Anda mungkin juga menyukai
- Anaphy Chap 1-12Dokumen103 halamanAnaphy Chap 1-12Margaret Isabel LacdaoBelum ada peringkat
- Beams Section (Design Sheet) - 11.03.13Dokumen61 halamanBeams Section (Design Sheet) - 11.03.13Ouseppachan AmbookenBelum ada peringkat
- Welds - Static and Fatigue Strength - IiDokumen27 halamanWelds - Static and Fatigue Strength - IiOuseppachan Ambooken100% (1)
- Design of Steel BeamDokumen18 halamanDesign of Steel BeamOuseppachan Ambooken100% (4)
- Larsen & Toubro Limited: Edrc-B&F OcDokumen22 halamanLarsen & Toubro Limited: Edrc-B&F OcOuseppachan AmbookenBelum ada peringkat
- ProjectDokumen18 halamanProjectapi-525983464Belum ada peringkat
- Lecture 10 Engineered NanomaterialsDokumen29 halamanLecture 10 Engineered NanomaterialsNiña Viaña BinayBelum ada peringkat
- GergDokumen18 halamanGergOuseppachan AmbookenBelum ada peringkat
- Shear Check in ColumnDokumen2 halamanShear Check in ColumnOuseppachan AmbookenBelum ada peringkat
- Curved Bar NodesDokumen17 halamanCurved Bar NodesfrankytgBelum ada peringkat
- Behavior of Partially Encased Slender Composite Columns in Eccentric Loading by Saima Ali, Mahbuba Begum PDFDokumen10 halamanBehavior of Partially Encased Slender Composite Columns in Eccentric Loading by Saima Ali, Mahbuba Begum PDFgulilero_yoBelum ada peringkat
- Larsen & Toubro Limited: ECC Division - EDRCDokumen4 halamanLarsen & Toubro Limited: ECC Division - EDRCOuseppachan AmbookenBelum ada peringkat
- A Comparative Study On T-Beam Girder and Box Girder Bridges For Different Skew AnglesDokumen6 halamanA Comparative Study On T-Beam Girder and Box Girder Bridges For Different Skew AnglesVikramBelum ada peringkat
- Handbook of Railroad Construction; For the use of American engineersDari EverandHandbook of Railroad Construction; For the use of American engineersBelum ada peringkat
- Pipe Rack Design-11.03.13Dokumen56 halamanPipe Rack Design-11.03.13Ouseppachan Ambooken100% (1)
- Basic Programming XRC PDFDokumen204 halamanBasic Programming XRC PDFOscar SaucedoBelum ada peringkat
- Retaining Wall ExcelDokumen82 halamanRetaining Wall ExcelOuseppachan AmbookenBelum ada peringkat
- SHS and RHSDokumen16 halamanSHS and RHSOuseppachan AmbookenBelum ada peringkat
- Tubular SectionDokumen15 halamanTubular SectionOuseppachan AmbookenBelum ada peringkat
- Deflection Theory Analysis of Different Cable Profiles For Suspension BridgesDokumen11 halamanDeflection Theory Analysis of Different Cable Profiles For Suspension BridgesRajat GuptaBelum ada peringkat
- Finite Element Analysis and Tests On Bolted End-Plate by Shi 2004Dokumen12 halamanFinite Element Analysis and Tests On Bolted End-Plate by Shi 2004fahmi aballiBelum ada peringkat
- Chapter 34Dokumen9 halamanChapter 34Joey JohnsonBelum ada peringkat
- Chapter 2, Oct 8Dokumen24 halamanChapter 2, Oct 8Sabin Leroy HmgnBelum ada peringkat
- Analysis of Statically Determinate Structures: Idealized StructureDokumen23 halamanAnalysis of Statically Determinate Structures: Idealized Structureعبدالله عبدالحكيم عامرBelum ada peringkat
- Study On The Curve Shape of C-Shaped Armature's Trailing Arms in Rectangular Bore RailgunDokumen7 halamanStudy On The Curve Shape of C-Shaped Armature's Trailing Arms in Rectangular Bore RailgunSaravana Kumar M NBelum ada peringkat
- Moment Curvature CharacteristicsDokumen17 halamanMoment Curvature CharacteristicsAlex100% (1)
- Column Stability Type-2 ConstructionDokumen5 halamanColumn Stability Type-2 ConstructionKarthi SriBelum ada peringkat
- Book Structural-Stability-Theory-And-Implementation1Dokumen3 halamanBook Structural-Stability-Theory-And-Implementation1هديل عميرةBelum ada peringkat
- Simplified Frame Design of Type PR ConstructionDokumen6 halamanSimplified Frame Design of Type PR ConstructionConan EdogawaBelum ada peringkat
- 1 s2.0 0143974X87900587 MainDokumen42 halaman1 s2.0 0143974X87900587 MainAleff Gonçalves QuintinoBelum ada peringkat
- Paper - Pile Stiffness in SuperstressDokumen5 halamanPaper - Pile Stiffness in SuperstressSimon EdwardsBelum ada peringkat
- RSID2008-Lapuz Etal-RevDokumen6 halamanRSID2008-Lapuz Etal-RevAndy OretaBelum ada peringkat
- Concerns On Seismic Moment-Shear Connections Using Available Indian Hot-Rolled I-SectionsDokumen3 halamanConcerns On Seismic Moment-Shear Connections Using Available Indian Hot-Rolled I-SectionsAJBAJBBelum ada peringkat
- Hu2011 2Dokumen16 halamanHu2011 2saeed betyarBelum ada peringkat
- 22 Ijmperdapr201822Dokumen12 halaman22 Ijmperdapr201822TJPRC PublicationsBelum ada peringkat
- 001 0013 PDFDokumen6 halaman001 0013 PDFganeshBelum ada peringkat
- Chapter 3.shear Force and Bending MomentDokumen6 halamanChapter 3.shear Force and Bending MomentEba GetachewBelum ada peringkat
- Stuct and Tie Modelling 01Dokumen37 halamanStuct and Tie Modelling 01YUK LAM WONGBelum ada peringkat
- Conjugate BeamDokumen9 halamanConjugate Beamአባ አለም ለምኔBelum ada peringkat
- Arch 21 Ce 265 2018-19Dokumen4 halamanArch 21 Ce 265 2018-19Hrithik RaiyanBelum ada peringkat
- Pietrzak (1988) - A Note On Optimum Geometry of A Portal FrameDokumen5 halamanPietrzak (1988) - A Note On Optimum Geometry of A Portal FrameGogyBelum ada peringkat
- Theory PresentationDokumen28 halamanTheory PresentationIcaBelum ada peringkat
- CHAPTER 2 .Colunm DesignDokumen17 halamanCHAPTER 2 .Colunm DesignDechas Mohammed100% (1)
- Unit-2 FLEXUREDokumen49 halamanUnit-2 FLEXURENicholas ThompsonBelum ada peringkat
- Are You Suprised - 2Dokumen13 halamanAre You Suprised - 2Mohit RajaiBelum ada peringkat
- Analysis of L Shaped RC Columns Subjected To BendingDokumen13 halamanAnalysis of L Shaped RC Columns Subjected To BendingMuhammad Wazim AkramBelum ada peringkat
- Hognestad ModelDokumen20 halamanHognestad ModelKorrapati Pratyusha 19PHD0497Belum ada peringkat
- Irjet V7i4357 PDFDokumen5 halamanIrjet V7i4357 PDFHimani PatelBelum ada peringkat
- Wachemo University College of Engineering and Technology Department of Civil Engineering Concrete Structures - CENG 6504 Due Date: May 30, 2022Dokumen4 halamanWachemo University College of Engineering and Technology Department of Civil Engineering Concrete Structures - CENG 6504 Due Date: May 30, 2022Daniel TagesseBelum ada peringkat
- Abstract André Branco de AlmeidaDokumen9 halamanAbstract André Branco de AlmeidaSara RamliBelum ada peringkat
- A Comparative Study On T-Beam Girder and Box Girder Bridges For Different Skew AnglesDokumen6 halamanA Comparative Study On T-Beam Girder and Box Girder Bridges For Different Skew AnglesPreeti AgarwalBelum ada peringkat
- D Y N A M I C Effects of Eccentric Loads in Composite Concrete and Steel Bridge Decks Made of A Pair of Main BeamsDokumen6 halamanD Y N A M I C Effects of Eccentric Loads in Composite Concrete and Steel Bridge Decks Made of A Pair of Main Beamsjuan carlos molano toroBelum ada peringkat
- Stress: Reinforced Concrete-WorkingDokumen12 halamanStress: Reinforced Concrete-Workingshna jabarBelum ada peringkat
- Deflection Estimation of Varying Cross Section Cantilever BeamDokumen3 halamanDeflection Estimation of Varying Cross Section Cantilever Beamrupali vijBelum ada peringkat
- Multistorey BuildingsDokumen27 halamanMultistorey BuildingsSyed IsmailBelum ada peringkat
- TIÊU CHUẨN KẾT CẤU THÉP ASIC HOA KỲ - Evaluation of ACI 318 and AISC (LRFD) Strength Provisions for Composite Beam ColumnsDokumen21 halamanTIÊU CHUẨN KẾT CẤU THÉP ASIC HOA KỲ - Evaluation of ACI 318 and AISC (LRFD) Strength Provisions for Composite Beam ColumnsTruc LeBelum ada peringkat
- New Analytical Calculation Models For Compressive Arch Action in Reinforced Concrete StructuresDokumen2 halamanNew Analytical Calculation Models For Compressive Arch Action in Reinforced Concrete Structureskashif2298Belum ada peringkat
- 6 Shear Bond and Anchorage in RC ElementsDokumen15 halaman6 Shear Bond and Anchorage in RC ElementsMAINA ANTONY WAMBUGUBelum ada peringkat
- 6 Shear Bond and Anchorage in RC ElementsDokumen15 halaman6 Shear Bond and Anchorage in RC ElementsKen MutuiBelum ada peringkat
- Unrestrained Beam Design-IiDokumen21 halamanUnrestrained Beam Design-Iihemant_durgawaleBelum ada peringkat
- A Historical and Technical Overview of The CB Coefficient in The AISC SpecificationsDokumen5 halamanA Historical and Technical Overview of The CB Coefficient in The AISC SpecificationscharlesroberBelum ada peringkat
- Classification RC BC JointsDokumen11 halamanClassification RC BC JointsMARUFBelum ada peringkat
- Chapter 3 Shear Force and Bending Moment in BeamsDokumen8 halamanChapter 3 Shear Force and Bending Moment in BeamslidetechristoszinabuBelum ada peringkat
- Deep BeamDokumen7 halamanDeep BeamTemesgenBelum ada peringkat
- Moment-Curvature Relation of Reinforced Concrete TDokumen8 halamanMoment-Curvature Relation of Reinforced Concrete TKorrapati Pratyusha 19PHD0497Belum ada peringkat
- Analysis and Design of Column: Chapter ThreeDokumen23 halamanAnalysis and Design of Column: Chapter Threejebril yusufBelum ada peringkat
- Prestressed Concrete Analysis and Design Fundamentals 2nd Ed CAP 15Dokumen56 halamanPrestressed Concrete Analysis and Design Fundamentals 2nd Ed CAP 15Carlos Alberto Pacheco SierraBelum ada peringkat
- 11 - Chapter 3 PDFDokumen20 halaman11 - Chapter 3 PDFFahad khBelum ada peringkat
- Design of Industrial Storage RacksDokumen17 halamanDesign of Industrial Storage RacksJoseph MendozaBelum ada peringkat
- Chapter - 1 in Elastic Moment RedistributionDokumen8 halamanChapter - 1 in Elastic Moment RedistributionHelen NegashBelum ada peringkat
- DSS 2 (7th&8th) May2019Dokumen3 halamanDSS 2 (7th&8th) May2019Piara SinghBelum ada peringkat
- Deflection of Beams and Shafts: The Elastic CurveDokumen13 halamanDeflection of Beams and Shafts: The Elastic CurveNoermansyar SikandeBelum ada peringkat
- A Ductility Model For Steel Connections: L. Simo Es Da Silva, Ana Gira o CoelhoDokumen26 halamanA Ductility Model For Steel Connections: L. Simo Es Da Silva, Ana Gira o CoelhoAmine OsmaniBelum ada peringkat
- An Introduction to the Physics and Electrochemistry of Semiconductors: Fundamentals and ApplicationsDari EverandAn Introduction to the Physics and Electrochemistry of Semiconductors: Fundamentals and ApplicationsBelum ada peringkat
- Cylindrical Compression Helix Springs For Suspension SystemsDari EverandCylindrical Compression Helix Springs For Suspension SystemsBelum ada peringkat
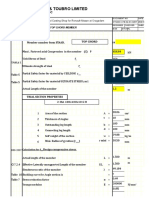
- Coversheet Excel Format - 550 TPD SAP (SEYA)Dokumen4 halamanCoversheet Excel Format - 550 TPD SAP (SEYA)Ouseppachan AmbookenBelum ada peringkat
- FOX Solutions - Project Reference List PDFDokumen16 halamanFOX Solutions - Project Reference List PDFOuseppachan AmbookenBelum ada peringkat
- Rgrid 27-28 ColumnDokumen35 halamanRgrid 27-28 ColumnOuseppachan AmbookenBelum ada peringkat
- Bathe-Fem Book PDFDokumen1.050 halamanBathe-Fem Book PDFOuseppachan AmbookenBelum ada peringkat
- Teaching Principles of Seismic-Resistant Design of Steel Building StructuresDokumen8 halamanTeaching Principles of Seismic-Resistant Design of Steel Building StructuresOuseppachan AmbookenBelum ada peringkat
- Square Hollow SectionsDokumen16 halamanSquare Hollow SectionsOuseppachan AmbookenBelum ada peringkat
- Rgrid 27-28 ColumnDokumen35 halamanRgrid 27-28 ColumnOuseppachan AmbookenBelum ada peringkat
- Tubular Sections-Hazira Project (Available)Dokumen3 halamanTubular Sections-Hazira Project (Available)Ouseppachan AmbookenBelum ada peringkat
- Bolted Connections ProbsDokumen25 halamanBolted Connections ProbsOuseppachan AmbookenBelum ada peringkat
- Exercicis GEODokumen17 halamanExercicis GEOJoan PerelloBelum ada peringkat
- EagleBurgmann TS4000 enDokumen3 halamanEagleBurgmann TS4000 enkeyur1109Belum ada peringkat
- Water-Lithium Bromide Vapor Absorption SystemDokumen15 halamanWater-Lithium Bromide Vapor Absorption SystemSagar MoreBelum ada peringkat
- Voice Over Internet Protocol (VOIP) : Overview, Direction and ChallengesDokumen12 halamanVoice Over Internet Protocol (VOIP) : Overview, Direction and ChallengesJuscal KwrldBelum ada peringkat
- Hardy Weinberg Law WorksheetDokumen4 halamanHardy Weinberg Law WorksheetThanos GamingBelum ada peringkat
- ES MT 0106 - REV1.30 - 24122019 - 6021282 DIAM 4100 Rev 1 30 - EN 2Dokumen64 halamanES MT 0106 - REV1.30 - 24122019 - 6021282 DIAM 4100 Rev 1 30 - EN 2Paix AvousBelum ada peringkat
- The Mostly Complete Chart of Neural NetworksDokumen19 halamanThe Mostly Complete Chart of Neural NetworksCarlos Villamizar100% (1)
- Conversion RuleDokumen5 halamanConversion RuleAshwinBelum ada peringkat
- VLOOKUP Function in ExcelDokumen2 halamanVLOOKUP Function in ExcelnbushscribdBelum ada peringkat
- In Uence Des Milieux de Conservation Sur Les Propriétés Physico-Mécaniques de Béton de Sable de DunesDokumen9 halamanIn Uence Des Milieux de Conservation Sur Les Propriétés Physico-Mécaniques de Béton de Sable de DunesAbderraouf KamelBelum ada peringkat
- Chemical Resistance List EnglishDokumen11 halamanChemical Resistance List EnglishdpaoluccBelum ada peringkat
- Tomar - Industrial Signalling CatalogDokumen82 halamanTomar - Industrial Signalling CatalogPrejit RadhakrishnaBelum ada peringkat
- Evermotion Archmodels Vol 55 PDFDokumen2 halamanEvermotion Archmodels Vol 55 PDFLisaBelum ada peringkat
- FFUS2613LS4 Frigidaire Refrigerator Wiring 240389639Dokumen2 halamanFFUS2613LS4 Frigidaire Refrigerator Wiring 240389639aderloch100% (1)
- Lec#3 Pavement Materials - JMFDokumen57 halamanLec#3 Pavement Materials - JMFUsama AliBelum ada peringkat
- Strength of MatrialDokumen36 halamanStrength of MatrialahmedanyBelum ada peringkat
- Thoracodorsal Artery Perforator Flap (TAP Flap)Dokumen1 halamanThoracodorsal Artery Perforator Flap (TAP Flap)Consultorio Cirurgia plásticaBelum ada peringkat
- 3000 Distributed Antenna System: FeaturesDokumen2 halaman3000 Distributed Antenna System: FeaturesforwirelessBelum ada peringkat
- Numerical Modeling of Helical Pile PDFDokumen12 halamanNumerical Modeling of Helical Pile PDFHizb UllahBelum ada peringkat
- Simatic: STEP 7 Professional 2010 SR4 Engineering Software For SIMATIC S7 / M7 / C7Dokumen16 halamanSimatic: STEP 7 Professional 2010 SR4 Engineering Software For SIMATIC S7 / M7 / C7Noureddine ElaatmaniBelum ada peringkat
- Dome ValveDokumen6 halamanDome Valvesaisssms9116Belum ada peringkat
- Miscellaneous Graph Theory Theorems and Exercises PDFDokumen4 halamanMiscellaneous Graph Theory Theorems and Exercises PDFrehan khanBelum ada peringkat
- Eigenvalue SMMHDokumen10 halamanEigenvalue SMMH2050-Ramisa FarihaBelum ada peringkat
- Chemistry Textbook 10 - 12 PDFDokumen86 halamanChemistry Textbook 10 - 12 PDFMusanta Simmon SimzBelum ada peringkat
- Chemical Energetics Chemistry AS/A LevelDokumen4 halamanChemical Energetics Chemistry AS/A Levelyep okBelum ada peringkat
- Program Min ChallengesDokumen9 halamanProgram Min Challengeslz1233Belum ada peringkat