Anda mungkin juga menyukai
- Examenes de Matematica de 3ro 4to 5to y 6toDokumen4 halamanExamenes de Matematica de 3ro 4to 5to y 6torosa soto100% (1)
- Actividad6 Tecnologia de Materiales1Dokumen5 halamanActividad6 Tecnologia de Materiales1Franklyn SierraBelum ada peringkat
- ACTIVIDAD 3 UniDokumen3 halamanACTIVIDAD 3 UniKevin Alipio CarrascoBelum ada peringkat
- Manual para Elaborar Cerveza en Casa A NivelDokumen15 halamanManual para Elaborar Cerveza en Casa A NivelchristianBelum ada peringkat
- HBX 1512Dokumen3 halamanHBX 1512Hendricks FinolBelum ada peringkat
- ALGEBRA - 3° POLINOMIOS Clase 2Dokumen14 halamanALGEBRA - 3° POLINOMIOS Clase 2Ismael Anaya VillosladaBelum ada peringkat
- Ficha Tecnica GrooveDokumen4 halamanFicha Tecnica Grooveesteban muñozBelum ada peringkat
- Determinacion Del Calor de NeutralizacionDokumen31 halamanDeterminacion Del Calor de NeutralizacionMiguel Antony Zumaeta GonzalesBelum ada peringkat
- S08.s1 - Taller Práctico 8Dokumen2 halamanS08.s1 - Taller Práctico 8Pieroo SantistebanBelum ada peringkat
- Aplicaciones SIG en La ArqueologíaDokumen10 halamanAplicaciones SIG en La Arqueologíajoaquin anaiz vasquez hernandezBelum ada peringkat
- Tarea 8 CompletaDokumen16 halamanTarea 8 CompletaBENITES GASTAÑADUI RODRIGO SEBASTIANBelum ada peringkat
- Calendario Funciones TrigonométricasDokumen12 halamanCalendario Funciones TrigonométricasSantiago Arias RojasBelum ada peringkat
- 5 CubicacionesDokumen41 halaman5 CubicacionesAlejandra Garay CortesiBelum ada peringkat
- Secuencias de Resonancia MagnéticaDokumen23 halamanSecuencias de Resonancia MagnéticaDuverli Egaña100% (4)
- Nudos y AmarresDokumen18 halamanNudos y AmarresAngel AlcarazBelum ada peringkat
- Tutorial Del Teorema de PitágorasDokumen5 halamanTutorial Del Teorema de PitágorasJenjen Jenny YiniBelum ada peringkat
- WordDokumen6 halamanWordAurimar SalasBelum ada peringkat
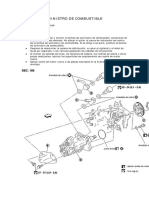
- Nissan Bomba de Suministro de CombustibleDokumen25 halamanNissan Bomba de Suministro de CombustibleIsrael TomalaBelum ada peringkat
- 6 Razones de CambioDokumen13 halaman6 Razones de CambioMathematical ExperiencesBelum ada peringkat
- Ejercicios de Tarea de La Unidad IiDokumen2 halamanEjercicios de Tarea de La Unidad IiBLANCAESTHELA NUÑEZ HERNANDEZBelum ada peringkat
- Cargas ElectricasDokumen3 halamanCargas ElectricasAlex SolisBelum ada peringkat
- Trabajo Final Canonicidad e Inspiración BíblicaDokumen2 halamanTrabajo Final Canonicidad e Inspiración BíblicaJennyBelum ada peringkat
- TD Nº1 Estatica de Los FluidosDokumen8 halamanTD Nº1 Estatica de Los FluidosJorge Luis PerezBelum ada peringkat
- Manual Calefont 7 LitrosDokumen11 halamanManual Calefont 7 LitrosAlicia Fernandez Z.Belum ada peringkat
- Producto VectorialDokumen2 halamanProducto VectorialErick CuyuchBelum ada peringkat
- Introduccion A La ElectroterapiaDokumen4 halamanIntroduccion A La ElectroterapiaJhenyBelum ada peringkat
- Plan de Estudio Fisica 10Dokumen5 halamanPlan de Estudio Fisica 10Gabriel CamposBelum ada peringkat
- Mesa de Analogia de StokesDokumen4 halamanMesa de Analogia de StokesConstantino Guevara BBelum ada peringkat
- AbrilDokumen90 halamanAbrilCoordinador MantenimientoBelum ada peringkat
- Madera LaminadaDokumen190 halamanMadera LaminadaJael MillanBelum ada peringkat