Anda mungkin juga menyukai
- Ee 491 Machine 1Dokumen30 halamanEe 491 Machine 1swagato deyBelum ada peringkat
- Ee 8361 Edc Lab Manual 2021-1-90Dokumen90 halamanEe 8361 Edc Lab Manual 2021-1-90Everbloom EverbloomBelum ada peringkat
- Experiment Beyond Syllabus Experiment - 14: 15eel38 Electrical Lab - IDokumen6 halamanExperiment Beyond Syllabus Experiment - 14: 15eel38 Electrical Lab - IsanjuBelum ada peringkat
- Practical Manual: Electrical Machine LabDokumen4 halamanPractical Manual: Electrical Machine LabSurajMauryaBelum ada peringkat
- O.C.C. & Load Test On Separately Excited D.C. GeneratorDokumen18 halamanO.C.C. & Load Test On Separately Excited D.C. GeneratorSuyash KothawadeBelum ada peringkat
- SEPARATELY EXCITED DC GENERATOR OCC & LOAD TESTDokumen18 halamanSEPARATELY EXCITED DC GENERATOR OCC & LOAD TESTSuyash KothawadeBelum ada peringkat
- Characteristics of DC GeneratorsDokumen8 halamanCharacteristics of DC GeneratorsNdavi KiangiBelum ada peringkat
- PEE492C Electrical Machines and Measurement LabDokumen12 halamanPEE492C Electrical Machines and Measurement LabRaqib ChohdharyBelum ada peringkat
- Open Circuit and Load Characteristics of Separately Excited DC GeneratorDokumen10 halamanOpen Circuit and Load Characteristics of Separately Excited DC GeneratorAkshit VSBelum ada peringkat
- Three Phase Induction Motor ExperimentDokumen21 halamanThree Phase Induction Motor ExperimentKarthik GanjiBelum ada peringkat
- Emech Exp-2Dokumen14 halamanEmech Exp-2ATCBelum ada peringkat
- Brake Test On Three Phase Induction MotorDokumen31 halamanBrake Test On Three Phase Induction MotorLalam Hari CharanBelum ada peringkat
- Exp 1 N 2Dokumen16 halamanExp 1 N 2mallikarjunbpatilBelum ada peringkat
- List of Experiments: Sno Name of The Experiment Date SignatureDokumen41 halamanList of Experiments: Sno Name of The Experiment Date SignatureRajeshKanchanaBelum ada peringkat
- EE 6512 EM II Lab ManualDokumen122 halamanEE 6512 EM II Lab Manualsaravanaeee2004Belum ada peringkat
- EEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringDokumen7 halamanEEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringAkshit VSBelum ada peringkat
- No-Load & Blocked Rotor TestsDokumen8 halamanNo-Load & Blocked Rotor TestsmallikarjunbpatilBelum ada peringkat
- Sistemas Eléctricos de Potencia: Prueba de vacío y cortocircuito de generadoresDokumen11 halamanSistemas Eléctricos de Potencia: Prueba de vacío y cortocircuito de generadoresJuniorChavezPeraltaBelum ada peringkat
- DC shunt motor brake test characteristics curvesDokumen2 halamanDC shunt motor brake test characteristics curvesSatwik PamulaparthyBelum ada peringkat
- Electrical Machine Lab ManualDokumen78 halamanElectrical Machine Lab ManualabBelum ada peringkat
- EE8411-Electrical Machines Laboratory-II-Lab Manual PDFDokumen80 halamanEE8411-Electrical Machines Laboratory-II-Lab Manual PDFkrishnandrk100% (2)
- DC Compound Generator LoadtestDokumen4 halamanDC Compound Generator LoadtestsagrvBelum ada peringkat
- Load Test On D.C. Series MotorDokumen5 halamanLoad Test On D.C. Series Motorramniwas123Belum ada peringkat
- DC MachineDokumen30 halamanDC MachineAzza FaiadBelum ada peringkat
- Ee2259 LMDokumen90 halamanEe2259 LMPradeep KBelum ada peringkat
- Electrical Machines II LAB MANUALDokumen45 halamanElectrical Machines II LAB MANUALram kumarBelum ada peringkat
- LOAD TEST SERIES GENERATORDokumen3 halamanLOAD TEST SERIES GENERATORVARAPRASADBelum ada peringkat
- Load Test On DC Shunt MotorDokumen6 halamanLoad Test On DC Shunt MotorsanjuBelum ada peringkat
- EE6512-Electrical Machines LaboratoryDokumen82 halamanEE6512-Electrical Machines LaboratoryGopinath B L NaiduBelum ada peringkat
- Exp 3 Machine EEE206Dokumen6 halamanExp 3 Machine EEE206mahmudulBelum ada peringkat
- LM 1819Dokumen10 halamanLM 1819Pozo Do CabaloBelum ada peringkat
- 1A - OCC and Load Characteristics of A Self Excited DC Shunt GeneratorDokumen4 halaman1A - OCC and Load Characteristics of A Self Excited DC Shunt GeneratorAkash MBelum ada peringkat
- Electrical Machines Lab ManualDokumen67 halamanElectrical Machines Lab Manualkrishnandrk100% (2)
- Swinburns'S Test On D.C Shunt MachineDokumen15 halamanSwinburns'S Test On D.C Shunt MachineharimadhavareddyBelum ada peringkat
- EEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringDokumen9 halamanEEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringAkshit VSBelum ada peringkat
- LOAD TEST ON DC COMPOUND GENERATORDokumen4 halamanLOAD TEST ON DC COMPOUND GENERATORVARAPRASADBelum ada peringkat
- 1a.regulation of Alternator by Emf Method PDFDokumen7 halaman1a.regulation of Alternator by Emf Method PDFsakthipriyaBelum ada peringkat
- Em-Ii ExperimentDokumen19 halamanEm-Ii Experimentprince rajBelum ada peringkat
- Emc611s Lab 4, 2023Dokumen9 halamanEmc611s Lab 4, 2023DimphoBelum ada peringkat
- Dokumen - Tips - Brake Test On The 3 Phase Induction MotorDokumen2 halamanDokumen - Tips - Brake Test On The 3 Phase Induction Motorvamsikumar reddyBelum ada peringkat
- Pecd Lab Manual 6 Pract-1Dokumen20 halamanPecd Lab Manual 6 Pract-1akshay jawaleBelum ada peringkat
- DCMT .AnDokumen47 halamanDCMT .AnastridyoungtheoBelum ada peringkat
- KA3842Dokumen7 halamanKA3842QXNBelum ada peringkat
- Jawaharlal Nehru Technological University Anantapur College of Engineering Lab Report on Electrical Machines ExperimentsDokumen25 halamanJawaharlal Nehru Technological University Anantapur College of Engineering Lab Report on Electrical Machines ExperimentsSudharshan ChennupalliBelum ada peringkat
- Lab 3Dokumen4 halamanLab 3Liu WenBelum ada peringkat
- Steady-state performance of 3-phase induction motorDokumen32 halamanSteady-state performance of 3-phase induction motorSumit SinghBelum ada peringkat
- WBSCET Lab ExperimentsDokumen5 halamanWBSCET Lab Experimentsanirban0% (1)
- 2 Machine LabDokumen4 halaman2 Machine LabManoj GuptaBelum ada peringkat
- BRAKE TEST DC SHUNT MOTORDokumen3 halamanBRAKE TEST DC SHUNT MOTORVARAPRASADBelum ada peringkat
- Final Consolidated Expts-18eel46Dokumen55 halamanFinal Consolidated Expts-18eel46AshwiniBelum ada peringkat
- Practical Manual: Electrical Machine-I LabDokumen5 halamanPractical Manual: Electrical Machine-I LabHinaBelum ada peringkat
- Brake Test On The 3-Phase Induction MotorDokumen2 halamanBrake Test On The 3-Phase Induction MotorAravind Babu68% (37)
- Lab Manual: Electrical Engineering Materials & Semiconductor Devices Lab (EC-317-F)Dokumen41 halamanLab Manual: Electrical Engineering Materials & Semiconductor Devices Lab (EC-317-F)Ilavarasan TamizhBelum ada peringkat
- DC Machines Manual-1Dokumen38 halamanDC Machines Manual-1sarikaBelum ada peringkat
- Alternator Parallel OperationDokumen5 halamanAlternator Parallel OperationULLAHBelum ada peringkat
- Binder 1Dokumen48 halamanBinder 1deepanshu rajputBelum ada peringkat
- (Ece/Coe/Ice) ECE/COE/ICE-304: Linear Integrated CircuitsDokumen2 halaman(Ece/Coe/Ice) ECE/COE/ICE-304: Linear Integrated CircuitsHenery KantBelum ada peringkat
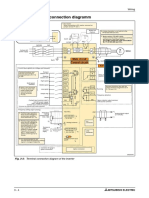
- Terminal Connection Diagramm WiringDokumen3 halamanTerminal Connection Diagramm WiringTran LeBelum ada peringkat
- Adv Communication Lab ManualDokumen63 halamanAdv Communication Lab ManualGopinath B L NaiduBelum ada peringkat
- Cornell Linear AlgebraDokumen331 halamanCornell Linear AlgebrachiquicikBelum ada peringkat
- 31Dokumen15 halaman31Gopinath B L NaiduBelum ada peringkat
- AEC Manual2017 IMPDokumen82 halamanAEC Manual2017 IMPGopinath B L NaiduBelum ada peringkat
- Hardware Design of A Smart Meter: Ganiyu A. Ajenikoko, Anthony A. OlaomiDokumen5 halamanHardware Design of A Smart Meter: Ganiyu A. Ajenikoko, Anthony A. OlaomiGopinath B L NaiduBelum ada peringkat
- 03 Slights Electrical Wiring PDFDokumen39 halaman03 Slights Electrical Wiring PDFDINESHBelum ada peringkat
- 15ECL38 - Digital-Electronics LMDokumen55 halaman15ECL38 - Digital-Electronics LMbnatarajBelum ada peringkat
- EeschsyllDokumen147 halamanEeschsyllNeelakanth BenakalBelum ada peringkat
- Digital Signal Processing Lab ManualDokumen61 halamanDigital Signal Processing Lab ManualOmer Sheikh100% (6)
- Eee IV Microcontrollers (10es42) AssignmentDokumen3 halamanEee IV Microcontrollers (10es42) AssignmentGopinath B L NaiduBelum ada peringkat
- SG PDFDokumen55 halamanSG PDFSumiBelum ada peringkat
- M S Engineering College: HDL Lab ManualDokumen78 halamanM S Engineering College: HDL Lab Manualvivek jBelum ada peringkat
- B.T.L. Institute of Technology and Management, BangaloreDokumen1 halamanB.T.L. Institute of Technology and Management, BangaloreGopinath B L NaiduBelum ada peringkat
- Digital Signal Processing: Laboratory ManualDokumen101 halamanDigital Signal Processing: Laboratory ManualGopinath B L NaiduBelum ada peringkat
- DSP Lab ManualDokumen99 halamanDSP Lab ManualGopinath B L NaiduBelum ada peringkat
- The Smart Grid - An IntroductionDokumen48 halamanThe Smart Grid - An IntroductionHans De Keulenaer88% (8)
- 6-Multirate DSP v2003Dokumen346 halaman6-Multirate DSP v2003sebastian nasiBelum ada peringkat
- Emec IIISem ECE PDFDokumen47 halamanEmec IIISem ECE PDFGopinath B L NaiduBelum ada peringkat
- VTU Exam Results for BEEEG10EE71 Computer Techniques 2013 BatchDokumen2 halamanVTU Exam Results for BEEEG10EE71 Computer Techniques 2013 BatchGopinath B L NaiduBelum ada peringkat
- Benefits of Smart GridDokumen55 halamanBenefits of Smart GridkaaisBelum ada peringkat
- Smart Grid Concept & Deployment - Dr. Saikat ChakrabartyDokumen18 halamanSmart Grid Concept & Deployment - Dr. Saikat ChakrabartyRushikesh KulkarniBelum ada peringkat
- 8 PDFDokumen11 halaman8 PDFGopinath B L NaiduBelum ada peringkat
- BTL 4th Sem Power Electronics Lab ManualDokumen88 halamanBTL 4th Sem Power Electronics Lab ManualGopinath B L NaiduBelum ada peringkat
- DC Machines Lab ManualDokumen153 halamanDC Machines Lab ManualdaluBelum ada peringkat
- BTL Institute of Technology & Management Microcontrollers Lab Manual largest element sorting algorithmDokumen68 halamanBTL Institute of Technology & Management Microcontrollers Lab Manual largest element sorting algorithmGopinath B L NaiduBelum ada peringkat
- Electrical Machines Lab ManualDokumen68 halamanElectrical Machines Lab Manualgopi_90550% (2)
- PDFDokumen187 halamanPDFramanaidu1Belum ada peringkat
- DSP Lab Manual 15-11-2016Dokumen3 halamanDSP Lab Manual 15-11-2016Gopinath B L NaiduBelum ada peringkat
- DSP Lab Manual As Per VTU PDFDokumen68 halamanDSP Lab Manual As Per VTU PDFGopinath B L NaiduBelum ada peringkat
- Langsdorf ContinuaDokumen434 halamanLangsdorf ContinuaEdyson91Belum ada peringkat
- No Load and Load Test - Electrical MachinesDokumen22 halamanNo Load and Load Test - Electrical MachinesMadhumita KaruppusamyBelum ada peringkat
- Corrosion Control ChemistryDokumen84 halamanCorrosion Control Chemistry054- Siva manoj reddyBelum ada peringkat
- Physics 1Dokumen161 halamanPhysics 1Muskan PooniaBelum ada peringkat
- Dynamic Braking Chapter 9Dokumen28 halamanDynamic Braking Chapter 9pabloBelum ada peringkat
- Assignment 2Dokumen5 halamanAssignment 2Chaitanya KumarBelum ada peringkat
- Experiment 7,8 and 9Dokumen15 halamanExperiment 7,8 and 9Katherine OsicosBelum ada peringkat
- PHY121 Electricity and MagnetismDokumen74 halamanPHY121 Electricity and Magnetismstephenalfa7Belum ada peringkat
- D.C.Machine Problems With Solutions: Date Modified-30 Jun.1999Dokumen16 halamanD.C.Machine Problems With Solutions: Date Modified-30 Jun.1999Sandunga SalsotecaBelum ada peringkat
- +2 Physics Unit - 4 (2m, 3m, 5m) Study Material Em-Kalviexpress PDFDokumen20 halaman+2 Physics Unit - 4 (2m, 3m, 5m) Study Material Em-Kalviexpress PDFJASMINE.ABelum ada peringkat
- Aircraft Electrical Systems (Pallett)Dokumen192 halamanAircraft Electrical Systems (Pallett)Abolfazl Mazloomi100% (2)
- Current ElectricityDokumen108 halamanCurrent ElectricitydynamicranjanBelum ada peringkat
- HEAT LAWSDokumen29 halamanHEAT LAWSMohib UddinBelum ada peringkat
- KIRCHHOFF'S RULES WORKSHEETDokumen7 halamanKIRCHHOFF'S RULES WORKSHEETDino Manuel E. PrestadoBelum ada peringkat
- Acid and Base and RedoxDokumen53 halamanAcid and Base and RedoxH M AwaisBelum ada peringkat
- Unit - 4 Electromagnetic InductionDokumen13 halamanUnit - 4 Electromagnetic InductionSahil ChawlaBelum ada peringkat
- Chapter 20 CircuitsDokumen9 halamanChapter 20 CircuitsjojonBelum ada peringkat
- DC GeneratorDokumen24 halamanDC GeneratorRahmat Bagus ArdhiansyahBelum ada peringkat
- General Military KnowledgeDokumen16 halamanGeneral Military KnowledgeRamon ZuñigaBelum ada peringkat
- EM Synchronous GeneratorDokumen22 halamanEM Synchronous GeneratorDeepanshu SehgalBelum ada peringkat
- DCS800 Firmware Structure DiagramsDokumen6 halamanDCS800 Firmware Structure DiagramsRizaldy Rohimawan SantosoBelum ada peringkat
- ELECTROCHEMISTRY: An IntroductionDokumen23 halamanELECTROCHEMISTRY: An IntroductionVignesh VbBelum ada peringkat
- NEET 2023 Potentiometer Problems and SolutionsDokumen4 halamanNEET 2023 Potentiometer Problems and Solutionsarohi yadavBelum ada peringkat
- Elementary Atomic Structure and Electricity QuizDokumen100 halamanElementary Atomic Structure and Electricity QuizDonna KrisBelum ada peringkat
- 9702 m22+s22 P1Dokumen65 halaman9702 m22+s22 P1Zubair AhmadBelum ada peringkat
- Electrical Term - Bu2Dokumen14 halamanElectrical Term - Bu2BRIAN DIQUIATCOBelum ada peringkat
- 3rd Class Electrotech Exam Help From Martin's Marine Engineering PageDokumen2 halaman3rd Class Electrotech Exam Help From Martin's Marine Engineering PageEge CBelum ada peringkat
- Elec - Magnetism Course OutlineDokumen4 halamanElec - Magnetism Course OutlineBernard PanganibanBelum ada peringkat
- Unit II Electrochemistry - 2Dokumen51 halamanUnit II Electrochemistry - 2abhijithBelum ada peringkat
- Cam Tech Hitachi TM El Locoeng 05Dokumen58 halamanCam Tech Hitachi TM El Locoeng 05santhosh kumarBelum ada peringkat
- Build Your Own Electric Vehicle, Third EditionDari EverandBuild Your Own Electric Vehicle, Third EditionPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Electronics All-in-One For Dummies, 3rd EditionDari EverandElectronics All-in-One For Dummies, 3rd EditionPenilaian: 5 dari 5 bintang5/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4.5 dari 5 bintang4.5/5 (542)
- Operational Amplifier Circuits: Analysis and DesignDari EverandOperational Amplifier Circuits: Analysis and DesignPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- The Graphene Revolution: The Weird Science of the Ultra-thinDari EverandThe Graphene Revolution: The Weird Science of the Ultra-thinPenilaian: 4.5 dari 5 bintang4.5/5 (4)
- Understanding Automotive Electronics: An Engineering PerspectiveDari EverandUnderstanding Automotive Electronics: An Engineering PerspectivePenilaian: 3.5 dari 5 bintang3.5/5 (16)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsDari EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsPenilaian: 4 dari 5 bintang4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesDari EverandThe Rare Metals War: the dark side of clean energy and digital technologiesPenilaian: 5 dari 5 bintang5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDari EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgePenilaian: 5 dari 5 bintang5/5 (8)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemDari EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemBelum ada peringkat
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsDari EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsPenilaian: 5 dari 5 bintang5/5 (3)
- 8051 Microcontroller: An Applications Based IntroductionDari Everand8051 Microcontroller: An Applications Based IntroductionPenilaian: 5 dari 5 bintang5/5 (6)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4 dari 5 bintang4/5 (331)
- Automotive Electronic Diagnostics (Course 2)Dari EverandAutomotive Electronic Diagnostics (Course 2)Penilaian: 4 dari 5 bintang4/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingDari EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingPenilaian: 4 dari 5 bintang4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Dari EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Penilaian: 5 dari 5 bintang5/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsDari EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovBelum ada peringkat
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessDari EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessBelum ada peringkat
- A Mind at Play: How Claude Shannon Invented the Information AgeDari EverandA Mind at Play: How Claude Shannon Invented the Information AgePenilaian: 4 dari 5 bintang4/5 (52)
- Electrical Principles and Technology for EngineeringDari EverandElectrical Principles and Technology for EngineeringPenilaian: 4 dari 5 bintang4/5 (4)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsDari EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsPenilaian: 5 dari 5 bintang5/5 (2)