Anda mungkin juga menyukai
- Anatomía aplicada a la actividad física y deportivaDari EverandAnatomía aplicada a la actividad física y deportivaPenilaian: 4.5 dari 5 bintang4.5/5 (7)
- Manual práctico de biomecánica del pie: Consejos básicos para el autoaprendizajeDari EverandManual práctico de biomecánica del pie: Consejos básicos para el autoaprendizajePenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Biomecania Del Hombro (3momento)Dokumen46 halamanBiomecania Del Hombro (3momento)Andrés MartínezBelum ada peringkat
- Sitios y Técnica de Medición Antropométrica Isak - Nivel 1 PDFDokumen16 halamanSitios y Técnica de Medición Antropométrica Isak - Nivel 1 PDFTaylor MkuteBelum ada peringkat
- Sitios y Técnica de Medición Antropométrica Nivel 2 Isak-MedellínDokumen25 halamanSitios y Técnica de Medición Antropométrica Nivel 2 Isak-MedellínCristian Constantaco100% (1)
- Mapa ConceptualDokumen4 halamanMapa ConceptualEduardo PerezBelum ada peringkat
- 1 Monografia Final de Biomecánica ArticularDokumen25 halaman1 Monografia Final de Biomecánica ArticularAlvaro SaensBelum ada peringkat
- Guia PosturaDokumen13 halamanGuia PosturaValery GarciaBelum ada peringkat
- Trab 1Dokumen7 halamanTrab 1gloriaespansorBelum ada peringkat
- Telerradiografía de Extremidades InferioresDokumen24 halamanTelerradiografía de Extremidades InferioresMaxi Reyes VidalBelum ada peringkat
- Actividad 1 Anatomia RadiologicaDokumen6 halamanActividad 1 Anatomia Radiologicaender del cristo suarez martinezBelum ada peringkat
- GONIOMETRIADokumen15 halamanGONIOMETRIAMARCELO RENATO VARGAS CASTROBelum ada peringkat
- Practica Planos Sagitales y EjesDokumen19 halamanPractica Planos Sagitales y Ejesl21920169Belum ada peringkat
- GONIOMETRIADokumen15 halamanGONIOMETRIAMARCELO RENATO VARGAS CASTROBelum ada peringkat
- Guía ISAK 1 PDFDokumen16 halamanGuía ISAK 1 PDFValeria Palta100% (5)
- Informe de FisiologíaDokumen11 halamanInforme de FisiologíaKatherine Pilar Carrillo ManayayBelum ada peringkat
- Biomecanica - El Cuerpo Humano y Sus MovimientosDokumen9 halamanBiomecanica - El Cuerpo Humano y Sus MovimientosLa PandorgaBelum ada peringkat
- Anatomía Dinámica Del AtlasDokumen10 halamanAnatomía Dinámica Del AtlasYuli OrtizBelum ada peringkat
- Clase #9 y 10 Goniometria, Planos - Ejes y Ev MuscularDokumen56 halamanClase #9 y 10 Goniometria, Planos - Ejes y Ev MuscularEstefanny Mejias Ordenes100% (1)
- Tarea 2 - Creación de Protocolos.Dokumen5 halamanTarea 2 - Creación de Protocolos.eternativa.777Belum ada peringkat
- Descript-Tipos de Movim. 2020Dokumen15 halamanDescript-Tipos de Movim. 2020juanvallejossaoBelum ada peringkat
- Telerradiografía de Extremidades InferioresDokumen17 halamanTelerradiografía de Extremidades InferioresMaxi Reyes Vidal100% (1)
- Analisis de Bipedestación y MarchaDokumen11 halamanAnalisis de Bipedestación y MarchaMichael AriasBelum ada peringkat
- Introducción A La Mecánica CorporalDokumen13 halamanIntroducción A La Mecánica CorporalMaria Paula Chavarro CardenasBelum ada peringkat
- Estudio Biomecanico de La ASADokumen15 halamanEstudio Biomecanico de La ASAElena Pérez MuñozBelum ada peringkat
- 01 Anatomía FuncionalDokumen36 halaman01 Anatomía FuncionalAbraham Medina100% (1)
- Clases BiomecanicaDokumen183 halamanClases BiomecanicaLizeth JerezBelum ada peringkat
- Introduccion A La Anatomia-1 Trayecto 0005-0008Dokumen4 halamanIntroduccion A La Anatomia-1 Trayecto 0005-0008TrayBelum ada peringkat
- Clase 01 Generalidades Anatomia - DBIO1050Dokumen22 halamanClase 01 Generalidades Anatomia - DBIO1050L Carvallo MiguelBelum ada peringkat
- Clase 01 Generalidades Anatomia - DMOR0003Dokumen23 halamanClase 01 Generalidades Anatomia - DMOR0003Bis Tro CalbucoBelum ada peringkat
- Anatomía de La Columna VertebralDokumen36 halamanAnatomía de La Columna Vertebralkarenmr013Belum ada peringkat
- Huaroto Luis - Cirugia Ortopedica Y Traumatologica IIDokumen192 halamanHuaroto Luis - Cirugia Ortopedica Y Traumatologica IImappetchileBelum ada peringkat
- Abp TomoDokumen331 halamanAbp TomoLorena López CoreaBelum ada peringkat
- Valoración de Goniometría ArticularDokumen40 halamanValoración de Goniometría ArticularitachiBelum ada peringkat
- El Pulgar MonografíaDokumen46 halamanEl Pulgar MonografíaMaziel MoralesBelum ada peringkat
- Muñeca y Mano Examen ArticularDokumen19 halamanMuñeca y Mano Examen Articularjose A100% (7)
- Análisis de Un Movimiento2Dokumen9 halamanAnálisis de Un Movimiento2Anto AlmacheBelum ada peringkat
- NAtacionDokumen5 halamanNAtacionEnrique GranadosBelum ada peringkat
- Test PosturalDokumen17 halamanTest PosturalGabi Ro100% (1)
- Antropometria Estática y DinámicaDokumen9 halamanAntropometria Estática y DinámicaCesar AntonioBelum ada peringkat
- Biomecánica Del Miembro Inferior PARA PODOLOGOS COTMED 01Dokumen333 halamanBiomecánica Del Miembro Inferior PARA PODOLOGOS COTMED 01jorge wilson henao morenoBelum ada peringkat
- Manual de Ortopedia y Traumatologia AbpDokumen345 halamanManual de Ortopedia y Traumatologia AbpALBERTO GALLEGOBelum ada peringkat
- Charnela Funcional Mediodorsal 1 TeyssandierDokumen5 halamanCharnela Funcional Mediodorsal 1 TeyssandierCarolina VillarroelBelum ada peringkat
- Clases AnatomíaDokumen24 halamanClases AnatomíaCatalina EspinozaBelum ada peringkat
- BIOMECANICADokumen31 halamanBIOMECANICAjewiBelum ada peringkat
- Análisis Biomecánico de La MarchaDokumen48 halamanAnálisis Biomecánico de La MarchaCarlos Arce83% (12)
- Guía N°1 POSICIÓN ANATÓMICA, PLANIMETRÍA (TAVDokumen11 halamanGuía N°1 POSICIÓN ANATÓMICA, PLANIMETRÍA (TAVGerardo Morales CarrascoBelum ada peringkat
- Tarea - 1 - Eliana Camargo - 154003 - 27Dokumen14 halamanTarea - 1 - Eliana Camargo - 154003 - 27eliana camargoBelum ada peringkat
- Carrion Clase 6Dokumen28 halamanCarrion Clase 6Alexander CarrascoBelum ada peringkat
- Antologia Equipo 8Dokumen12 halamanAntologia Equipo 8KevinEduardoValeraLorenzoBelum ada peringkat
- SITIOS Y TE üCNICA DE MEDICIO Ün ANTROPOME üTRICA NIVEL 2 ISAKDokumen25 halamanSITIOS Y TE üCNICA DE MEDICIO Ün ANTROPOME üTRICA NIVEL 2 ISAKAriel GonzálezBelum ada peringkat
- Notas AnatoDokumen260 halamanNotas AnatoVianney SilvaBelum ada peringkat
- Semiología Del Aparato LocomotorDokumen9 halamanSemiología Del Aparato LocomotorDaysiBelum ada peringkat
- Posicion Atomica de La Mayra FernandaDokumen44 halamanPosicion Atomica de La Mayra Fernandamayra.leont17Belum ada peringkat
- La tonificación muscular: Teoría y prácticaDari EverandLa tonificación muscular: Teoría y prácticaPenilaian: 4 dari 5 bintang4/5 (1)
- Introducción al análisis de la marchaDari EverandIntroducción al análisis de la marchaPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Anatomía del caballo: Guía práctica ilustradaDari EverandAnatomía del caballo: Guía práctica ilustradaPenilaian: 4 dari 5 bintang4/5 (9)
- Tratamiento de datos de una batería de tests, pruebas y cuestionarios de la valoración de la condición física, biológica y motivacional. AFDA0210Dari EverandTratamiento de datos de una batería de tests, pruebas y cuestionarios de la valoración de la condición física, biológica y motivacional. AFDA0210Belum ada peringkat
- Clase 7. Osteologia Artic - Mi 2019Dokumen21 halamanClase 7. Osteologia Artic - Mi 2019hectorBelum ada peringkat
- Separata - Generalidades de AnatomiaDokumen5 halamanSeparata - Generalidades de AnatomiaAngeles Guerra FloresBelum ada peringkat
- Areas Motoras de La Corteza Cerebral PPT Hector CaballeroDokumen16 halamanAreas Motoras de La Corteza Cerebral PPT Hector CaballeroHector Isai CaballeroBelum ada peringkat
- Tabla de Ejercicios de MusculacionDokumen20 halamanTabla de Ejercicios de MusculacionGabriel d'Chiri TovarBelum ada peringkat
- HUESOSDokumen8 halamanHUESOSGLADYSBelum ada peringkat
- Lenguaje y EndocrinoDokumen7 halamanLenguaje y EndocrinoMARTIN GABRIEL ZAPATA CRISTOBALBelum ada peringkat
- Glosario Anatomía y FisiologíaDokumen5 halamanGlosario Anatomía y FisiologíaKAREN LIZETH CARRILLO NIOBelum ada peringkat
- Clase de Fractura y Luxaciones de CodoDokumen103 halamanClase de Fractura y Luxaciones de CodoOrtopedia & Traumatología HMUBelum ada peringkat
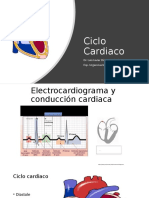
- Ciclo CardiacoDokumen17 halamanCiclo CardiacoItzel OlivaresBelum ada peringkat
- Embriología, Anatomía, Fisiología y Semiología de La FaríngeDokumen24 halamanEmbriología, Anatomía, Fisiología y Semiología de La FaríngeJoel BurgosBelum ada peringkat
- Ssitema Nervioso AutonomoDokumen46 halamanSsitema Nervioso AutonomoAndreaSoto100% (3)
- Vías Sensoriales y MotorasDokumen21 halamanVías Sensoriales y MotorasDaYana GonzalesBelum ada peringkat
- MasajesDokumen4 halamanMasajesJuliet Azuara Villicaña100% (1)
- Sistema LocomotorDokumen17 halamanSistema LocomotorJavier Mercado DiazBelum ada peringkat
- Sistema GenitourinarioDokumen41 halamanSistema GenitourinarioAna Canas100% (1)
- Cuestionario CDokumen2 halamanCuestionario CJose Cámara100% (1)
- Hueco AxilarDokumen18 halamanHueco AxilarBruno Santiago Luna FlorezBelum ada peringkat
- Tarea 1Dokumen2 halamanTarea 1clara carvajalBelum ada peringkat
- TALLER MUSCULOS DE LA MIMICA, ArregloDokumen21 halamanTALLER MUSCULOS DE LA MIMICA, Arregloyeraldine romeroBelum ada peringkat
- Clase3 OsteomioartDokumen46 halamanClase3 OsteomioartMiriam VelasquezBelum ada peringkat
- Osteologadecrneo 111016200019 Phpapp02 1Dokumen16 halamanOsteologadecrneo 111016200019 Phpapp02 1RafaelCamargoArguellesBelum ada peringkat
- Posición Anatómica CorporalDokumen6 halamanPosición Anatómica CorporalOMAIDA CARVAJALINO NAVARROBelum ada peringkat
- Musculo CiliarDokumen6 halamanMusculo CiliarDaniel RamirezBelum ada peringkat
- Inspeccion de BiomecanicaDokumen425 halamanInspeccion de Biomecanicaluis herreraBelum ada peringkat
- Ficha de Evaluación Hemiplejia 1Dokumen2 halamanFicha de Evaluación Hemiplejia 1Juan-Jo Valverde Ayte92% (12)
- Plexos 2Dokumen39 halamanPlexos 2shizuma94Belum ada peringkat
- Análisis de SassouniDokumen26 halamanAnálisis de SassouniAlejandra Zambrano ValeroBelum ada peringkat
- Anatomía Aplicada de La Cabeza y CuelloDokumen12 halamanAnatomía Aplicada de La Cabeza y CuelloVictoria Castro ZárateBelum ada peringkat
- Acupuntura SegmentariaDokumen5 halamanAcupuntura SegmentariaCamiloBelum ada peringkat
- CefalometríaDokumen122 halamanCefalometríatito77100% (1)