- HCHE 322 Lecture 1 - IntroductionDokumen8 halamanHCHE 322 Lecture 1 - IntroductionBrian MasauliBelum ada peringkat
- Seborg Process Control Chapter 1Dokumen50 halamanSeborg Process Control Chapter 1Tanvir AhmedBelum ada peringkat
- Class Rules: CENG 4120: Process Dynamics and ControlDokumen14 halamanClass Rules: CENG 4120: Process Dynamics and ControlIvan ChanBelum ada peringkat
- Controller Tuning: Dr. Nagajyothi VirivintiDokumen23 halamanController Tuning: Dr. Nagajyothi VirivintiNagajyothiVirivintiBelum ada peringkat
- Introduction To Process Control & Mathematical Modelling 1.0 What Is A Control System?Dokumen11 halamanIntroduction To Process Control & Mathematical Modelling 1.0 What Is A Control System?gongweejieBelum ada peringkat
- Lecture-4 - MIMO-SISO - Process VariablesDokumen16 halamanLecture-4 - MIMO-SISO - Process VariablesKshitij SoniBelum ada peringkat
- Introduction To Process Instrumentation & ControlDokumen44 halamanIntroduction To Process Instrumentation & ControlMasrihan Abu HasanBelum ada peringkat
- Process Dynamics & Control: TextbookDokumen16 halamanProcess Dynamics & Control: TextbookMohammed FaiqBelum ada peringkat
- Coupled Tank - MPCDokumen6 halamanCoupled Tank - MPCMutiara PurnamaBelum ada peringkat
- Lecture-5 - Classification of Process Variables - Control StrategiesDokumen18 halamanLecture-5 - Classification of Process Variables - Control StrategiesKshitij SoniBelum ada peringkat
- ENCH 442: Chemical Process Control and SafetyDokumen16 halamanENCH 442: Chemical Process Control and SafetyCharlie CB PortnerBelum ada peringkat
- Multi Variable ControlsDokumen17 halamanMulti Variable ControlsJivashiniBalasupurManiamBelum ada peringkat
- PClesson 01 IntroDokumen4 halamanPClesson 01 IntroBhabanirajasBelum ada peringkat
- CPB 30004 - CHAPTER 1 - INTRO Sept 2014Dokumen52 halamanCPB 30004 - CHAPTER 1 - INTRO Sept 2014Ashwin MBelum ada peringkat
- PC Lessons On Process ControlDokumen156 halamanPC Lessons On Process ControlNsidibe Michael EtimBelum ada peringkat
- 2018-2019 Process Dynamic and Control (Covenant University)Dokumen108 halaman2018-2019 Process Dynamic and Control (Covenant University)ElijahBelum ada peringkat
- 7765 - 1-PWC Pengenalan (8feb18)Dokumen32 halaman7765 - 1-PWC Pengenalan (8feb18)Riski FBelum ada peringkat
- Robust Control (/sliding Mode Controller) With An Application To Multi-Input Power System StabilisationDokumen9 halamanRobust Control (/sliding Mode Controller) With An Application To Multi-Input Power System StabilisationSherif HelmyBelum ada peringkat
- PDC Compilation PDFDokumen87 halamanPDC Compilation PDFScrappy WellBelum ada peringkat
- One-Cycle Control of Switching ConvertersDokumen9 halamanOne-Cycle Control of Switching ConvertersspschulzBelum ada peringkat
- Process Control 3Dokumen18 halamanProcess Control 3jeedBelum ada peringkat
- Lec02 Math Foundation1Dokumen5 halamanLec02 Math Foundation1Adit 0110Belum ada peringkat
- CH15818 NotesDokumen2 halamanCH15818 NotesHannah Adelaiynne GeromoBelum ada peringkat
- One-Cycle Control of Switching Converters: GroupDokumen9 halamanOne-Cycle Control of Switching Converters: GroupAnonymous Z1RHn9EBelum ada peringkat
- cpc6 Larsson TeDokumen5 halamancpc6 Larsson TeSergio OrtizBelum ada peringkat
- Instrumentation and Process Control - QRCDokumen39 halamanInstrumentation and Process Control - QRCConrad MonterolaBelum ada peringkat
- Control Systems Week 1Dokumen67 halamanControl Systems Week 1Mahmoud AliBelum ada peringkat
- ELM 322, Control Systems Control Systems Spring 2015Dokumen37 halamanELM 322, Control Systems Control Systems Spring 2015kaanBelum ada peringkat
- 8 Control Basics PDFDokumen79 halaman8 Control Basics PDFshihabBelum ada peringkat
- Process Control NotesDokumen178 halamanProcess Control Notesabdulrhman aljuaydi100% (1)
- Dynamics. Openloop Closedloop: ZyxwvutsrqponmlkjihgfedcbazyxwvutsrqponmlkjihgfedcbaDokumen4 halamanDynamics. Openloop Closedloop: ZyxwvutsrqponmlkjihgfedcbazyxwvutsrqponmlkjihgfedcbalordyBelum ada peringkat
- Barhoumi 2016Dokumen5 halamanBarhoumi 2016Jaja LocoBelum ada peringkat
- Thermodynamics Concepts: The Copperbelt UniversityDokumen44 halamanThermodynamics Concepts: The Copperbelt UniversityLennox SiwaleBelum ada peringkat
- Chapter 13Dokumen16 halamanChapter 13李承家Belum ada peringkat
- Analysis and Control Design of Two Cascaded BoostDokumen6 halamanAnalysis and Control Design of Two Cascaded BoostTamilselvanBelum ada peringkat
- Expi Psych Chap 11-13Dokumen7 halamanExpi Psych Chap 11-13Morish Roi YacasBelum ada peringkat
- L18 MultivariableDokumen22 halamanL18 Multivariabletaufiqurrahman mohd yunusBelum ada peringkat
- Instrumentation and Process Control (IPC) : by Dr. Sikander Rafiq Department of Chemical EngineeringDokumen46 halamanInstrumentation and Process Control (IPC) : by Dr. Sikander Rafiq Department of Chemical EngineeringUmar ShehroozBelum ada peringkat
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDari EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsBelum ada peringkat
- PRACTICE PROBLEMS - EquilibriumDokumen2 halamanPRACTICE PROBLEMS - EquilibriumMarie Angeline BautistaBelum ada peringkat
- Naming and Writing Chemical FormulaDokumen8 halamanNaming and Writing Chemical FormulaMarie Angeline BautistaBelum ada peringkat
- CHM021 Mole ProblemsDokumen4 halamanCHM021 Mole ProblemsMarie Angeline BautistaBelum ada peringkat
- CHM021 Atomic ModelsDokumen6 halamanCHM021 Atomic ModelsMarie Angeline BautistaBelum ada peringkat
- Gases: - Jan Baptista Van Helmont "Chaos" - GasDokumen6 halamanGases: - Jan Baptista Van Helmont "Chaos" - GasMarie Angeline BautistaBelum ada peringkat
- CHM021 IntroDokumen3 halamanCHM021 IntroMarie Angeline BautistaBelum ada peringkat
- FourierDokumen34 halamanFourierMarie Angeline BautistaBelum ada peringkat
- Exercises Format GuideDokumen3 halamanExercises Format GuideMarie Angeline BautistaBelum ada peringkat
- Problem Set Stress StrainDokumen4 halamanProblem Set Stress StrainMarie Angeline Bautista100% (1)
- Graphs (Settling)Dokumen4 halamanGraphs (Settling)Marie Angeline BautistaBelum ada peringkat
- Reynold's Number of Non-Spherical ParticlesDokumen1 halamanReynold's Number of Non-Spherical ParticlesMarie Angeline BautistaBelum ada peringkat
- CHM150 OrientationDokumen22 halamanCHM150 OrientationMarie Angeline BautistaBelum ada peringkat
- Units and Dimensions - 6863772 PDFDokumen146 halamanUnits and Dimensions - 6863772 PDFAnonymous WI0nbsBelum ada peringkat
- BNC Ingredients CorporationDokumen1 halamanBNC Ingredients CorporationMarie Angeline BautistaBelum ada peringkat
- Exercise Ch26#46Dokumen1 halamanExercise Ch26#46Marie Angeline BautistaBelum ada peringkat
- ProCon Finals NotesDokumen6 halamanProCon Finals NotesMarie Angeline BautistaBelum ada peringkat
- Practice Exercise PDFDokumen1 halamanPractice Exercise PDFMarie Angeline BautistaBelum ada peringkat
- Ipa A CaretDokumen5 halamanIpa A CaretMarie Angeline BautistaBelum ada peringkat
- Practice - Forces in SpaceDokumen3 halamanPractice - Forces in SpaceMarie Angeline BautistaBelum ada peringkat
- Problem Set 4B-Equil of Particle-3dDokumen5 halamanProblem Set 4B-Equil of Particle-3dMarie Angeline BautistaBelum ada peringkat
- Problem Set 1Dokumen1 halamanProblem Set 1Marie Angeline BautistaBelum ada peringkat
- Exercise Ch29#47Dokumen1 halamanExercise Ch29#47Marie Angeline BautistaBelum ada peringkat
- The Nature and Importance of EconomicsDokumen54 halamanThe Nature and Importance of EconomicsMarie Angeline BautistaBelum ada peringkat
- HW Stoich1Dokumen1 halamanHW Stoich1Marie Angeline BautistaBelum ada peringkat
- MATH021 - 3T - 2014-2015 - PROBLEM SET-1 Long Exam: Range of EachDokumen3 halamanMATH021 - 3T - 2014-2015 - PROBLEM SET-1 Long Exam: Range of EachMarie Angeline BautistaBelum ada peringkat
- Structure and Function in PeperoDokumen2 halamanStructure and Function in PeperoMarie Angeline BautistaBelum ada peringkat
- Exercise Ch22#37Dokumen1 halamanExercise Ch22#37Marie Angeline BautistaBelum ada peringkat
- HW - 8 - 8 Method of JointsDokumen1 halamanHW - 8 - 8 Method of JointsMarie Angeline BautistaBelum ada peringkat
- Passmore Et Al (2019) Workplace CoachingDokumen47 halamanPassmore Et Al (2019) Workplace CoachingMalarvilie KrishnasamyBelum ada peringkat
- Fire Alarm SymbolsDokumen6 halamanFire Alarm Symbolscarlos vasquezBelum ada peringkat
- Law of DemandDokumen16 halamanLaw of DemandARUN KUMARBelum ada peringkat
- Anatomy & Physiology MCQsDokumen26 halamanAnatomy & Physiology MCQsMuskan warisBelum ada peringkat
- Century Vemap PDFDokumen5 halamanCentury Vemap PDFMaster MirrorBelum ada peringkat
- Silenat Berhanu SimaDokumen6 halamanSilenat Berhanu SimaSilenat BerhanuBelum ada peringkat
- Avinash Uttareshwar MeherDokumen6 halamanAvinash Uttareshwar MeheravinashBelum ada peringkat
- LogDokumen67 halamanLogRudhi Al GhaisanBelum ada peringkat
- Studi Tentang Pelayanan Terhadap Kapal Perikanan Di Pelabuhan Perikanan Pantai (PPP) Tumumpa Kota ManadoDokumen9 halamanStudi Tentang Pelayanan Terhadap Kapal Perikanan Di Pelabuhan Perikanan Pantai (PPP) Tumumpa Kota ManadoAri WibowoBelum ada peringkat
- Xgenus X-Ray PDFDokumen61 halamanXgenus X-Ray PDFAli NuriBelum ada peringkat
- 93c3 Document 3Dokumen14 halaman93c3 Document 3NONON NICOLASBelum ada peringkat
- Cusps: Ramesh 04-Jun-1976 12:30:00 PM Krishnagiri 78:14:0 E, 12:32:0 N Tzone: 5.5 KP (Original) Ayanamsha 23:26:2Dokumen1 halamanCusps: Ramesh 04-Jun-1976 12:30:00 PM Krishnagiri 78:14:0 E, 12:32:0 N Tzone: 5.5 KP (Original) Ayanamsha 23:26:2Suresh NatarajanBelum ada peringkat
- Analytical Chemistry (CHM111) Laboratory ManualDokumen73 halamanAnalytical Chemistry (CHM111) Laboratory ManualKatrina BucudBelum ada peringkat
- Canadian-Solar Datasheet Inverter 3ph 75-100KDokumen2 halamanCanadian-Solar Datasheet Inverter 3ph 75-100KItaloBelum ada peringkat
- TCS3400 DS000411 4-00Dokumen34 halamanTCS3400 DS000411 4-00Miguel_Angel92Belum ada peringkat
- Individual Performance Commitment and Review Form (Ipcrf) : Annex EDokumen8 halamanIndividual Performance Commitment and Review Form (Ipcrf) : Annex Emenzi magnoBelum ada peringkat
- Bhaktavatsalam Memorial College For Women: Hand Book 2020 - 21Dokumen37 halamanBhaktavatsalam Memorial College For Women: Hand Book 2020 - 21Anu RsBelum ada peringkat
- Secondary GeographyDokumen127 halamanSecondary GeographyAbcdBelum ada peringkat
- IPE SakibBhaiMagicChothaDokumen55 halamanIPE SakibBhaiMagicChothaTousif SadmanBelum ada peringkat
- 2022 Cement Lime Manufacturing Ehs Guidelines enDokumen39 halaman2022 Cement Lime Manufacturing Ehs Guidelines enSamiBelum ada peringkat
- Enterpreneurship Assignment 2Dokumen8 halamanEnterpreneurship Assignment 2Khusbu JaiswalBelum ada peringkat
- Prof Ed 9-A - Module 6 - Tumacder, DHMLDokumen6 halamanProf Ed 9-A - Module 6 - Tumacder, DHMLDanica Hannah Mae TumacderBelum ada peringkat
- Which Will Weigh The Least Without AnswerDokumen7 halamanWhich Will Weigh The Least Without AnswerumeshBelum ada peringkat
- Budget of Work Inquiries Investigations and Immersion 19 20Dokumen1 halamanBudget of Work Inquiries Investigations and Immersion 19 20alma florBelum ada peringkat
- One Wavelength To Loop SkywireDokumen2 halamanOne Wavelength To Loop SkywireRobert TurnerBelum ada peringkat
- Alderamin On The Sky - Volume 7Dokumen311 halamanAlderamin On The Sky - Volume 7Pedro SilvaBelum ada peringkat
- Module 3: Literature Review and CitationDokumen3 halamanModule 3: Literature Review and CitationLysss EpssssBelum ada peringkat
- Evs ManualDokumen24 halamanEvs ManualJoseph TuckerBelum ada peringkat